
一种用于多臂采摘机器人的猕猴桃果实群多目标识别方法.pdf

秀美****甜v


1/8

2/8

3/8

4/8

5/8
6/8

7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种用于多臂采摘机器人的猕猴桃果实群多目标识别方法.pdf
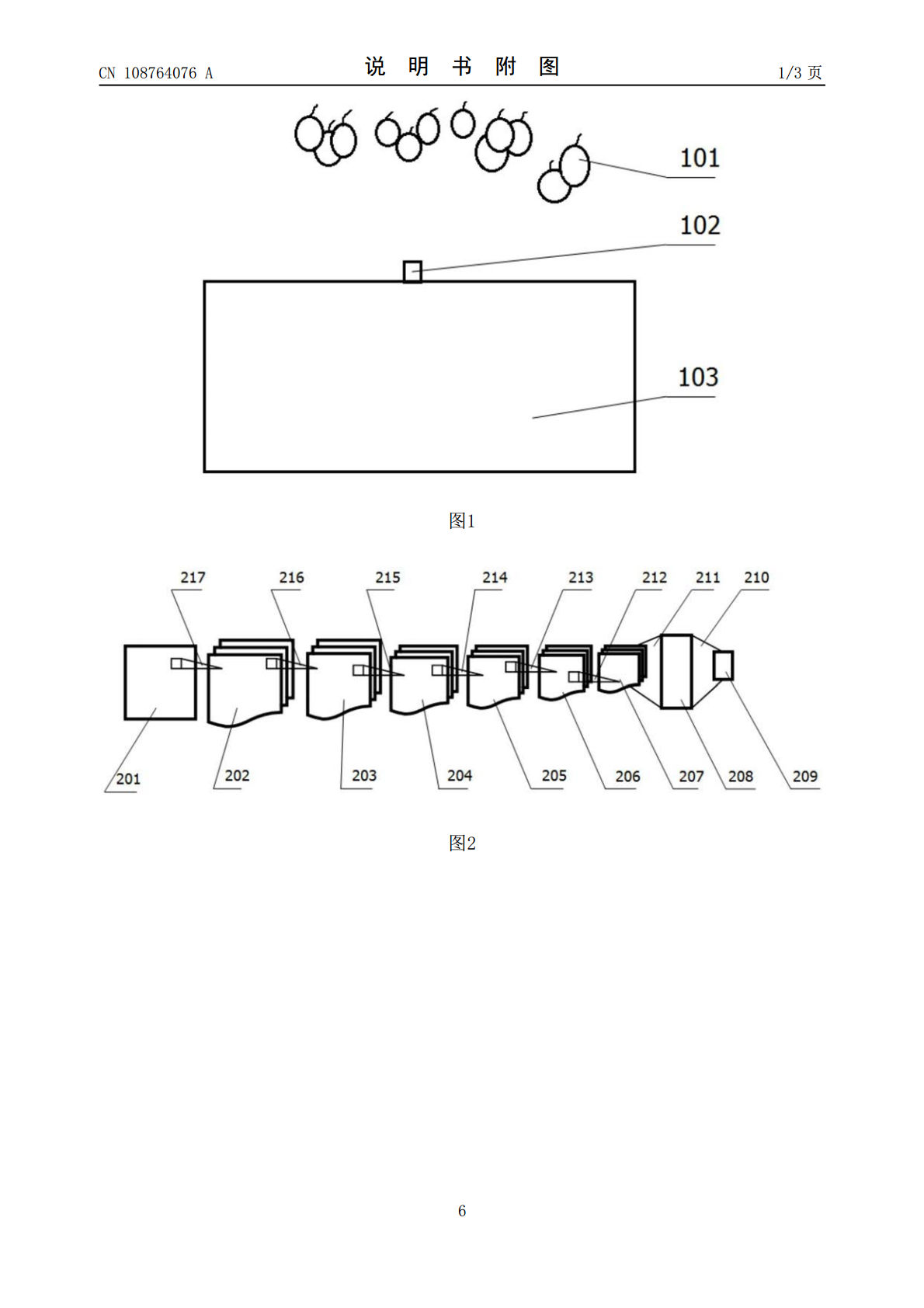
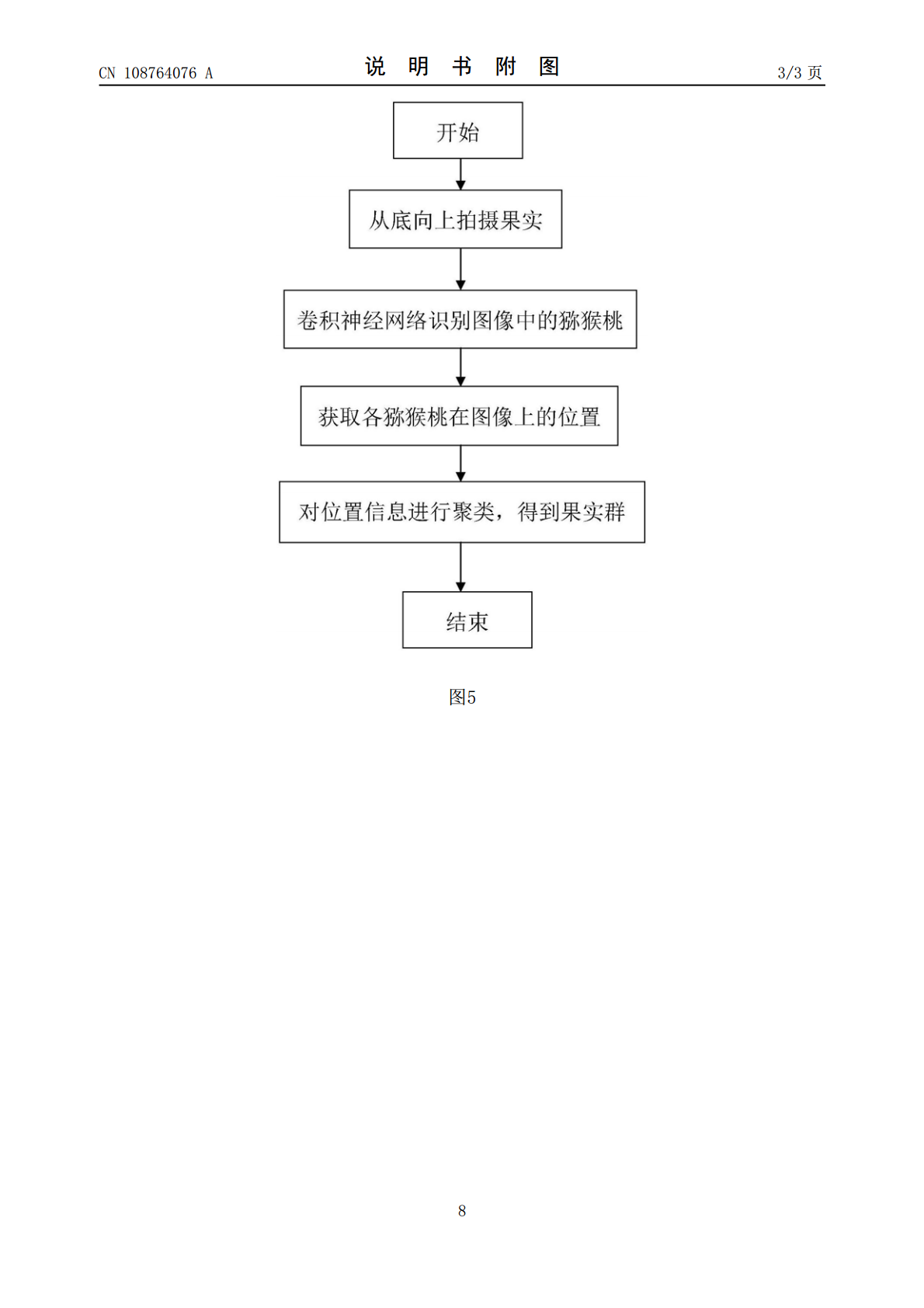
本发明公开了一种用于多臂采摘机器人的猕猴桃果实群多目标识别方法,属于采摘机器人领域。包括:从底向上拍摄果实群,通过一个经训练的卷积神经网络对拍摄到的图像进行计算,识别出图像中的猕猴桃,并获取每个猕猴桃在图像上的位置信息。根据各个猕猴桃位置之间的距离远近关系对这些位置信息进行聚类,将距离相近的果实归为一个果实群,采摘机器人上有几个机械臂就聚类几个果实群,同一个果实群由同一个机械臂进行采摘,使机械臂之间的作业互不干涉。

