
尺寸可变式雾滴空间沉积量测试装置及方法.pdf

猫巷****觅蓉

1/10
2/10
3/10

4/10

5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
尺寸可变式雾滴空间沉积量测试装置及方法.pdf
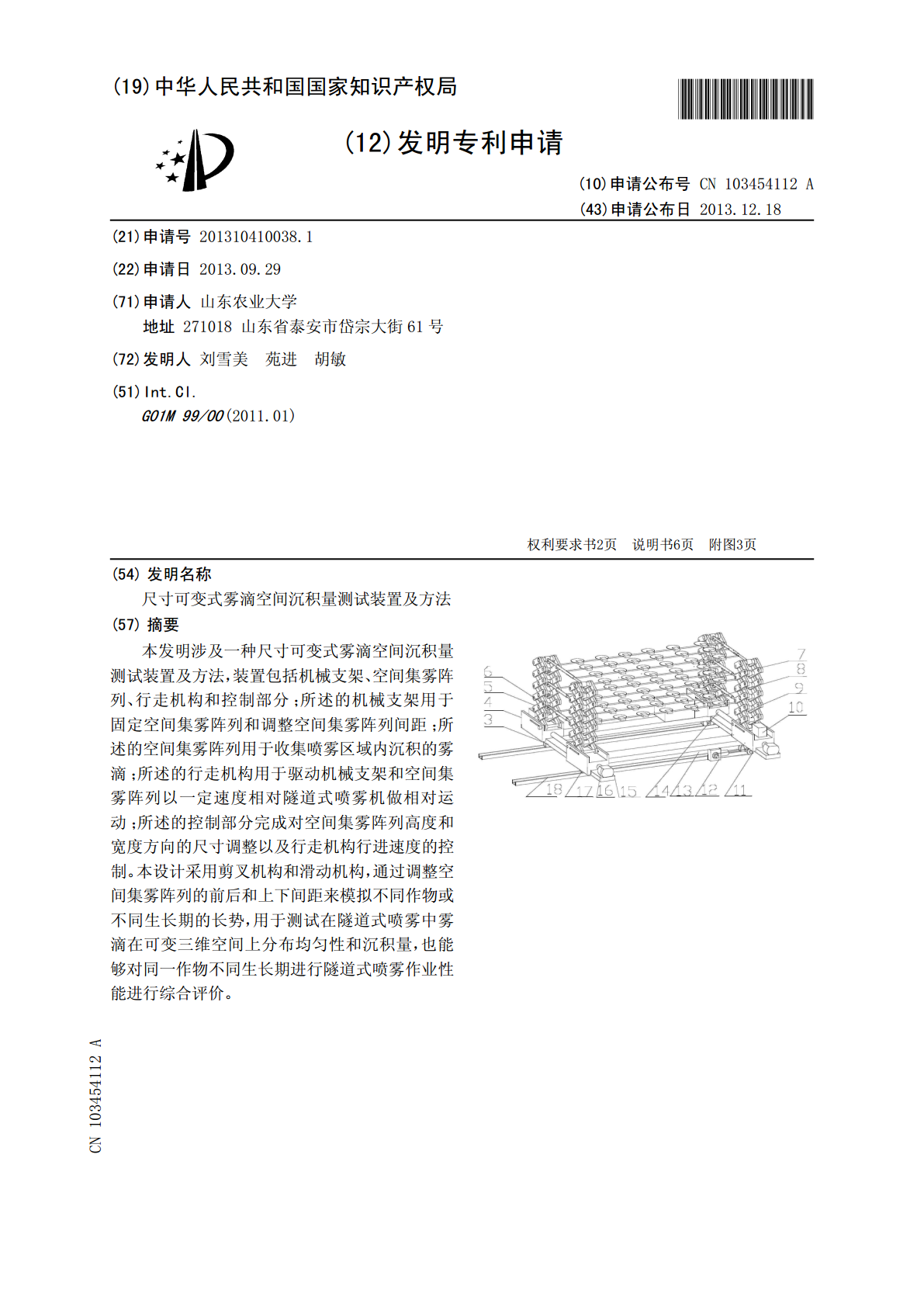
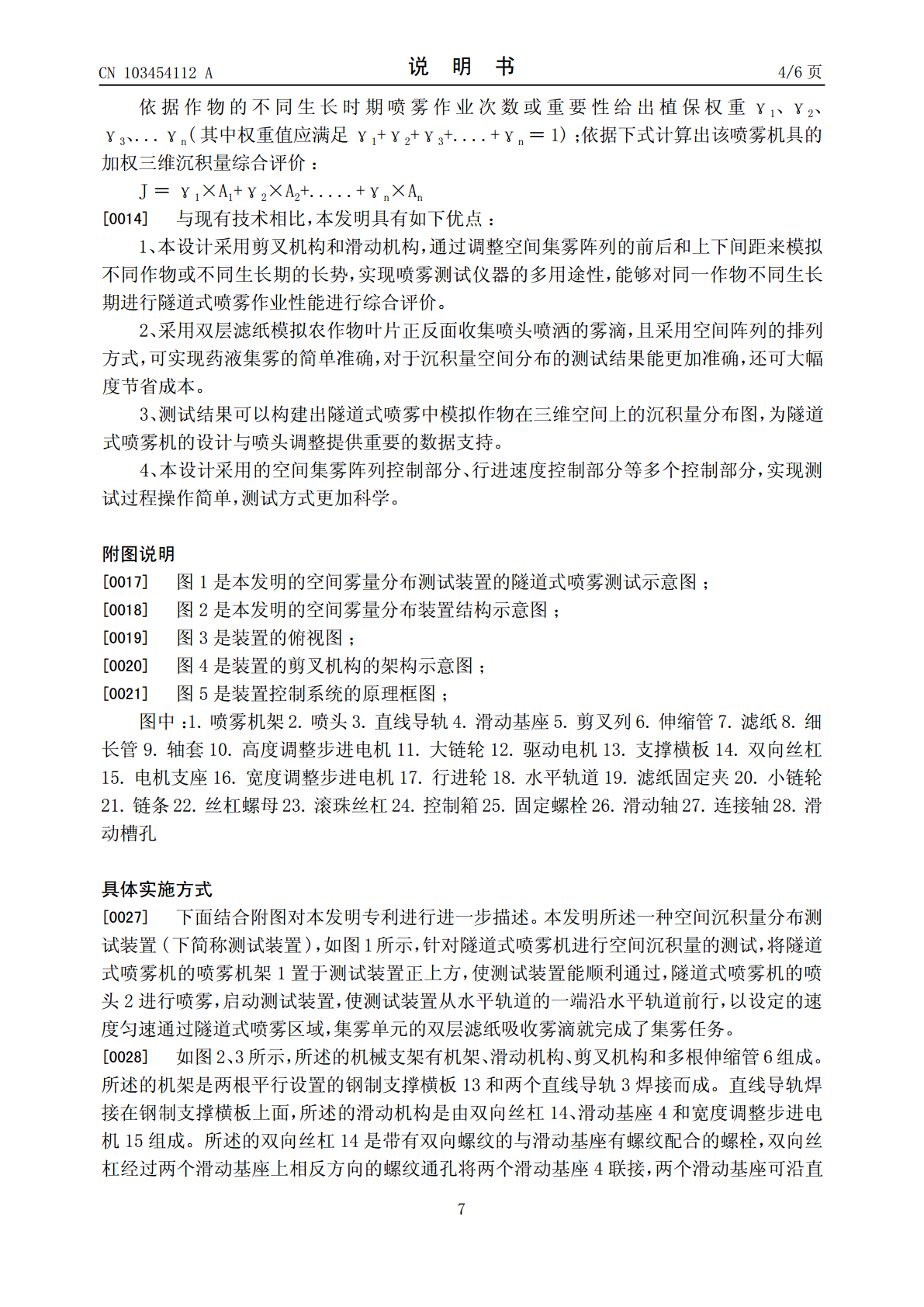
