
一种内窥镜下手术器械.pdf

景福****90

1/10
2/10
3/10

4/10
5/10
6/10
7/10

8/10
9/10
10/10
亲,该文档总共21页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种内窥镜下手术器械.pdf
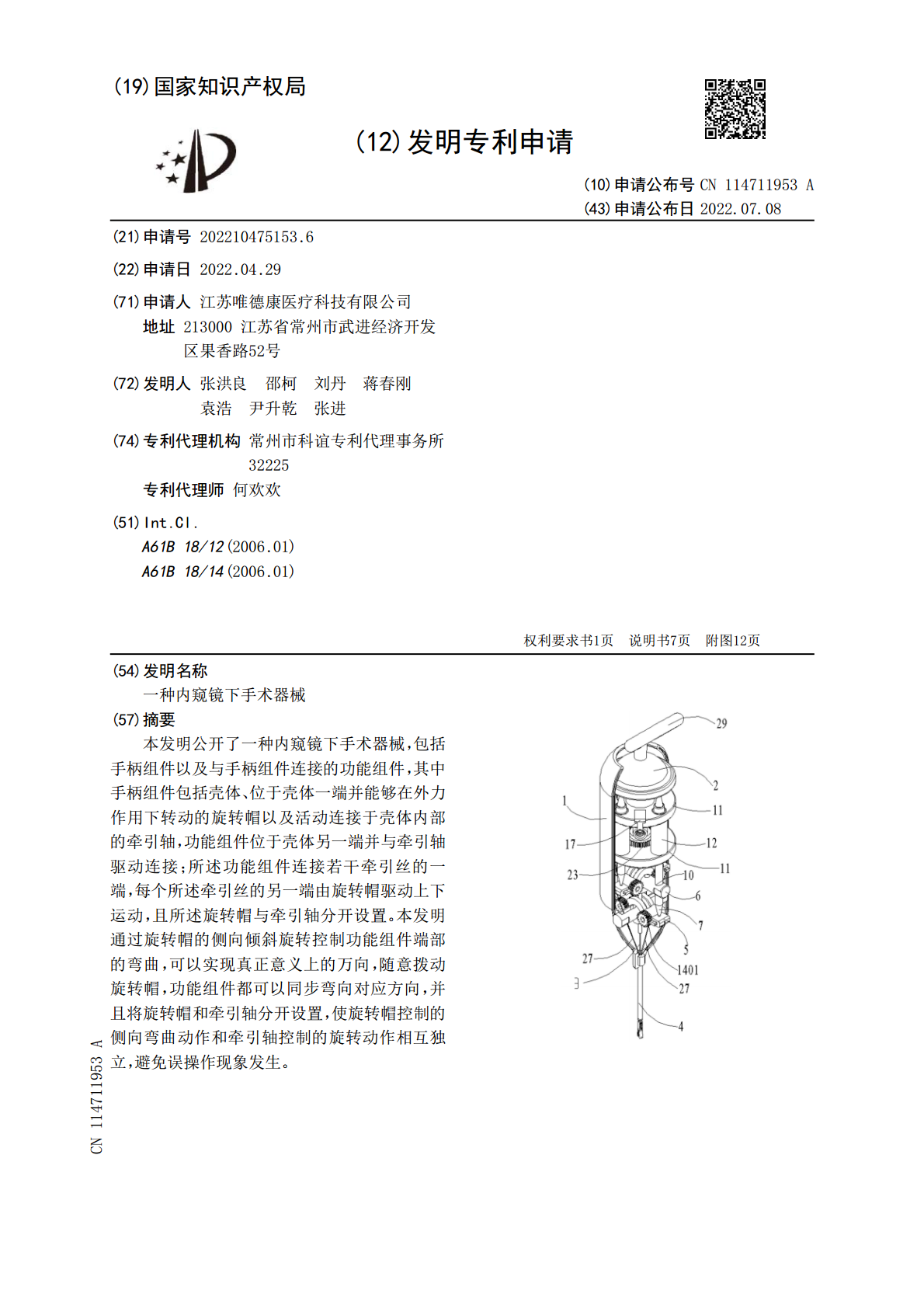
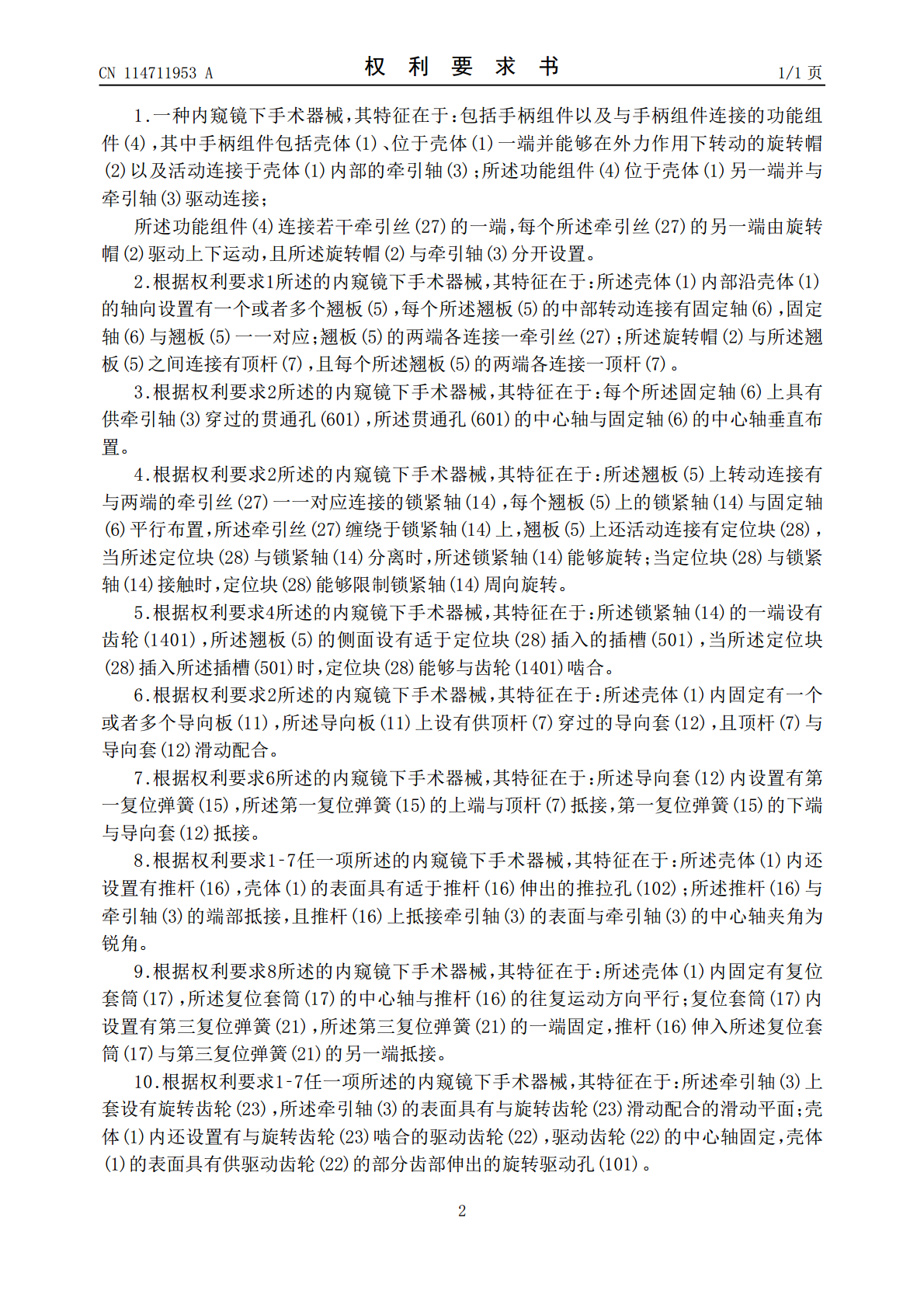
