
基于物联网的蔬菜售卖机控制方法及装置.pdf

星星****眨眼


1/9

2/9
3/9
4/9
5/9

6/9

7/9

8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
基于物联网的蔬菜售卖机控制方法及装置.pdf
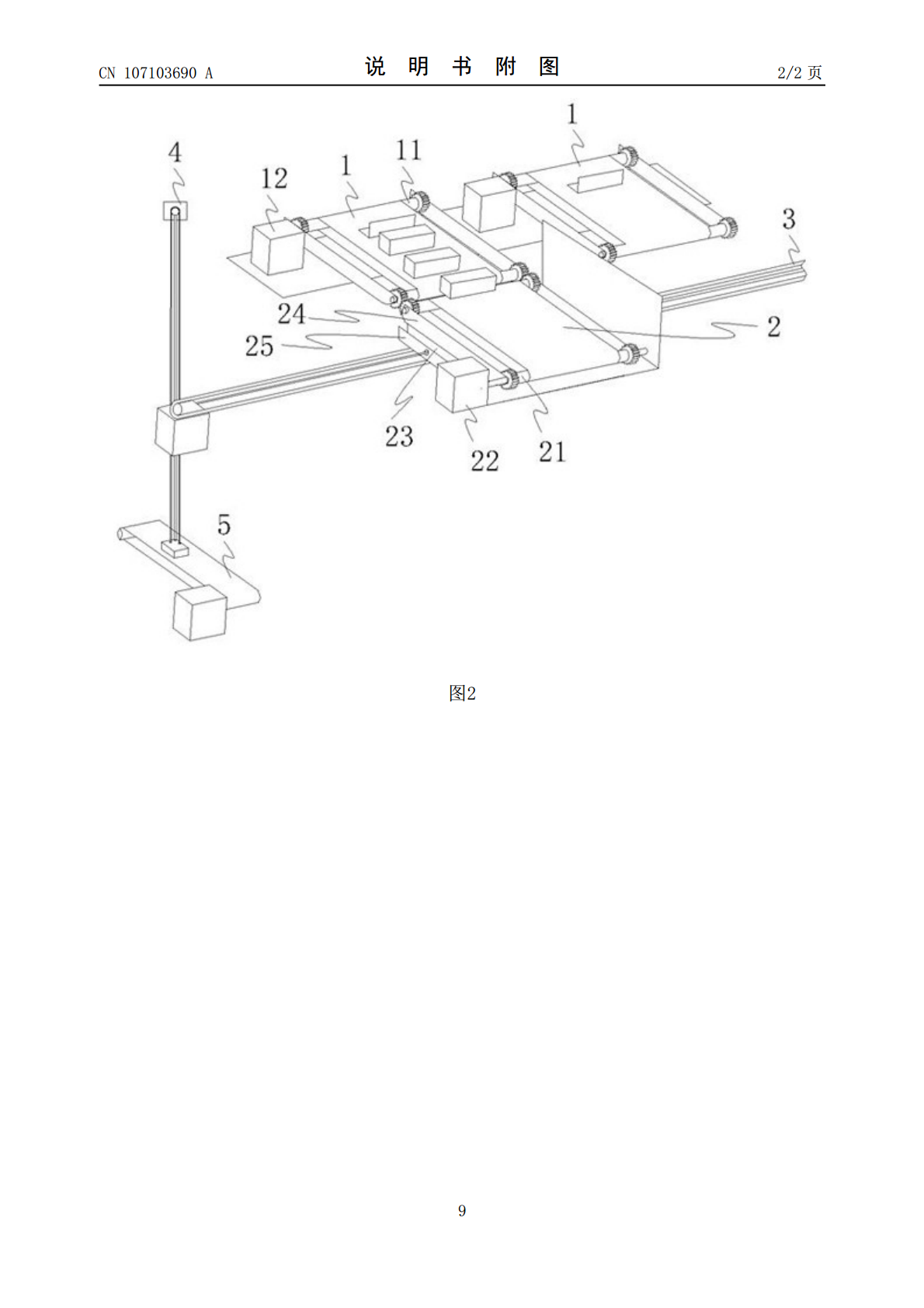
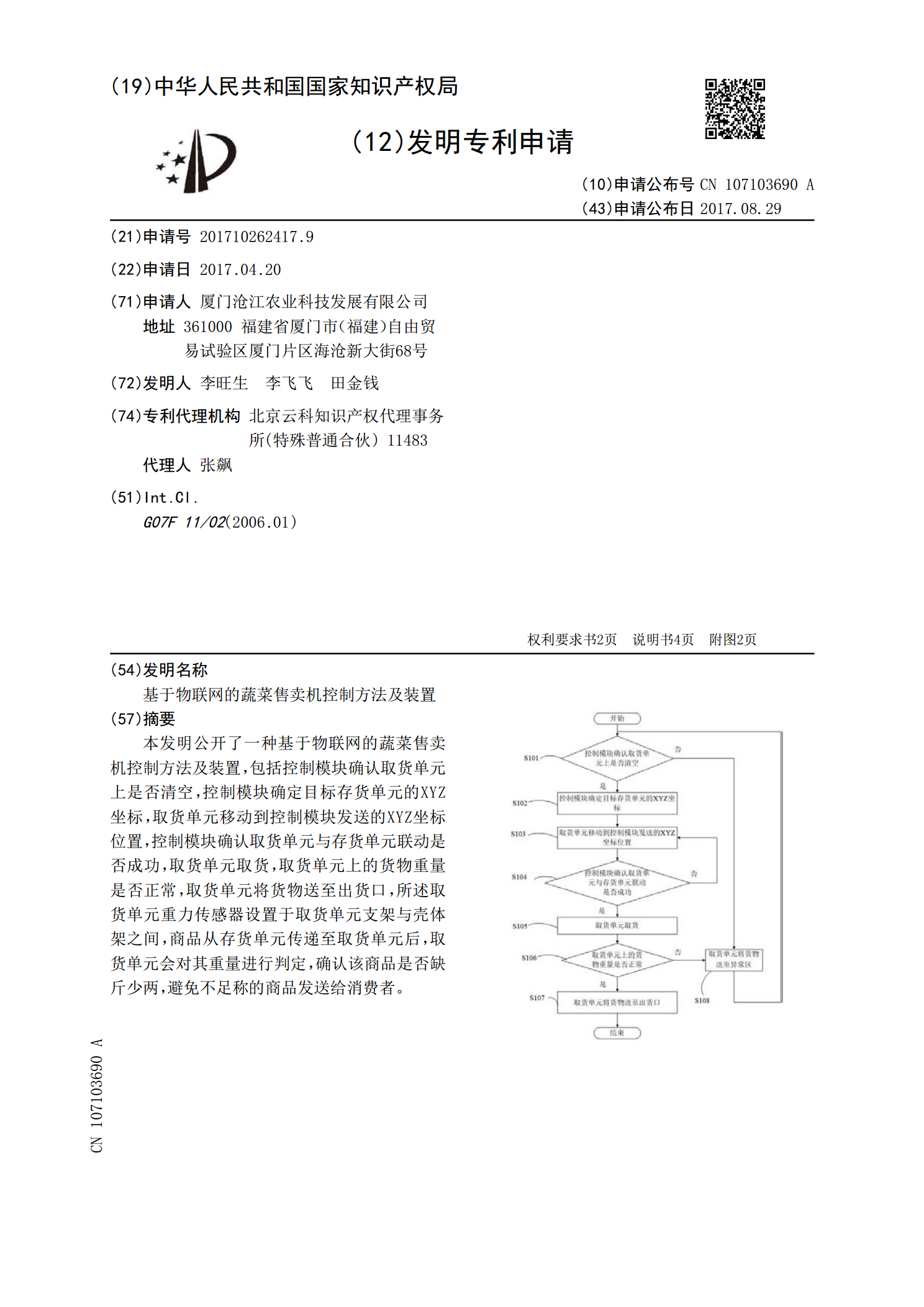
本发明公开了一种基于物联网的蔬菜售卖机控制方法及装置,包括控制模块确认取货单元上是否清空,控制模块确定目标存货单元的XYZ坐标,取货单元移动到控制模块发送的XYZ坐标位置,控制模块确认取货单元与存货单元联动是否成功,取货单元取货,取货单元上的货物重量是否正常,取货单元将货物送至出货口,所述取货单元重力传感器设置于取货单元支架与壳体架之间,商品从存货单元传递至取货单元后,取货单元会对其重量进行判定,确认该商品是否缺斤少两,避免不足称的商品发送给消费者。

