
一种基于深度神经网络的室内定位系统.pdf

慧娇****文章

1/9
2/9
3/9
4/9
5/9
6/9
7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种基于深度神经网络的室内定位系统.pdf
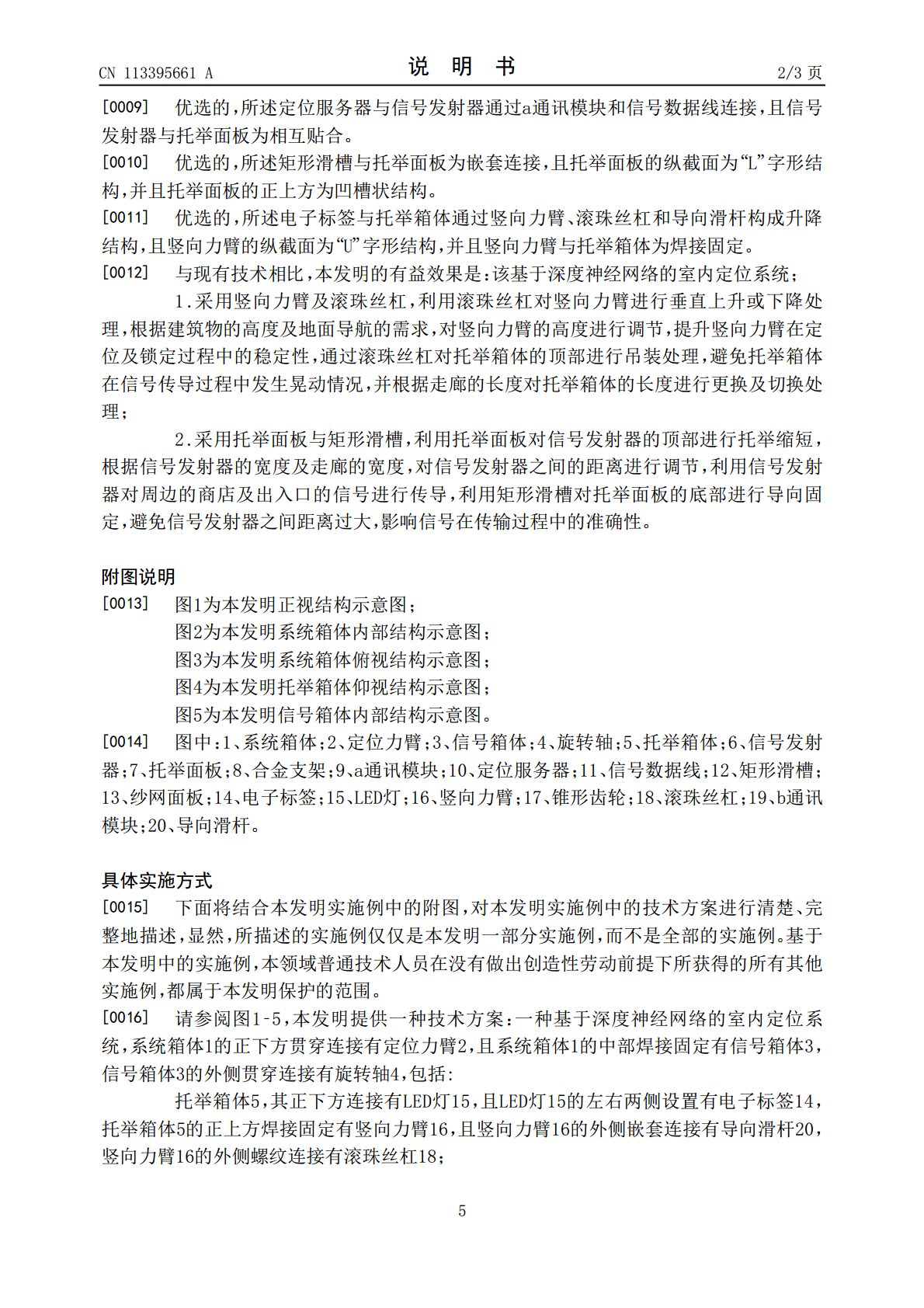
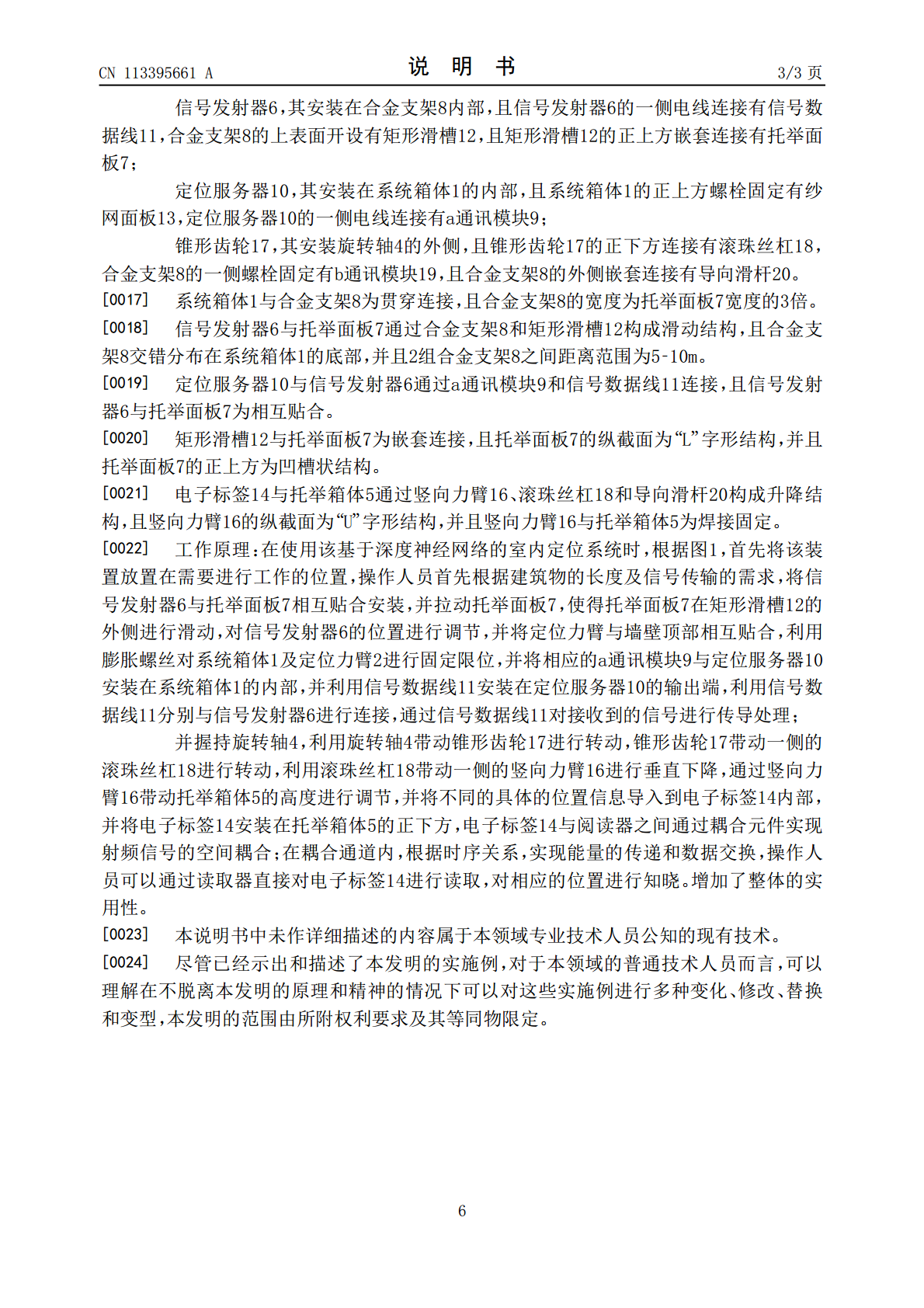