果实采摘机器人多目标视觉识别方法研究.docx
果实采摘机器人多目标视觉识别方法研究摘要:本文介绍了一种应用于果实采摘机器人的多目标视觉识别方法。该方法使用了现代计算机视觉技术,包括图像分割、边界检测和形态学处理等。对于不同种类的果实,可以通过调整算法参数来适应其特征。通过实验验证,该方法能够较为准确地识别果实,并指导机器人采摘果实,提高了果实采摘效率。关键词:机器人;多目标视觉识别;果实采摘;计算机视觉技术;图像分割;边界检测;形态学处理。引言:果实采摘是农业生产中一个重要的环节,传统的采摘方式往往需要大量的人力,而且效率较低。为了提高采摘效率和效益
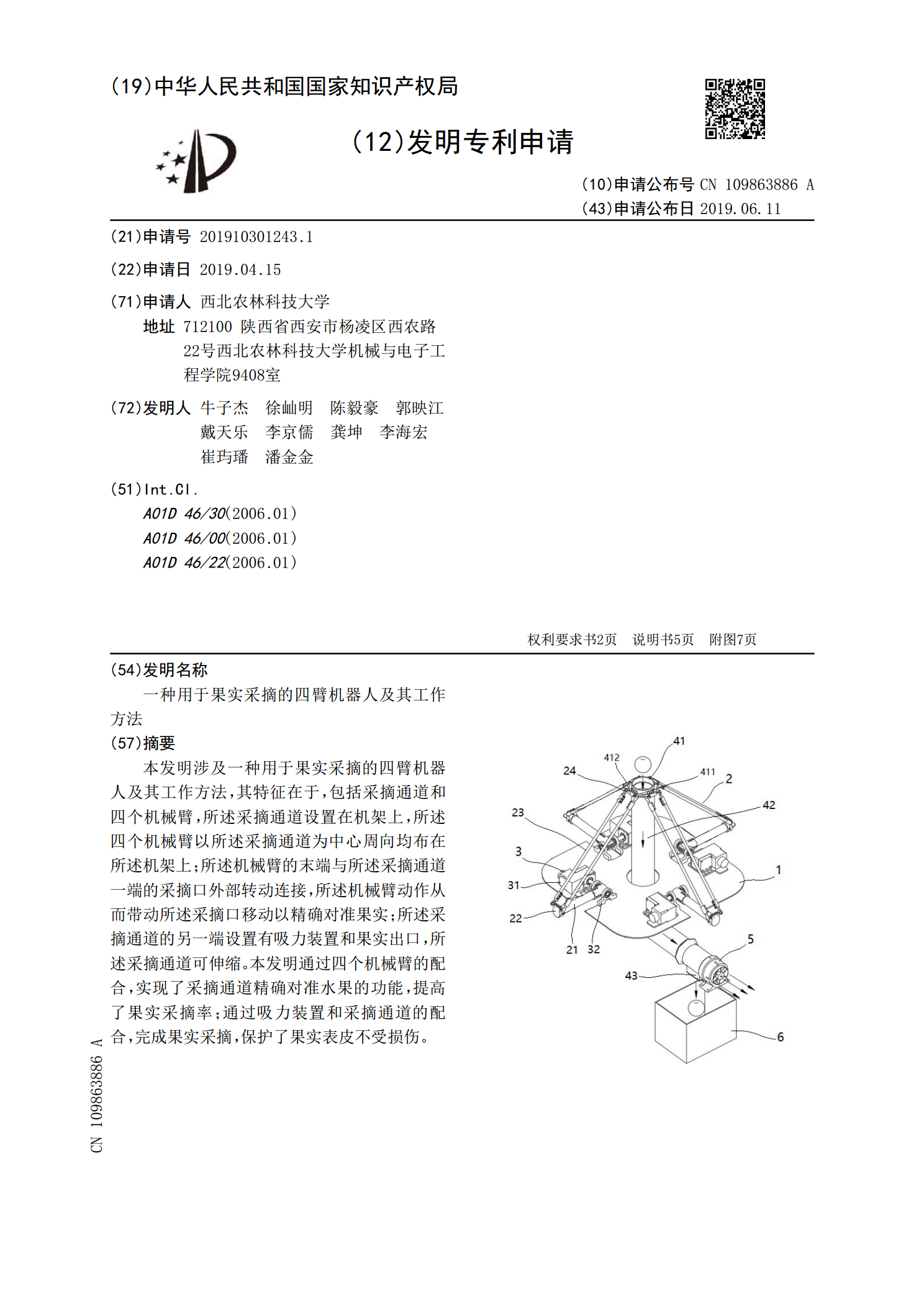
一种用于果实采摘的四臂机器人及其工作方法.pdf
本发明涉及一种用于果实采摘的四臂机器人及其工作方法,其特征在于,包括采摘通道和四个机械臂,所述采摘通道设置在机架上,所述四个机械臂以所述采摘通道为中心周向均布在所述机架上;所述机械臂的末端与所述采摘通道一端的采摘口外部转动连接,所述机械臂动作从而带动所述采摘口移动以精确对准果实;所述采摘通道的另一端设置有吸力装置和果实出口,所述采摘通道可伸缩。本发明通过四个机械臂的配合,实现了采摘通道精确对准水果的功能,提高了果实采摘率;通过吸力装置和采摘通道的配合,完成果实采摘,保护了果实表皮不受损伤。

