
一种基于椭圆拟合的椭圆形物体分割方法.pdf

是你****嘉嘉

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于椭圆拟合的椭圆形物体分割方法.pdf
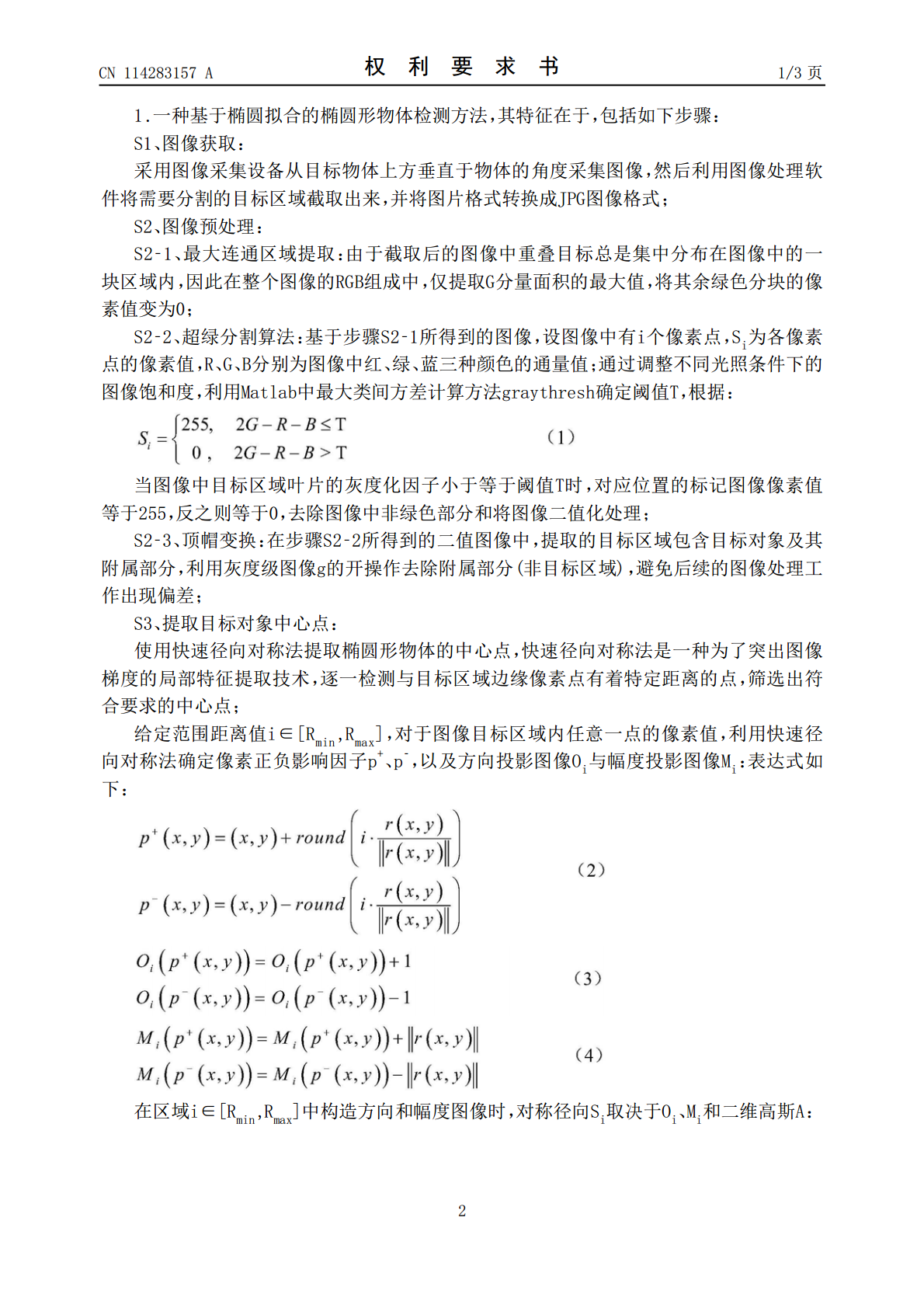
本发明公开了一种基于椭圆拟合的椭圆形物体分割方法,该方法通过提取图像RGB梯度值中G分量值的最大连通区域得到图像中目标区域的对象,再使用RGB超绿分割算法去除图片中背景因素的干扰,并利用顶帽变换方法去除非目标区域;结合基于距离变换和全局阈值的快速径向对称法来提取椭圆形对象的中心点;利用凹点检测和轮廓估计的方法来分割出椭圆形对象的边缘部分;最后利用基于最小二乘的椭圆拟合算法对重叠对象的被遮挡部分进行补全;该方法保证了重叠目标边缘点的准确提取;避免出现图像中因RGB色彩梯度值相近导致的对象边缘提取不完整,分割

基于运动历史图像和椭圆拟合的手势分割.docx
基于运动历史图像和椭圆拟合的手势分割摘要手势分割技术在人机交互、智能家居、机器人等领域中具有广泛的应用。本文基于运动历史图像和椭圆拟合,提出了一种新的手势分割方法。通过对手部运动轨迹的分析,我们可以获取手势的关键特征,利用椭圆拟合算法进行手势分割,并进行了相关实验验证。实验结果表明,我们提出的方法不仅能够精准地识别手势,而且具有较高的实时性和准确性。关键词:手势分割、运动历史图像、椭圆拟合、关键特征AbstractGesturesegmentationtechnologyhasawiderangeofap

基于惯量矩的椭圆拟合方法.docx
基于惯量矩的椭圆拟合方法基于惯量矩的椭圆拟合方法摘要:椭圆是一种在许多领域中都有重要应用的几何形状。在计算机视觉和图像处理中,拟合椭圆是一项基本任务,可以用于目标检测、目标跟踪等应用中。本论文提出了一种基于惯量矩的椭圆拟合方法,通过计算图像的二阶统计特征,利用方向信息进行椭圆参数的优化。实验结果表明,该方法具有较好的拟合精度和鲁棒性。1.引言椭圆是一种常见的几何形状,它在许多领域中都有广泛的应用。在计算机视觉和图像处理中,椭圆拟合是一个重要的任务,可以用于目标检测、目标跟踪、物体测量等应用。目前常用的椭圆

基于深度学习的自适应椭圆拟合细胞自动检测分割方法.pdf
本发明公开了基于深度学习的自适应椭圆拟合细胞自动检测分割方法,首先运用深度学习方法检测出病理图像中的细胞,然后运用主动轮廓模型找到精确的细胞轮廓,最后使用自适应椭圆拟合技术将重叠的细胞轮廓分割出来。本发明以大幅切片图为研究对象,采用深度学习加滑动窗口的方法,能准确找到图像中细胞的位置,主动轮廓结合自适应椭圆拟合对分割重叠细胞具有明显的效果。本发明提出的细胞自动检测分割方法能辅助临床医生对数字病理学切片中细胞进行量化评估,准确快速的进行临床诊断,减少不同观察者或同一个观察者在不同时间段间的诊断差异性。相对于

一种椭圆形钢丝制造方法.pdf
一种椭圆形钢丝制造方法,钢丝规格为长轴2.5mm、短轴1.65mm,选用原料钢号为72A或70#钢,直径6.5mm盘条生产,半成品钢丝直径为5.0mm,拉拔工艺为九道次,前两道次采用圆模拉拔,后七道次采用椭圆模拉拔,拉丝机选用直进式,生产车速为200~400m/min,工字轮收线,生产钢丝破断拉力达到5250~6000N、扭转>25次,各项性能指标达到技术要求,产品质量好。