
一种电控液压转向轮式拖拉机转向控制信号标定方法.pdf

是向****23

1/4

2/4

3/4

4/4
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种电控液压转向轮式拖拉机转向控制信号标定方法.pdf
本发明涉及一种电控液压转向轮式拖拉机转向控制信号标定方法,包括以下步骤:1)通过模拟量输出模块向电液比例控制器发送正极性模拟电压信号;2)控制信号从U
电控液压转向系统、汽车起重机、电控液压转向控制方法.pdf
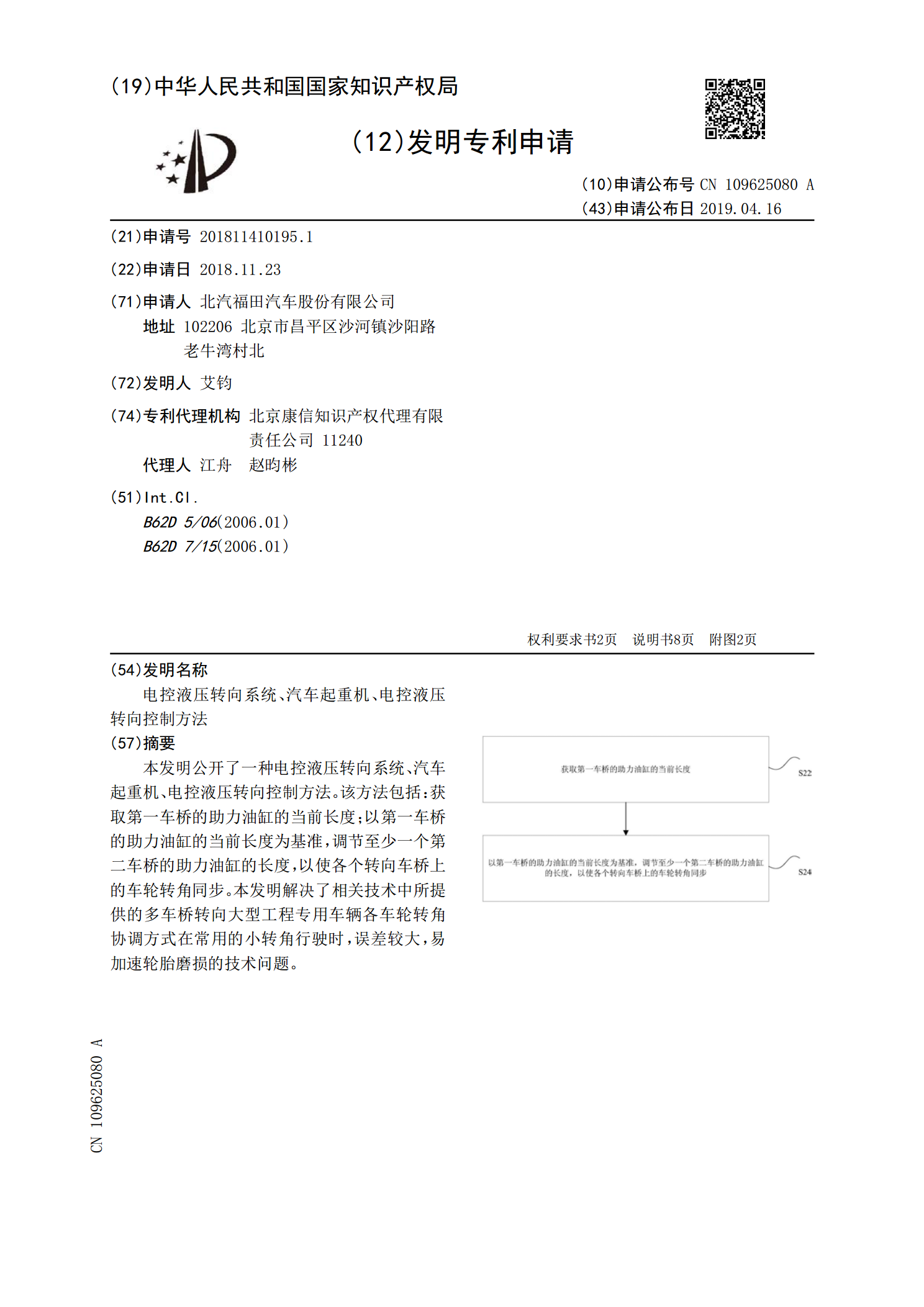
本发明公开了一种电控液压转向系统、汽车起重机、电控液压转向控制方法。该方法包括:获取第一车桥的助力油缸的当前长度;以第一车桥的助力油缸的当前长度为基准,调节至少一个第二车桥的助力油缸的长度,以使各个转向车桥上的车轮转角同步。本发明解决了相关技术中所提供的多车桥转向大型工程专用车辆各车轮转角协调方式在常用的小转角行驶时,误差较大,易加速轮胎磨损的技术问题。