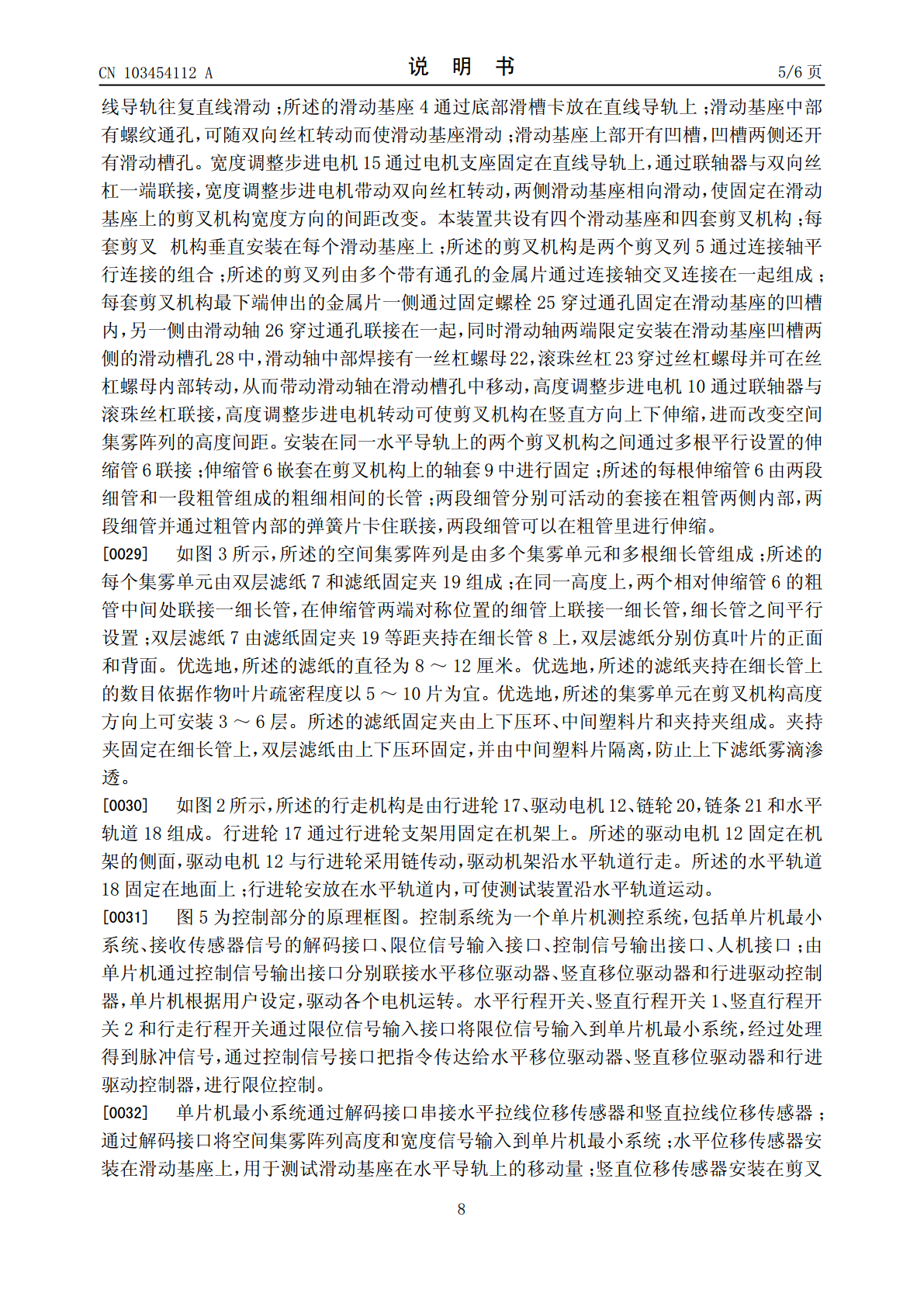
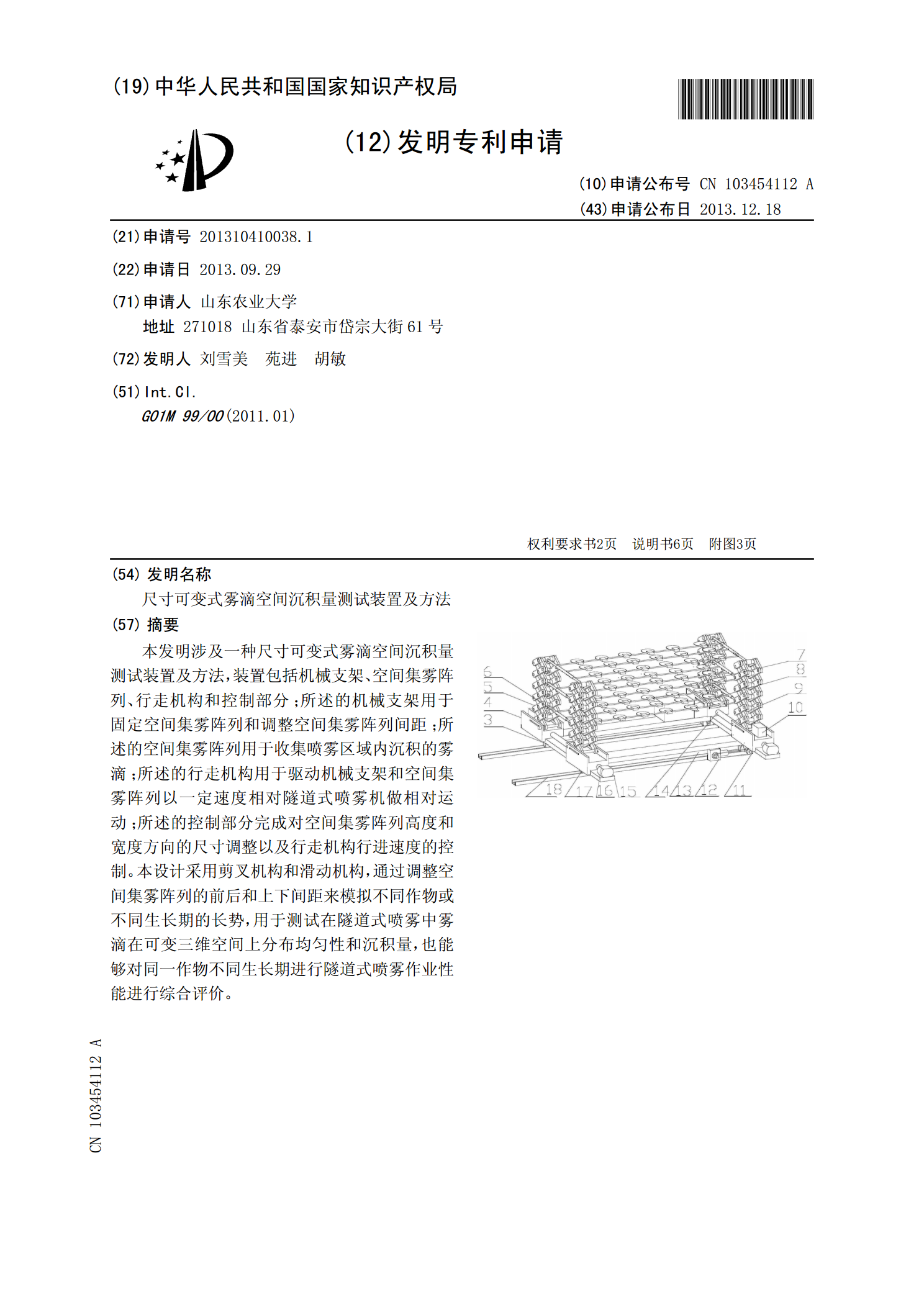
本发明涉及一种尺寸可变式雾滴空间沉积量测试装置及方法,装置包括机械支架、空间集雾阵列、行走机构和控制部分;所述的机械支架用于固定空间集雾阵列和调整空间集雾阵列间距;所述的空间集雾阵列用于收集喷雾区域内沉积的雾滴;所述的行走机构用于驱动机械支架和空间集雾阵列以一定速