基于物联网的车辆自动调度控制方法及装置.pdf
本发明公开了一种基于物联网的车辆自动调度控制方法及装置,该方法包括车辆调度服务器生成针对当前应用场景中乘车区域的车辆调度指令,并向蓄车区域对应的现场服务器发送车辆调度指令,以触发蓄车区域对应的现场服务器根据车辆调度指令执行车辆调度操作,或,向蓄车区域内数量大于等于车辆调度数量的车辆对应的终端设备车辆调度指令。可见,实施本发明能够自动直接向蓄车区域的车辆的终端设备发送车辆调度指令或者通过蓄车区域对应的现场服务器间接向车辆的终端设备发送车辆调度指令,使得驾驶员及时将车辆驾驶至乘车区域,从而提高车辆的调度效率及

基于物联网的买菜方法及装置.pdf
本发明提供了一种基于物联网的买菜方法及装置,所述方法包括,消费者打开移动端的买菜APP时,定位出消费者附近的无人生鲜柜;消费者在买菜APP上点击一家附近的无人生鲜柜时,将点击的无人生鲜柜的生鲜产品的产品信息展示在买菜APP的显示界面上;消费者扫描无人生鲜柜上的生鲜产品的二维码时,弹出一个购买确认界面,以供消费者进行付款购买;后台服务器接收到消费者的付款购买信息时,控制无人生鲜柜将对应的生鲜产品运送至取货口。本发明的有益效果在于:该买菜方法能够让消费者去附近的无人生鲜柜之前,就提前了解到无人生鲜柜是否有自己