一种液压自动转向系统标定方法.pdf
本发明公开了一种液压自动转向系统标定方法,其包括:步骤S1,测量电磁比例阀死区范围;步骤S2,电磁阀开度最大,测量转向车轮在液压缸作用下转动到极限位置的时间;步骤S3,让转向车轮在极限位置,测量车辆前进的速度和角速度的关系。本发明的方法可以检测液压自动转向系统的主要参数,校准转向控制器。
汽车后轮转向电控液压系统及其控制方法.pdf
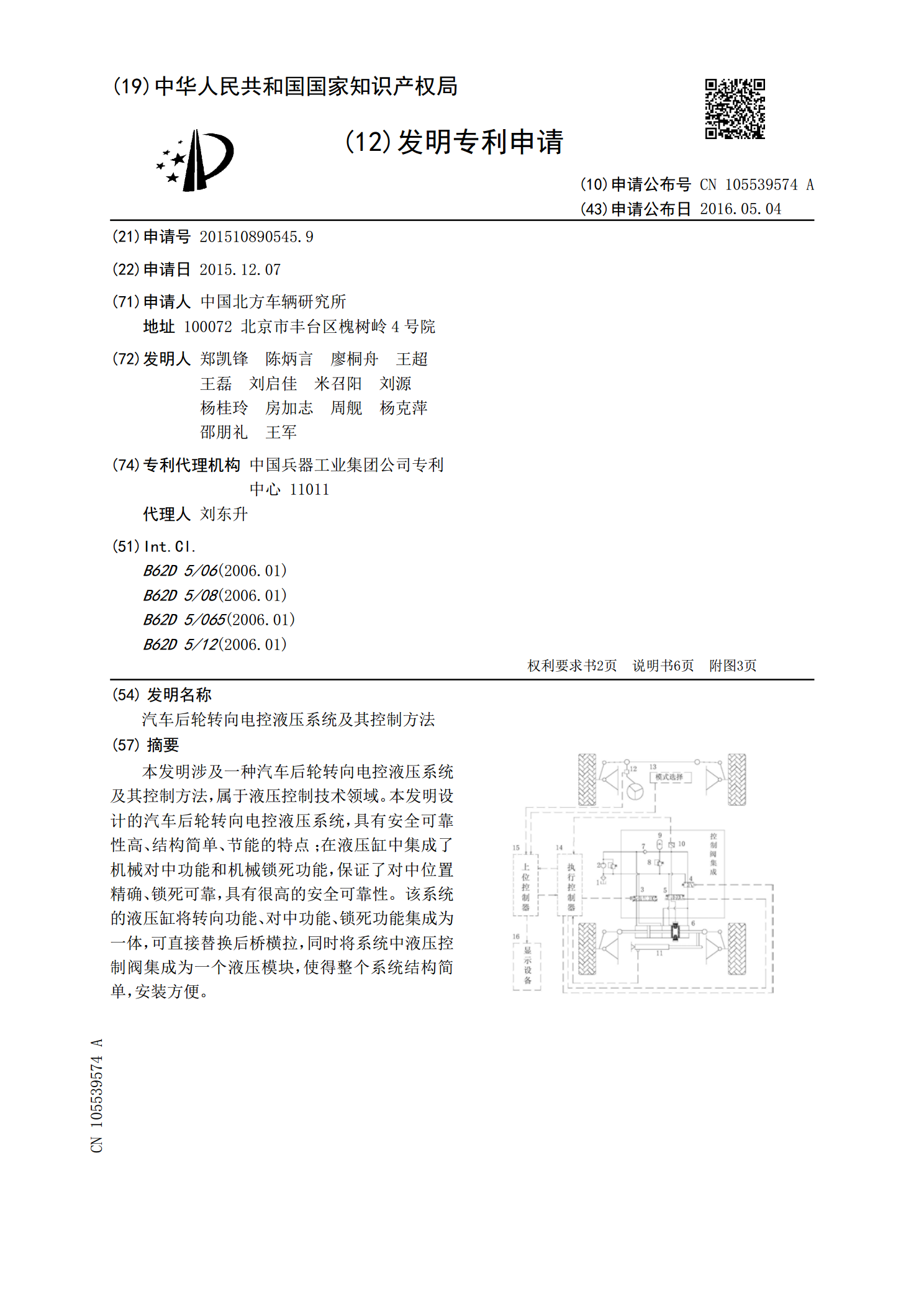
本发明涉及一种汽车后轮转向电控液压系统及其控制方法,属于液压控制技术领域。本发明设计的汽车后轮转向电控液压系统,具有安全可靠性高、结构简单、节能的特点;在液压缸中集成了机械对中功能和机械锁死功能,保证了对中位置精确、锁死可靠,具有很高的安全可靠性。该系统的液压缸将转向功能、对中功能、锁死功能集成为一体,可直接替换后桥横拉,同时将系统中液压控制阀集成为一个液压模块,使得整个系统结构简单,安装方便。

认识电控液压转向系统.ppt
12345678910111213一、判断题1.电控液压转向系统均是以电动油泵代替了机械转向泵。()2.厂家不允许对电子转向泵体进行维修()3.电子泵的常见故障是漏油()一、判断题1.电控液压转向系统均是以电动油泵代替了机械转向泵。(╳)2.厂家不允许对电子转向泵体进行维修(√)3.电子泵的常见故障是漏油(√)1617