度相对隧道式喷雾机做相对运动;所述的控制部分完成对空间集雾阵列高度和宽度方向的尺寸调整以及行走机构行进速度的控制。本设计采用剪叉机构和滑动机构,通过调整空间集雾阵列的前后和上下间距来模拟不同作物或不同生长期的长势,用于测试在隧道式喷雾中雾滴在可变
雾滴沉积量测量方法、装置及系统.pdf
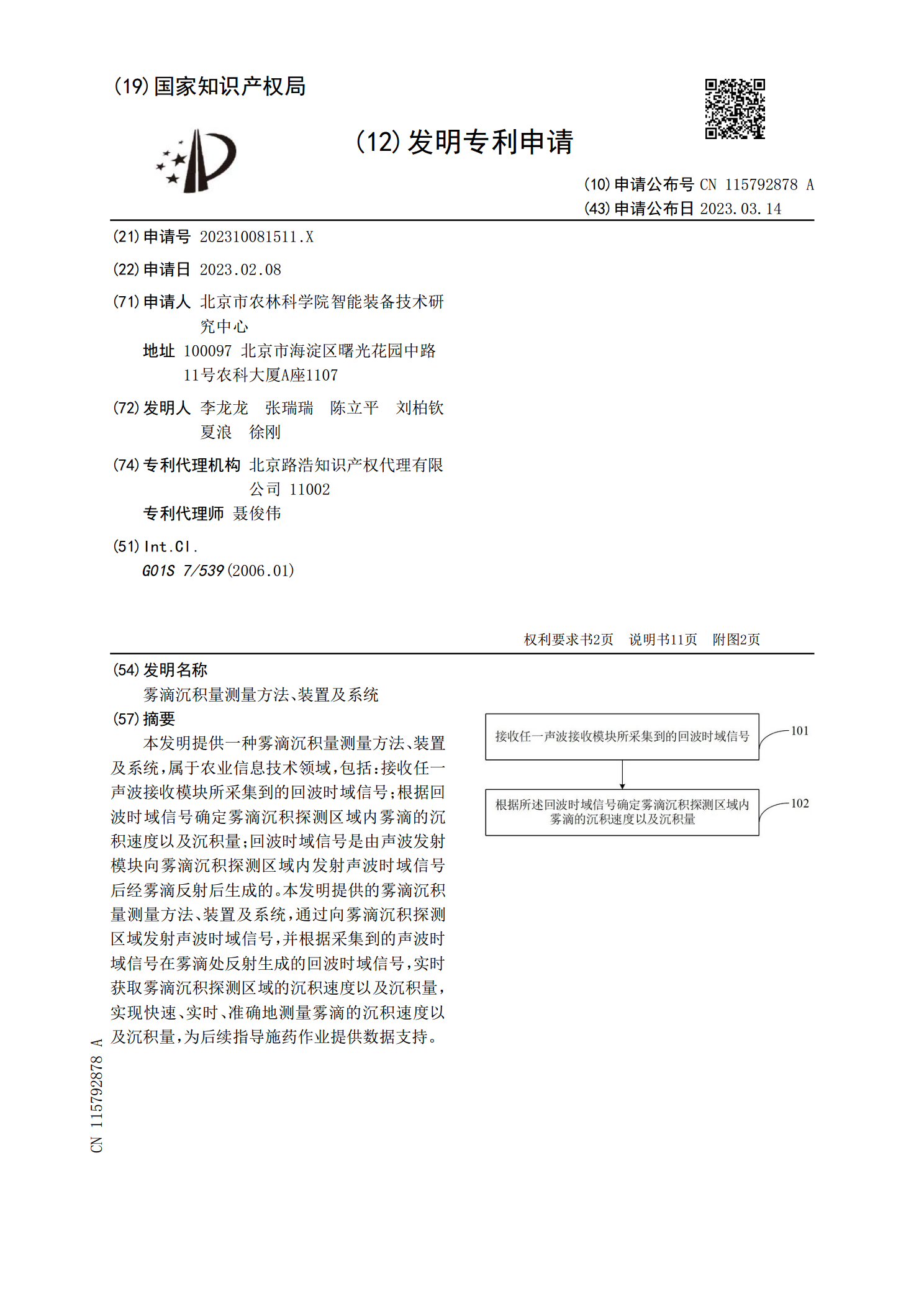
