
微型涡喷飞行器系统设计和控制方法研究.pdf

文库****品店

1/8
2/8

3/8
4/8

5/8
6/8
7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

微型涡喷飞行器系统设计和控制方法研究.pdf
微型涡喷飞行器系统设计和控制方法探究本文主要探究微型涡喷飞行器系统的设计和控制方法。起首详尽介绍了微型涡喷飞行器的基本构造和工作原理,然后针对设计和控制问题,提出了一系列优化措施和算法。其中包括控制器设计方法、PID参数优化、轨迹规划和模型猜测控制等。最后通过仿真和试验验证了所提出方法的有效性和优越性。关键词:微型涡喷飞行器;控制器设计;参数优化;轨迹规划;模型猜测控制。第一章:绪论1.1探究背景微型涡喷飞行器是一种新型的微型空中机器人,主要应用于环境监测、生灾救援、安全控制等领域。相比传统的固定翼或旋翼
涡喷式多轴飞行器及其控制方法.pdf
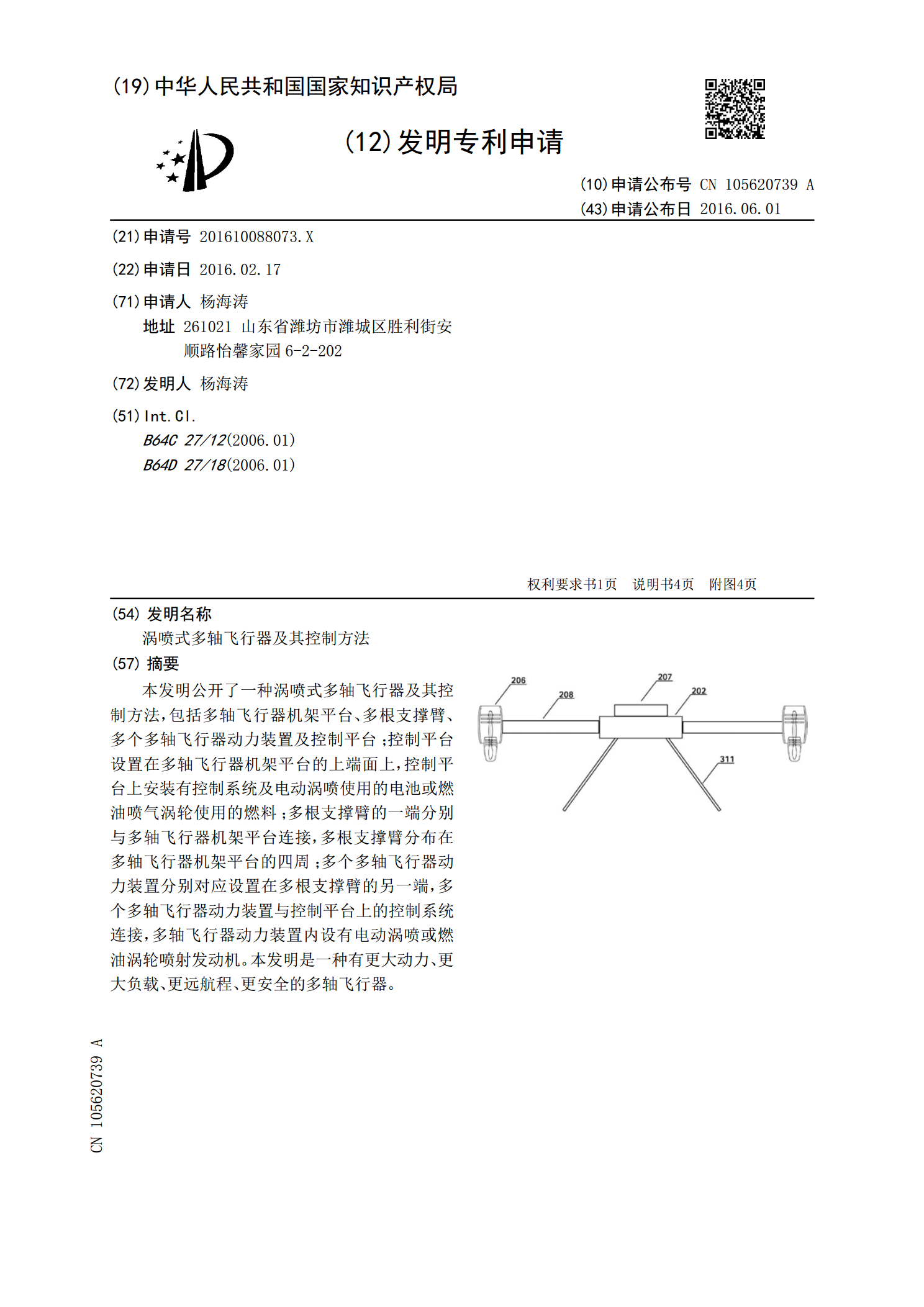
本发明公开了一种涡喷式多轴飞行器及其控制方法,包括多轴飞行器机架平台、多根支撑臂、多个多轴飞行器动力装置及控制平台;控制平台设置在多轴飞行器机架平台的上端面上,控制平台上安装有控制系统及电动涡喷使用的电池或燃油喷气涡轮使用的燃料;多根支撑臂的一端分别与多轴飞行器机架平台连接,多根支撑臂分布在多轴飞行器机架平台的四周;多个多轴飞行器动力装置分别对应设置在多根支撑臂的另一端,多个多轴飞行器动力装置与控制平台上的控制系统连接,多轴飞行器动力装置内设有电动涡喷或燃油涡轮喷射发动机。本发明是一种有更大动力、更大负载