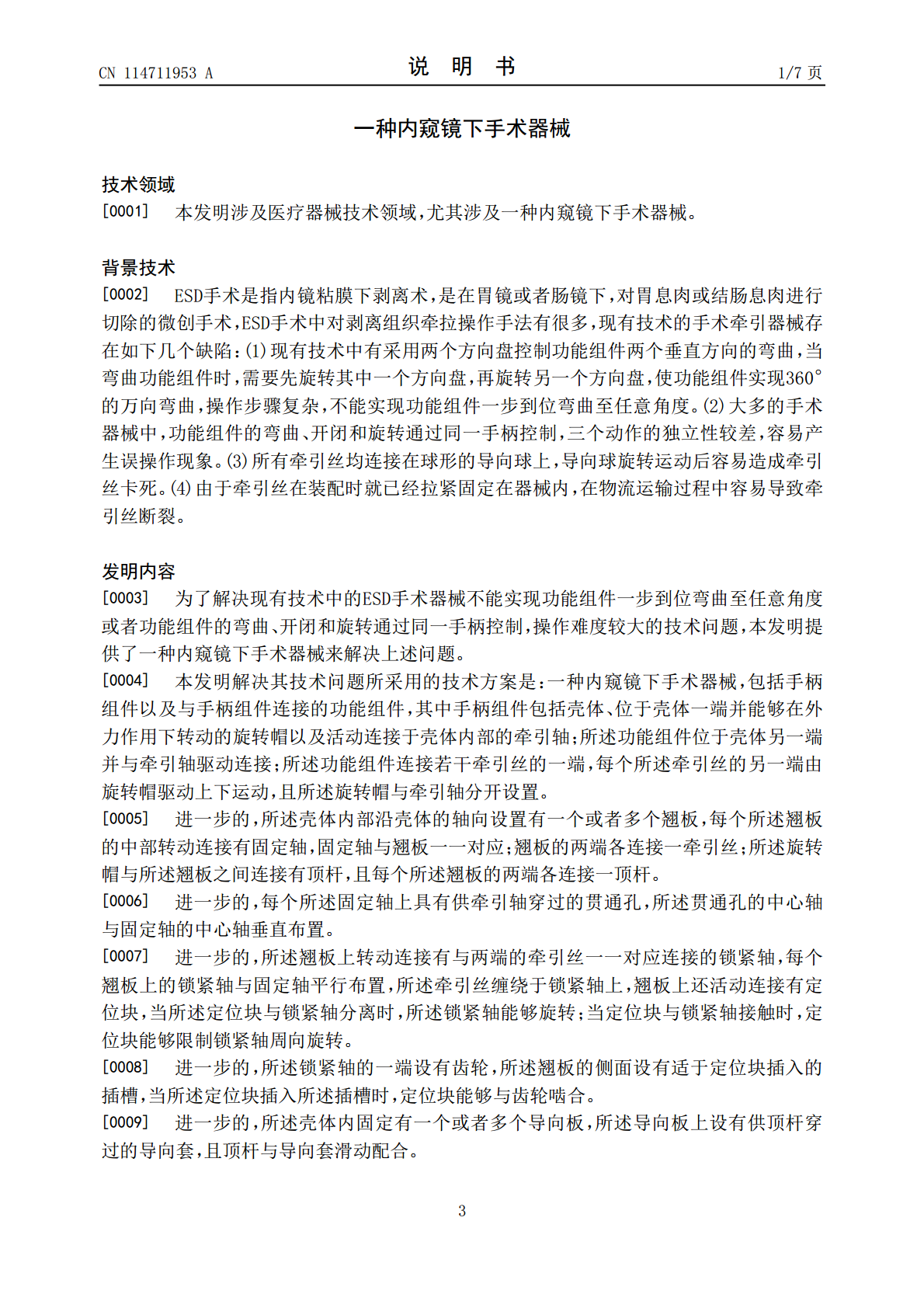
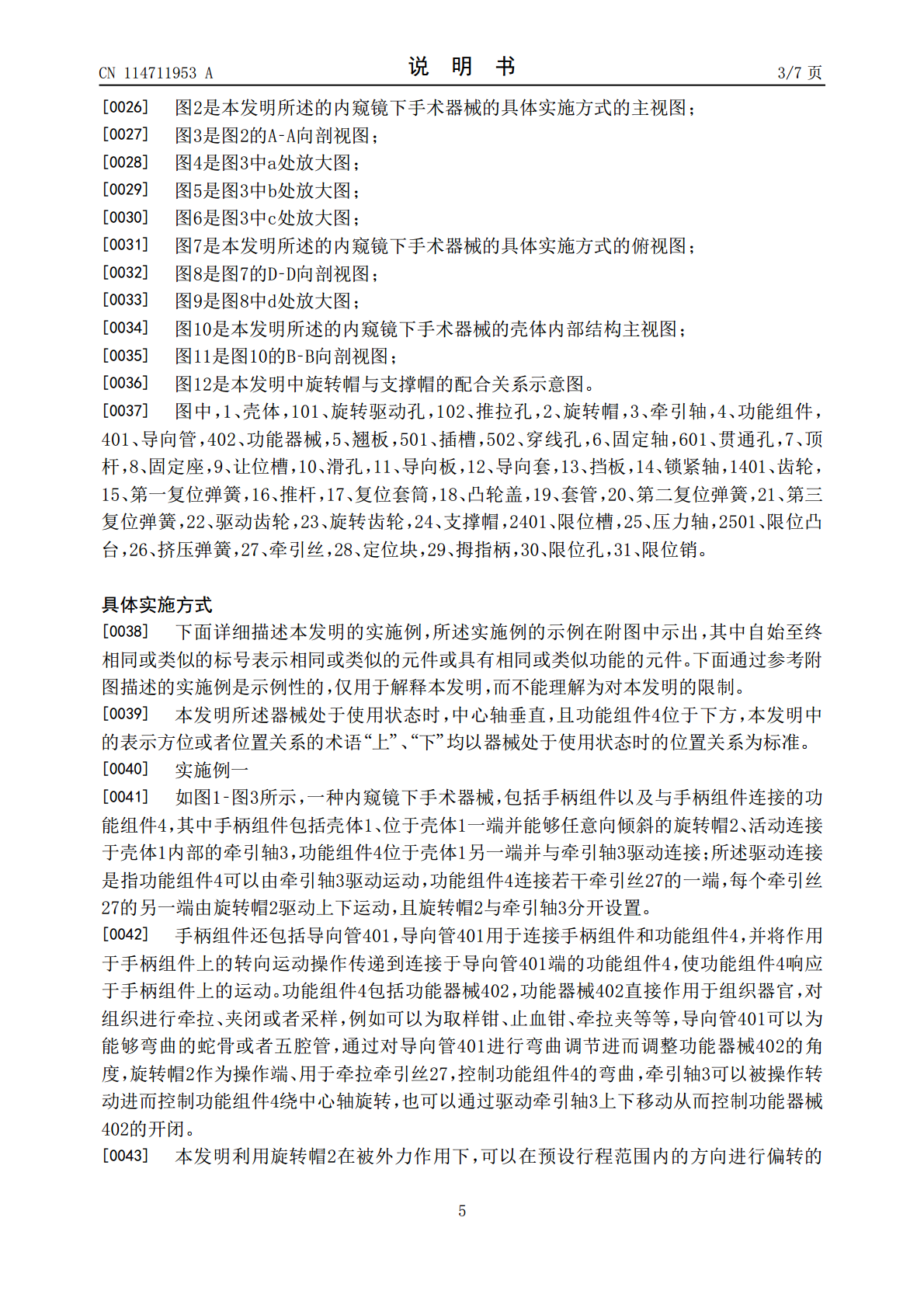
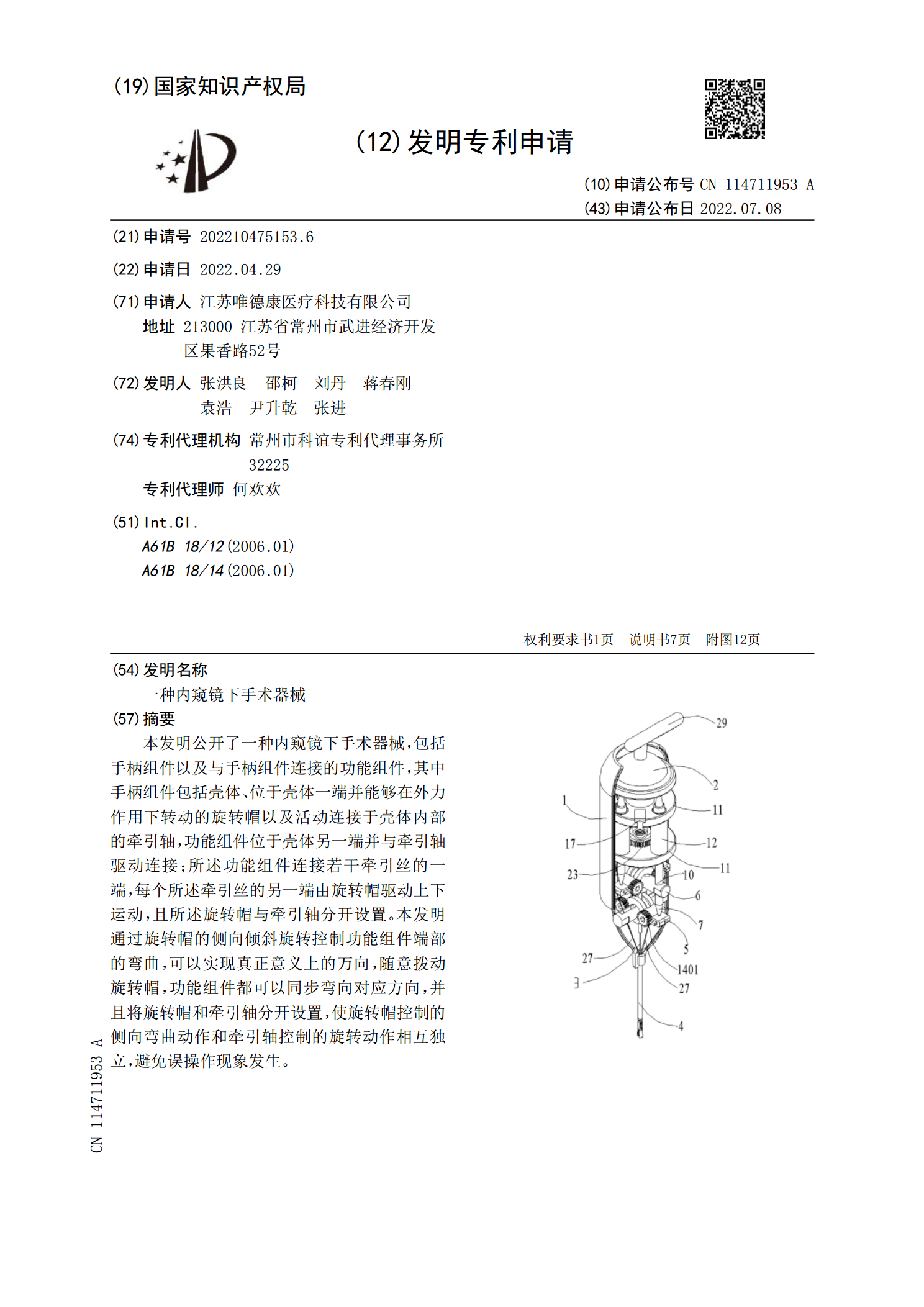
本发明公开了一种内窥镜下手术器械,包括手柄组件以及与手柄组件连接的功能组件,其中手柄组件包括壳体、位于壳体一端并能够在外力作用下转动的旋转帽以及活动连接于壳体内部的牵引轴,功能组件位于壳体另一端并与牵引轴驱动连接;所述功能组件