本发明提供一种雾滴沉积量测量方法、装置及系统,属于农业信息技术领域,包括:接收任一声波接收模块所采集到的回波时域信号;根据回波时域信号确定雾滴沉积探测区域内雾滴的沉积速度以及沉积量;回波时域信号是由声波发射模块向雾滴沉积探测区域内发射声波时域信号后经雾滴反射后生成的。本发明提供的雾滴沉积量测量方法、装置及系统,通过向雾滴沉积探测区域发射声波时域信号,并根据采集到的声波时域信号在雾滴处反射生成的回波时域信号,实时获取雾滴沉积探测区域的沉积速度以及沉积量,实现快速、实时、准确地测量雾滴的沉积速度以及沉积量,为

测量雾滴沉积分布情况的方法、装置和系统.pdf
本发明涉及一种测量雾滴沉积分布情况的方法、装置和系统,该方法包括:对雾滴喷射装置下方的区域进行照明;对未有雾滴下落时的照明区域进行拍摄,得到背景图像;对有雾滴下落时的照明区域进行拍摄,得到多张雾滴图像;将每一张所述雾滴图像减去所述背景图像,得到对应的粒子灰度图像;根据各张粒子灰度图像,确定所述照明区域的雾滴沉积量分布情况。本发明提供的测量雾滴沉积分布情况的方法、装置和系统,不会干扰到风场以及雾滴的运动,适用于小范围、长时间、大流量的喷雾试验,尤其适合对旋翼下洗气流影响下的雾滴沉积分布的分析。
一种载货量可变式工厂拖车装置.pdf
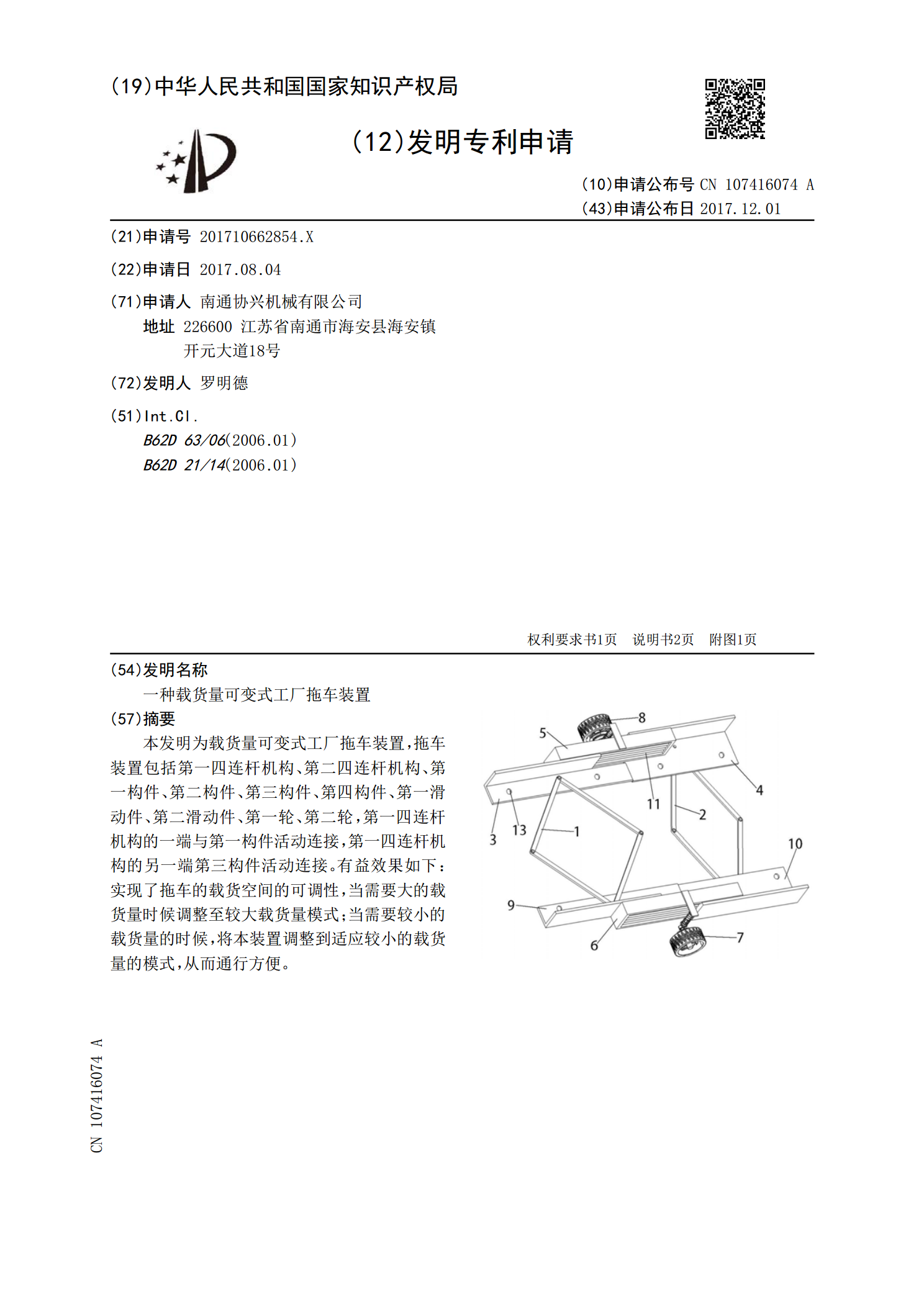
本发明为载货量可变式工厂拖车装置,拖车装置包括第一四连杆机构、第二四连杆机构、第一构件、第二构件、第三构件、第四构件、第一滑动件、第二滑动件、第一轮、第二轮,第一四连杆机构的一端与第一构件活动连接,第一四连杆机构的另一端第三构件活动连接。