一种基于物联网的自动售卖机出货方法.pdf
本发明涉及货物售卖的技术领域,特别是涉及一种基于物联网的自动售卖机出货方法,其用户在购买时可以多件多品类统一打包出货,当需要大量货物时,缩短用户等待时间,提高出货效率,降低使用局限性;包括:S1:对自动售卖机进行联网,并使其处于待机状态;S2:触发自动售卖机,自动售卖机远程获取系统订单并对系统订单全部货物进行拣取打包处理;S3:判定当下货物受理人员是否在场;S4:货物受理人员不在场,获取暂存空间内打包货物的数量,并发送取货凭证至货物受理人员客户端;S5:预设一固定值,判定获取的数量是否小于等于固定值;S6
基于物联网的灯光控制装置.pdf
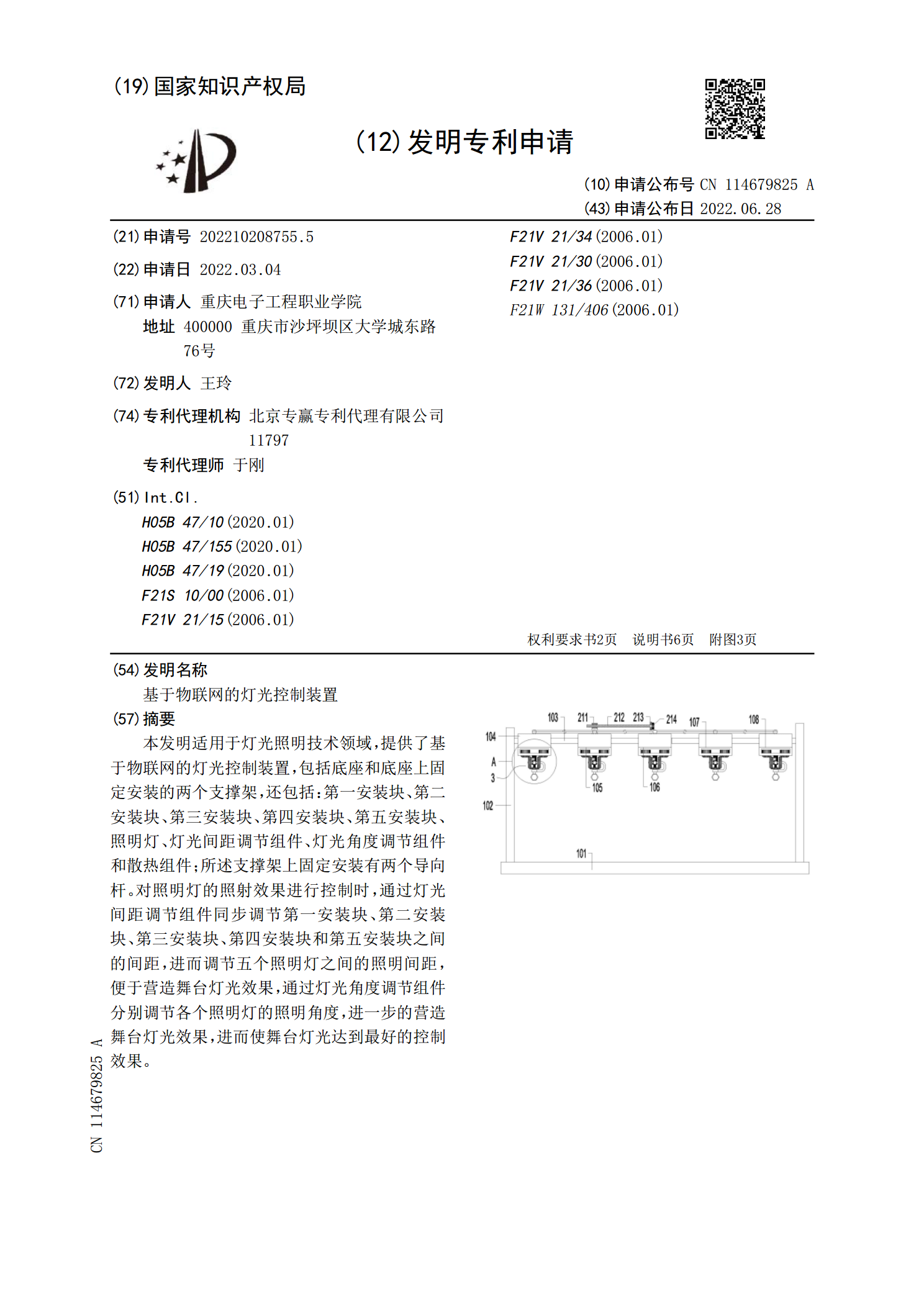
本发明适用于灯光照明技术领域,提供了基于物联网的灯光控制装置,包括底座和底座上固定安装的两个支撑架,还包括:第一安装块、第二安装块、第三安装块、第四安装块、第五安装块、照明灯、灯光间距调节组件、灯光角度调节组件和散热组件;所述支撑架上固定安装有两个导向杆。对照明灯的照射效果进行控制时,通过灯光间距调节组件同步调节第一安装块、第二安装块、第三安装块、第四安装块和第五安装块之间的间距,进而调节五个照明灯之间的照明间距,便于营造舞台灯光效果,通过灯光角度调节组件分别调节各个照明灯的照明角度,进一步的营造舞台灯光