微型涵道飞行器的设计与控制研究.pptx
微型涵道飞行器的设计与控制研究目录添加目录项标题微型涵道飞行器概述涵道飞行器的定义与分类微型涵道飞行器的特点与优势微型涵道飞行器的研究背景与意义微型涵道飞行器设计微型涵道飞行器的结构设计微型涵道飞行器的材料选择微型涵道飞行器的制造工艺微型涵道飞行器的性能评估微型涵道飞行器控制研究微型涵道飞行器的控制系统设计微型涵道飞行器的控制算法研究微型涵道飞行器的姿态控制研究微型涵道飞行器的导航与定位技术研究微型涵道飞行器实验验证实验设备与环境搭建微型涵道飞行器实验结果分析微型涵道飞行器性能优化研究实验结论与改进方向总

微型涵道飞行器的设计与控制研究.docx
微型涵道飞行器的设计与控制研究摘要:本文介绍了微型涵道飞行器(MAV)的设计和控制。MAV是一种轻便机器,非常适合执行各种任务,如监视和搜索等。本文首先介绍了MAV的概念和其重要性。接着,我们介绍MAV的设计方案,其中包括机身、涵道和推进系统的设计。最后,我们探讨了MAV的控制方法,包括姿态控制、位置控制和轨迹跟踪等。本文的研究结果表明,MAV是一种非常有用和具有潜力的飞行器,为实现各种任务提供了可行性。关键词:微型涵道飞行器;设计;控制一、引言微型涵道飞行器(MAV)是一种小型飞机,其尺寸通常不超过15
四旋翼微型飞行器控制系统设计.pdf
万方数据匪至蔓亘受至困:兰羔兰墨茎兰兰;茎篁二釜釜四旋翼微型飞行器控制系统设计:丝:杨明志1,王敏2MiniFour—rotorn州controlDesignofFlightControlSystemforRotorcraftMingzhil。Wang2.College引言1设计和功能(I.南京航空航天大学自动化学院,江苏南京210016;2.安徽师范大学数学计算机学院,安徽芜湖Min2University,Wuhu由于微型飞行器在军事和民用领域具有广阔的应用前景,近年来,众多的科学家致力于微型飞行器的研