
爬壁机器人的研究现状.docx

豆柴****作者


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共21页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

爬壁机器人的研究现状.docx
爬壁机器人的研究现状一、概要随着科技的飞速发展,爬壁机器人作为一类特殊的机器人,已经逐渐成为人们研究的重点。从最初的概念设计到现代的技术研究,爬壁机器人已经取得了较大的突破。本文将对爬壁机器人的研究现状进行概述,包括其发展历程、技术原理以及实际应用等方面。我们从爬壁机器人的发展历程来看,早期主要集中在轨道式和吸附式两大类机器人。随着科技的发展,爬壁机器人逐渐拓展了其应用范围,并衍生出一系列新型的爬壁机器人。通过对不同类型的爬壁机器人所开展的研究,人们对爬壁机器人学理论体系有了较为清晰的认识。回顾爬壁机器人

日本磁吸附爬壁机器人的研究现状.docx
日本磁吸附爬壁机器人的研究现状日本磁吸附爬壁机器人的研究现状引言:随着科学技术的不断发展,机器人技术也日益成熟。机器人在各个领域的应用越来越广泛,其中,磁吸附爬壁机器人作为一种独特的机器人技术,具有巨大的应用潜力。磁吸附爬壁机器人能够在垂直、倾斜或者水平的表面上运动,具有较强的灵活性和适应性。本文将介绍日本磁吸附爬壁机器人的研究现状,分析其应用领域和发展趋势。一、磁吸附爬壁机器人的概述磁吸附爬壁机器人是一种通过利用磁吸力在不规则表面上爬行的机器人。其主要部件包括磁吸盘、磁吸材料、传感器、电机等。磁吸盘通过

爬壁机器人研究现状调查说课材料.doc
爬壁机器人研究现状调查精品文档精品文档收集于网络,如有侵权请联系管理员删除收集于网络,如有侵权请联系管理员删除精品文档收集于网络,如有侵权请联系管理员删除爬壁检测移动机器人研究现状调查研究的背景及其意义随着社会不断进步和科技不断发展,摩天大楼已成为现代都市不可缺少的重要组成部分。人们在享受高楼大厦带来的好处的同时也不得不面临由此而带来的诸多难题,如高层建筑物立面的施工建设质量,维护以及安全监测等问题。传统方法只有通过靠搭脚手架或采用吊篮等人工目测方法进行检测,检测精度低,检测过程十分危险,效率不高且成本较