连接若干牵引丝的一端,每个所述牵引丝的另一端由旋转帽驱动上下运动,且所述旋转帽与牵引轴分开设置。本发明通过旋转帽的侧向倾斜旋转控制功能组件端部的弯曲,可以实现真正意义上的万向,随意拨动旋转帽,功能组件都可以同步弯向对应方向,并且将旋转帽和牵引轴分开设置,使旋转帽控制的侧向弯曲动作和牵

一种内窥镜下量尺.pdf
本发明涉及一种内窥镜下量尺,包括操作部、连接管和测量管,所述操作部和测量管之间设置有连接管,所述测量管为可伸缩的测量管,测量管的外表面均匀设置有刻度线,连接管靠近测量管的一端外侧设置有转动套,转动套的一侧边设置有可调节测量管倾斜角度的过渡板。本发明的有益效果:可以调节测量管的倾斜角度和转动角度,进而提高测量的精度和效率。

手术机器人用蛇形关节、手术器械及内窥镜.pdf
本发明提供了一种手术机器人用蛇形关节,包括至少一个关节接头对以及柔性结构,每个关节接头对的第一关节接头包括第一球面,第一球面上设置有第一啮合机构,每个关节接头对的第二关节接头包括第二球面,第二球面上设置有第二啮合机构,第一啮合机构和第二啮合机构相啮合,所述柔性结构控制所述关节接头对的摆动方向和摆动角度,实现所述蛇形关节的摆动。