一种果实采摘机器人机械臂.pdf
本发明公开一种果实采摘机器人机械臂。双连杆组成大臂,其关节电机置于U型座上,电机输出轴与大臂直连杆用联轴器连接,大臂曲连杆与U型座用CF轴承铰接,构成大臂转动关节,小臂关节电机固定在曲连杆上,小同步带轮装在该电机输出轴上,双连杆的另一端与关节轴铰接,在关节轴的一端装配大同步带轮,由同步带减速传动带动固定在关节轴上的小臂转动,构成小臂转动关节,在小臂连杆上固定滑轨、齿条和电机,齿轮与齿条传动构成小臂移动关节,滑轨端部铰接舵机构成腕部关节,转盘与电机连接构成旋转关节。本机械臂具有5个自由度,整体刚性强,与果实

一种棚架猕猴桃的多臂高速采摘机器人及其作业方法.pdf
本发明公开一种棚架猕猴桃的多臂高速采摘机器人及其作业方法,多臂高速采摘机器人由横向分区多目多臂系统、自主移动底盘和“分体式”多路果实装箱换箱系统组成,横向分区多目多臂系统包括n个视觉伺服采摘模块;多臂高速采摘机器人的作业区域相对其纵向轴线对称等分为n个分区,以相邻两分区边界为中心线设定公共采摘区,相对自主移动底盘中心线对称布置有n个视觉伺服采摘模块,视觉伺服采摘模块包括线式采摘手臂、三维相机和吞咽式末端执行器,多臂高速采摘机器人按照公共采摘区内、外差异化的多线式采摘手臂并行作业方法实现多臂高速无碰采摘。本