
线控转向前轮转角控制策略研究.pdf

as****16


1/4

2/4

3/4

4/4
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

线控转向前轮转角控制策略研究.pdf
线控转向前轮转角控制策略研究Researchoncontrolstrategyoffrontcornerofsteer-by-wirevehicle胡乐乐1,时岩1,蔡焱焱2,李桂银1,陈佼1HULe-le1,SHIYan1,CAIYan-yan2,LIGui-yin1,CHENJiao1(1.南京理工大学机械工程学院,南京210094;2.山东理工大学交通与车辆工程学院,淄博255049)摘要:针对线控转向技术中汽车高速转向的稳定性问题,采用基于理想传动比的前馈和基于状态跟踪的反馈补偿的控制策略对前轮转

线控转向系统前轮主动转向控制策略研究.docx
线控转向系统前轮主动转向控制策略研究线控转向系统前轮主动转向控制策略研究摘要:线控转向系统是一种通过电子控制增加或减少前轮转向角度,以提高汽车操控性和行驶稳定性的一种智能驾驶辅助系统。本文对线控转向系统的前轮主动转向控制策略进行了研究。通过分析传统转向系统的不足以及前轮主动转向系统的优势,提出了前轮主动转向系统的应用前景及控制策略的关键技术。研究结果表明,通过合理的控制策略,前轮主动转向系统能够有效改善汽车的操控性能和行驶稳定性,使驾驶体验更加舒适和安全。关键词:线控转向系统,前轮主动转向,控制策略,操控

四轮线控转向叉车的转向控制策略研究.docx
四轮线控转向叉车的转向控制策略研究一、引言叉车作为一种非常常见的物流设备,在现代物流行业中扮演着非常重要的角色。在叉车的发展史中,四轮线控转向叉车是一种比较常见的型号,它采用了线控技术实现了转向操作。然而,在实际操作中,由于复杂的工作环境和操作要求,线控叉车的转向控制存在一定的困难。本文在总结现有文献研究的基础上,从算法设计、控制实现、实验仿真等方面,对四轮线控转向叉车的转向控制策略进行了研究,以期提高线控叉车的转向精度和效率。二、算法设计线控叉车的转向控制采用了DC电机控制技术,根据电机输入信号的不同,

基于线控转向的主动前轮转向技术研究的任务书.docx
基于线控转向的主动前轮转向技术研究的任务书一、研究背景随着汽车产业的不断发展和改进,车辆安全性能也得到了很大的提升,而主动前轮转向技术则是这些技术创新之一。该技术能够通过线控转向来实现车辆前轮转向,使得车辆转向更加灵活且更为稳定。虽然这种技术进展很快,但是目前还存在一些问题需要进一步研究。二、研究目标1.分析当前主动前轮转向技术的存在问题,研究关键技术,并探讨最优解决方案。2.设计主动前轮转向控制系统,提高车辆转向的稳定性和精度。3.构建实验室模型验证设计方案的可行性,并优化系统性能。三、研究内容1.分析
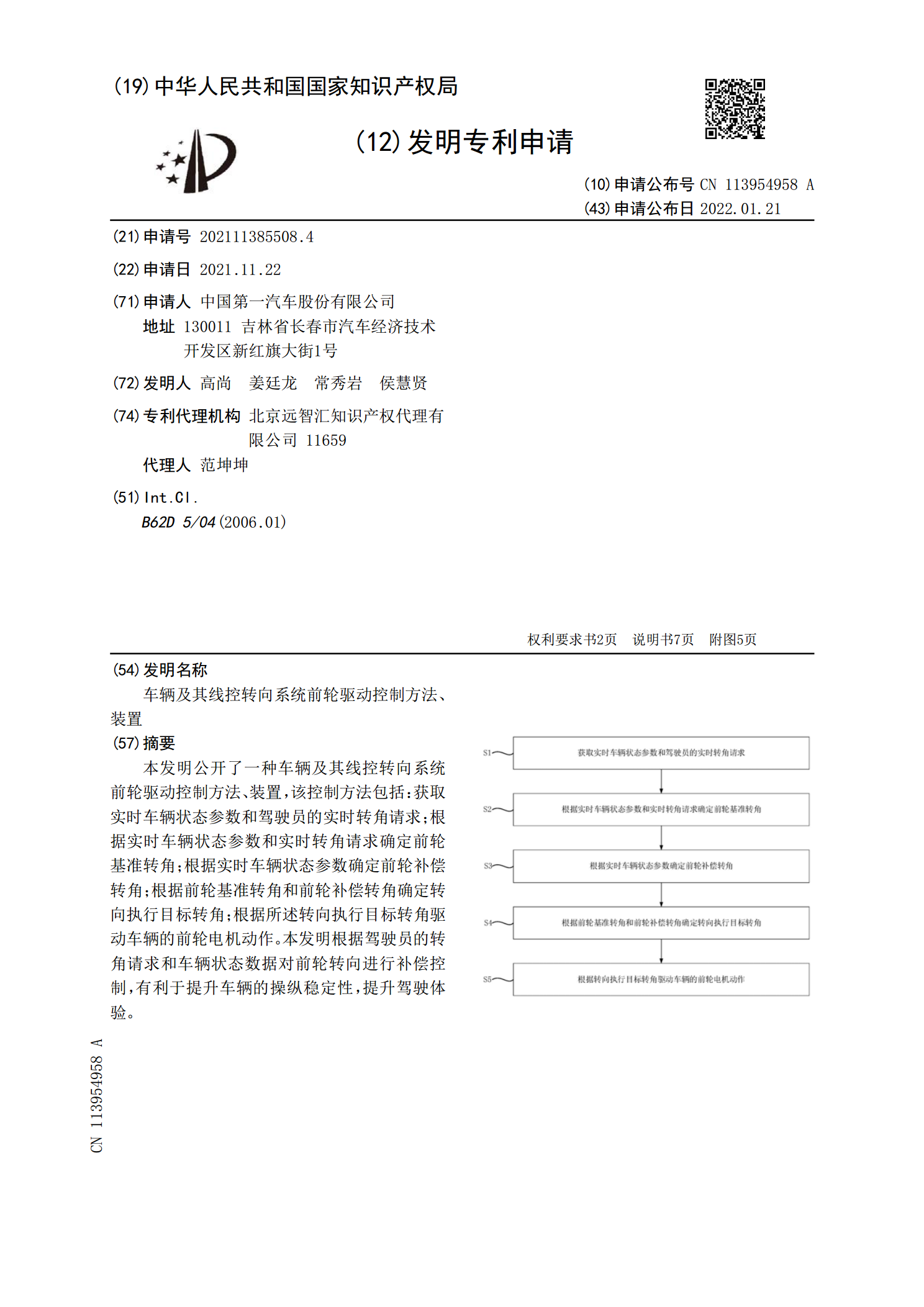
车辆及其线控转向系统前轮驱动控制方法、装置.pdf
本发明公开了一种车辆及其线控转向系统前轮驱动控制方法、装置,该控制方法包括:获取实时车辆状态参数和驾驶员的实时转角请求;根据实时车辆状态参数和实时转角请求确定前轮基准转角;根据实时车辆状态参数确定前轮补偿转角;根据前轮基准转角和前轮补偿转角确定转向执行目标转角;根据所述转向执行目标转角驱动车辆的前轮电机动作。本发明根据驾驶员的转角请求和车辆状态数据对前轮转向进行补偿控制,有利于提升车辆的操纵稳定性,提升驾驶体验。