有益效果如下:实现了拖车的载货空间的可调性,当需要大的载货量时候调整至较大载货量模式;当需要较小的载货量的时候,将本装置调整到适应较小的载货量的模式,从而通行方便。
大尺寸空间的空间角度的测量装置及测量方法.pdf
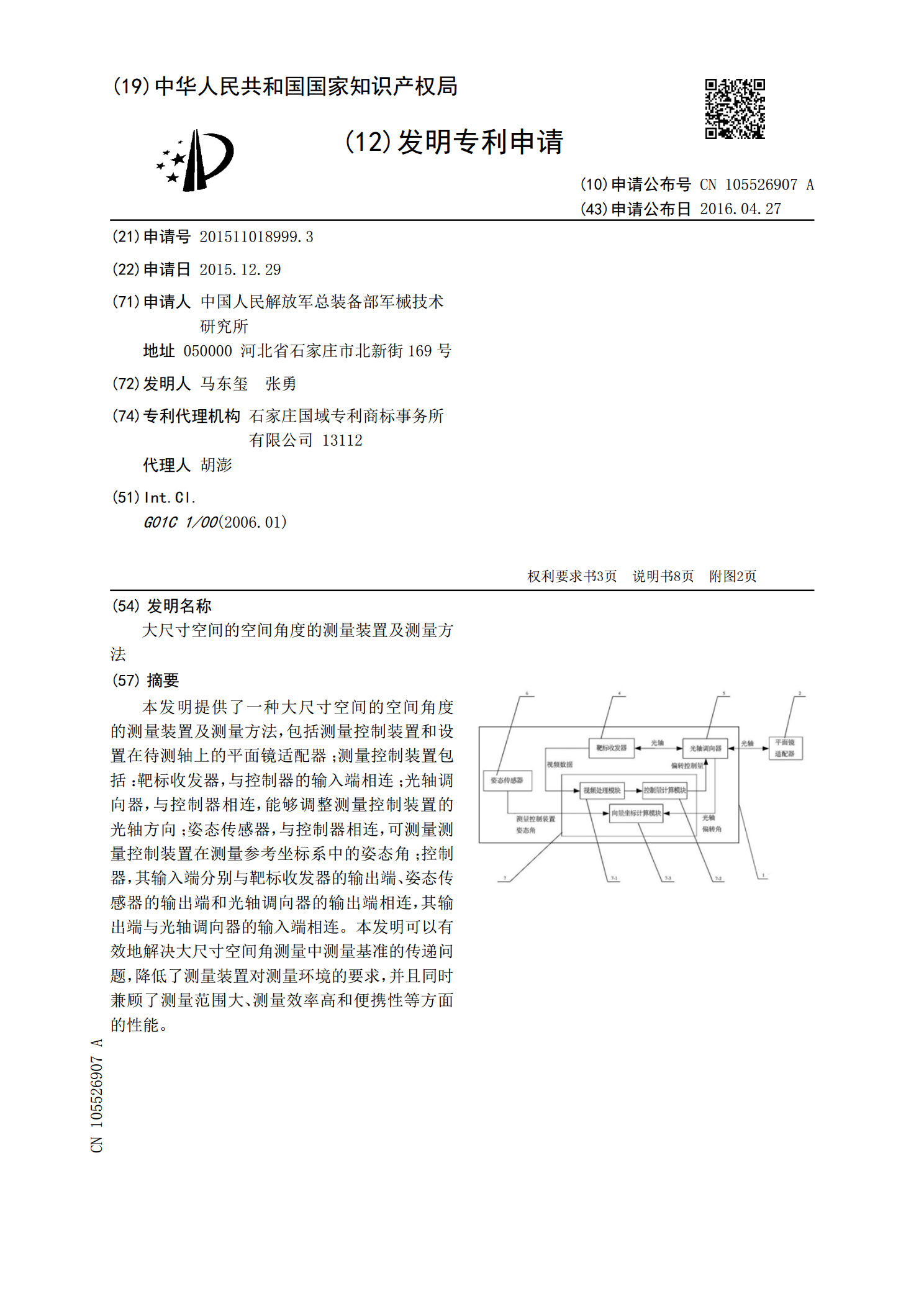
本发明提供了一种大尺寸空间的空间角度的测量装置及测量方法,包括测量控制装置和设置在待测轴上的平面镜适配器;测量控制装置包括:靶标收发器,与控制器的输入端相连;光轴调向器,与控制器相连,能够调整测量控制装置的光轴方向;姿态传感器,与控制器相连,可测量测量控制装置在测量参考坐标系中的姿态角;控制器,其输入端分别与靶标收发器的输出端、姿态传感器的输出端和光轴调向器的输出端相连,其输出端与光轴调向器的输入端相连。本发明可以有效地解决大尺寸空间角测量中测量基准的传递问题,降低了测量装置对测量环境的要求,并且同时兼顾