采用球面作为关节接头对摆动时的支撑结构,提高了蛇形关节的承载能力;通过啮合机构的啮合运动实现关节接头对的摆动,提高啮合机构的啮合精度,可以实现蛇形关节的高弯曲精度。在本发明提供的手术

一种内窥镜下结扎线圈输送系统.pdf
一种内窥镜下结扎线圈输送系统,由输送器及配合使用的结扎线圈组成。所述输送器由牵引钩、连接管、牵引丝、助推管、弹簧管、手柄、外鞘管、硅胶管、推管组成,牵引钩、连接管、牵引丝、助推管、手柄的把手依次相连形成输送部件,弹簧管与手柄的滑杆扣相连接形成输送外管,硅胶管、外鞘管、推管依次相连形成输送器辅助管,输送器辅助管通过移动推管可以在弹簧管表面移动。所述结扎线圈由结扎圈、套管、拉环组成。所述内窥镜下结扎线圈输送系统,通过手柄中的把手在滑杆上下滑动,控制助推管和牵引丝前后运动,实现牵引钩前后移动,牵引钩勾取拉环,最
一种内窥镜下用穿孔缝合器.pdf
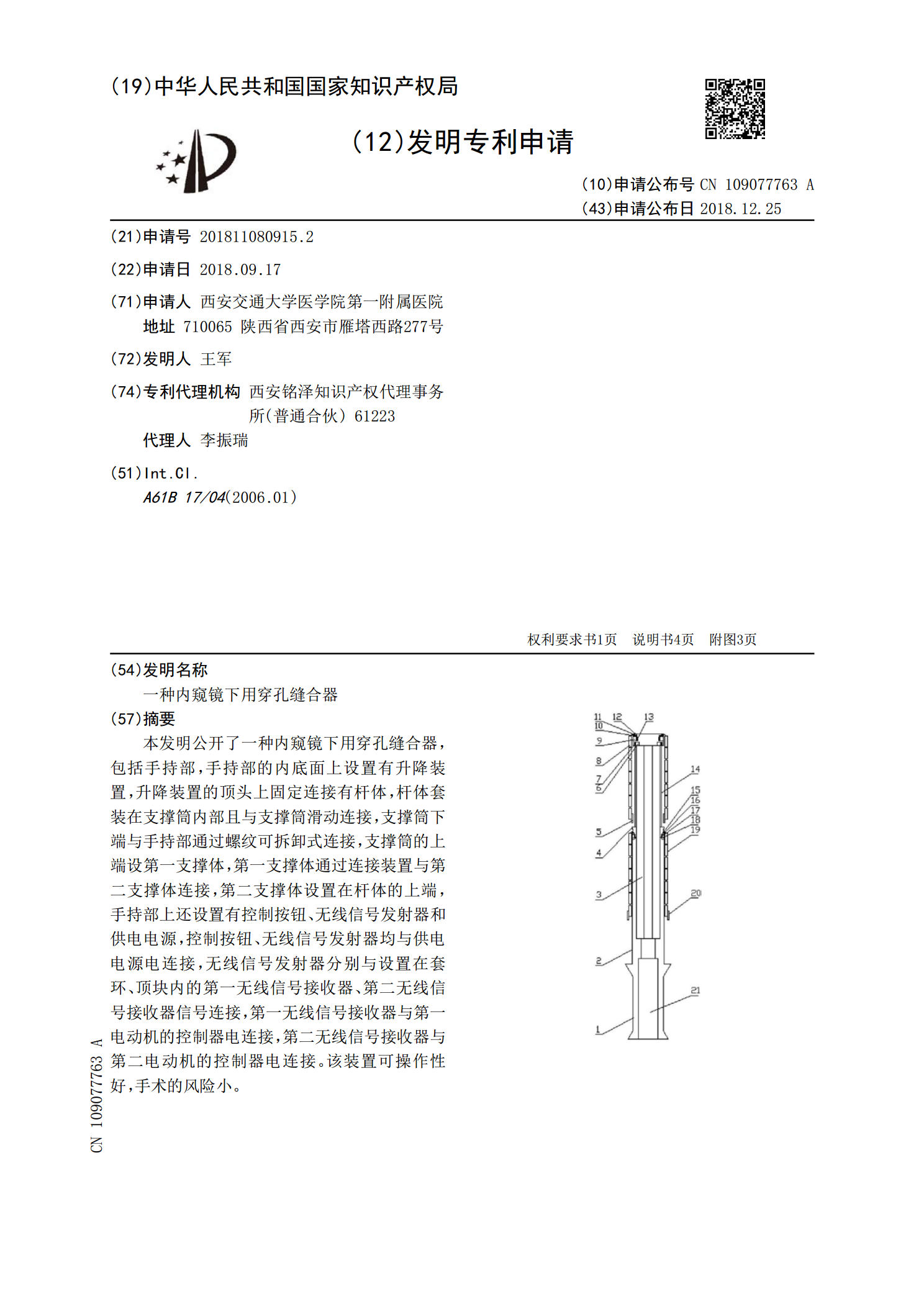
本发明公开了一种内窥镜下用穿孔缝合器,包括手持部,手持部的内底面上设置有升降装置,升降装置的顶头上固定连接有杆体,杆体套装在支撑筒内部且与支撑筒滑动连接,支撑筒下端与手持部通过螺纹可拆卸式连接,支撑筒的上端设第一支撑体,第一支撑体通过连接装置与第二支撑体连接,第二支撑体设置在杆体的上端,手持部上还设置有控制按钮、无线信号发射器和供电电源,控制按钮、无线信号发射器均与供电电源电连接,无线信号发射器分别与设置在套环、顶块内的第一无线信号接收器、第二无线信号接收器信号连接,第一无线信号接收器与第一电动机的控制器