爬壁机器人的设计与研究.docx
爬壁机器人的设计与研究标题:爬壁机器人的设计与研究摘要:随着科技的进步和人们对于自动化技术需求的增加,爬壁机器人逐渐成为热门的研究方向。本论文以爬壁机器人的设计与研究为课题,系统地研究了爬壁机器人的原理、结构、控制算法等关键技术,旨在为爬壁机器人的进一步发展提供参考。一、引言随着现代建筑结构的复杂化和人们对快速高效维护的需求,传统的人工维护方式已经无法满足需求。而爬壁机器人,作为一种可以自主爬行在垂直壁面的机器人,在解决高空作业和危险环境维护等方面具有巨大的潜力。二、爬壁机器人的结构设计爬壁机器人的结构设
爬壁机器人.pdf
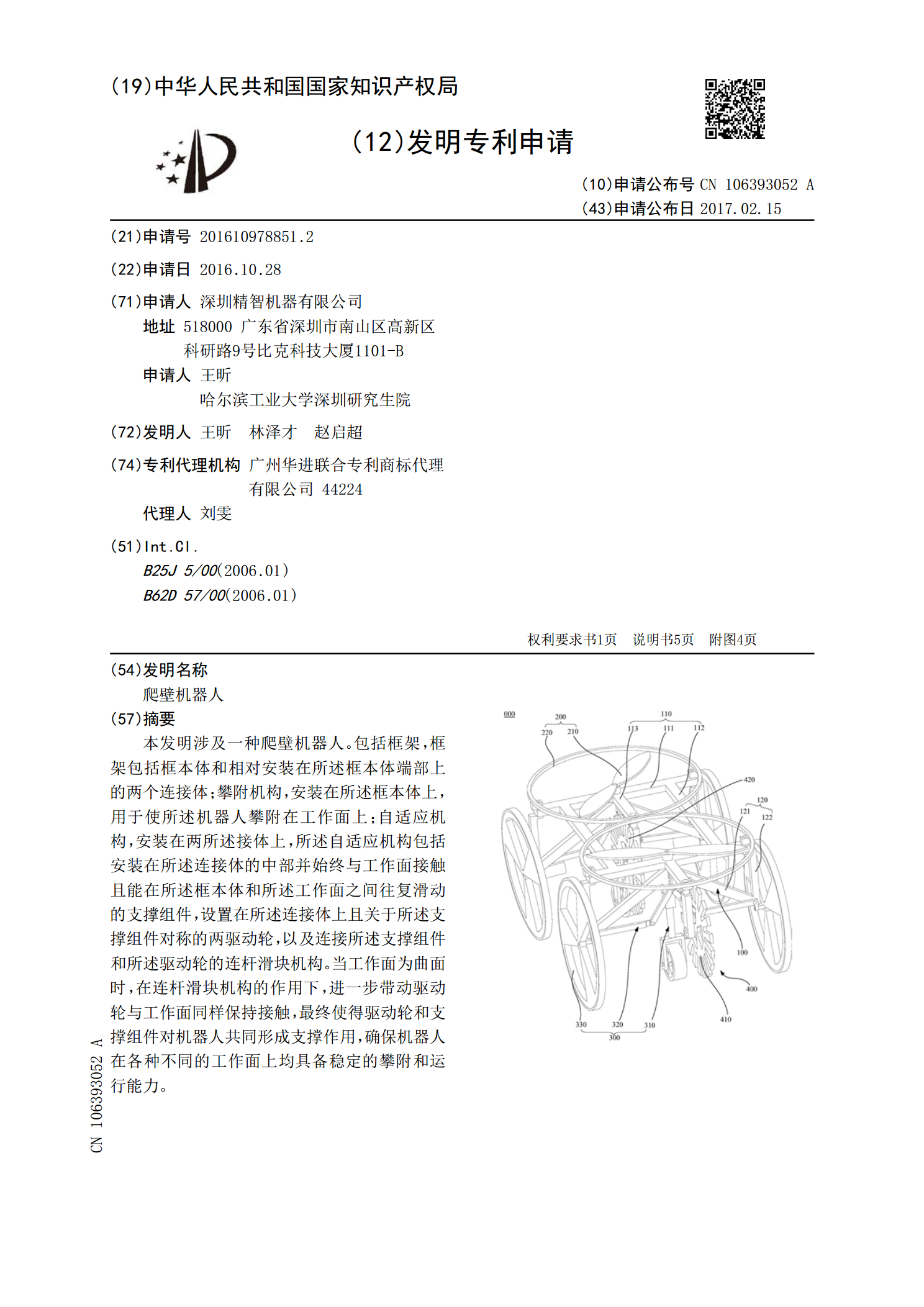
本发明涉及一种爬壁机器人。包括框架,框架包括框本体和相对安装在所述框本体端部上的两个连接体;攀附机构,安装在所述框本体上,用于使所述机器人攀附在工作面上;自适应机构,安装在两所述接体上,所述自适应机构包括安装在所述连接体的中部并始终与工作面接触且能在所述框本体和所述工作面之间往复滑动的支撑组件,设置在所述连接体上且关于所述支撑组件对称的两驱动轮,以及连接所述支撑组件和所述驱动轮的连杆滑块机构。当工作面为曲面时,在连杆滑块机构的作用下,进一步带动驱动轮与工作面同样保持接触,最终使得驱动轮和支撑组件对机器人共