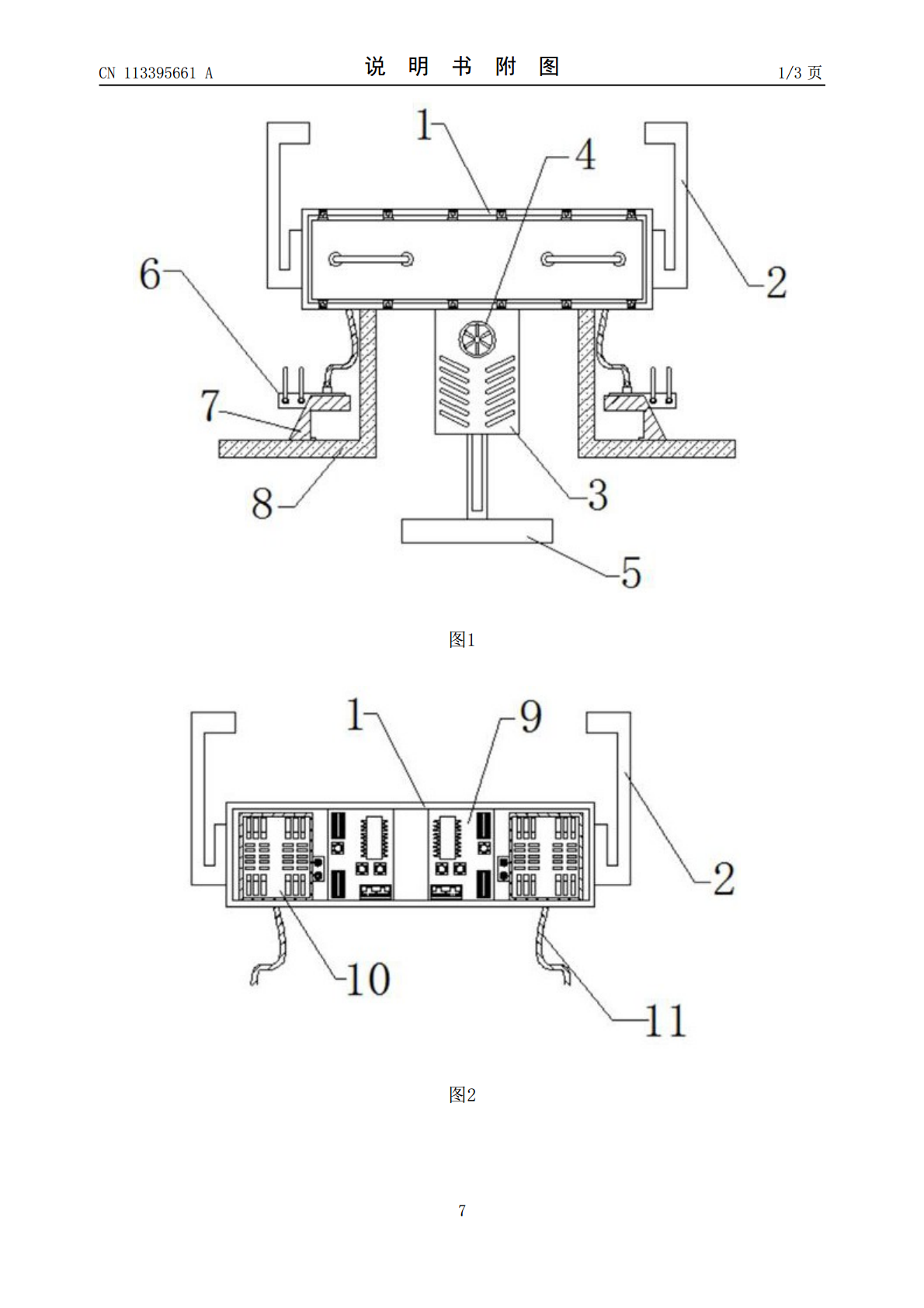
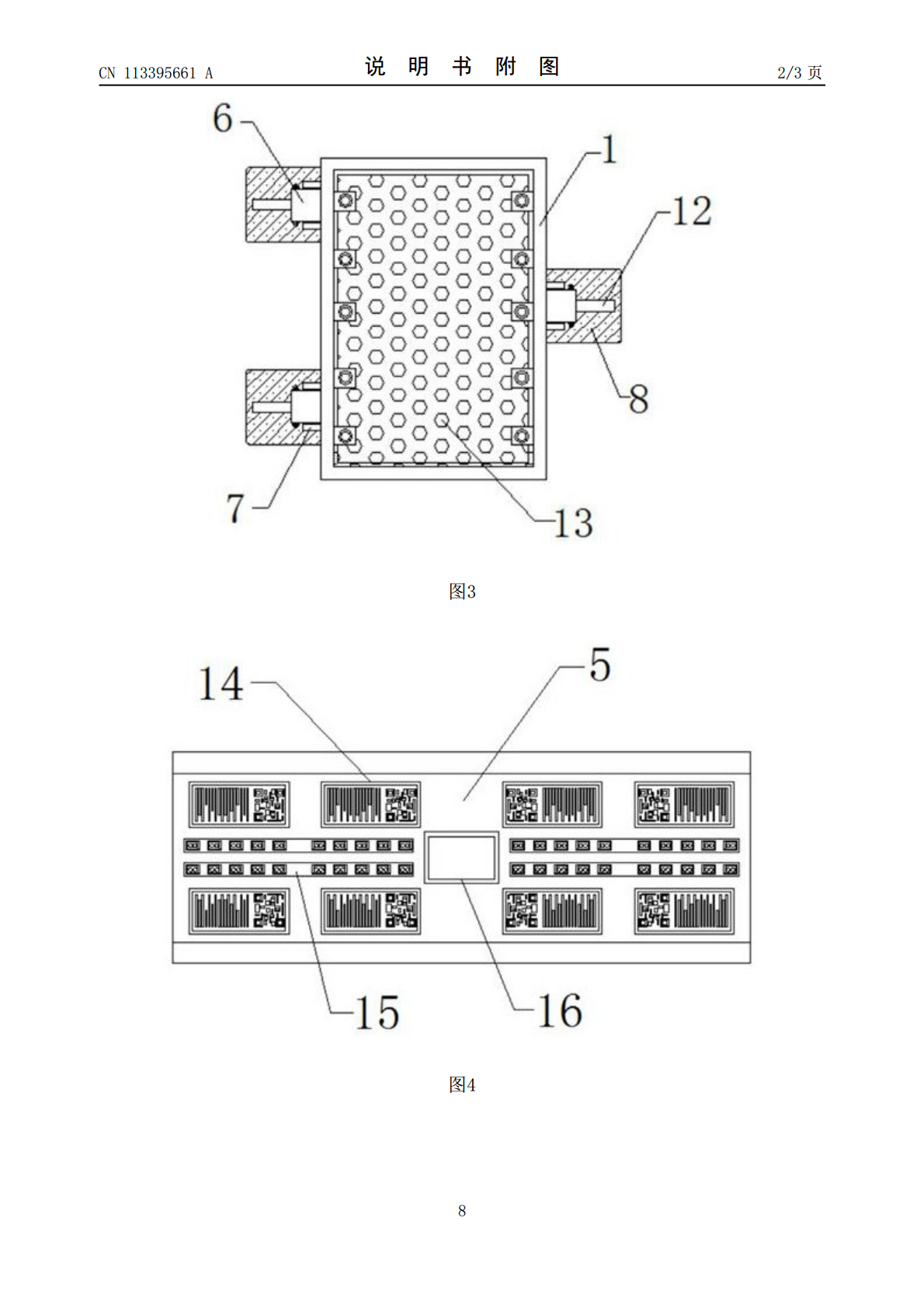
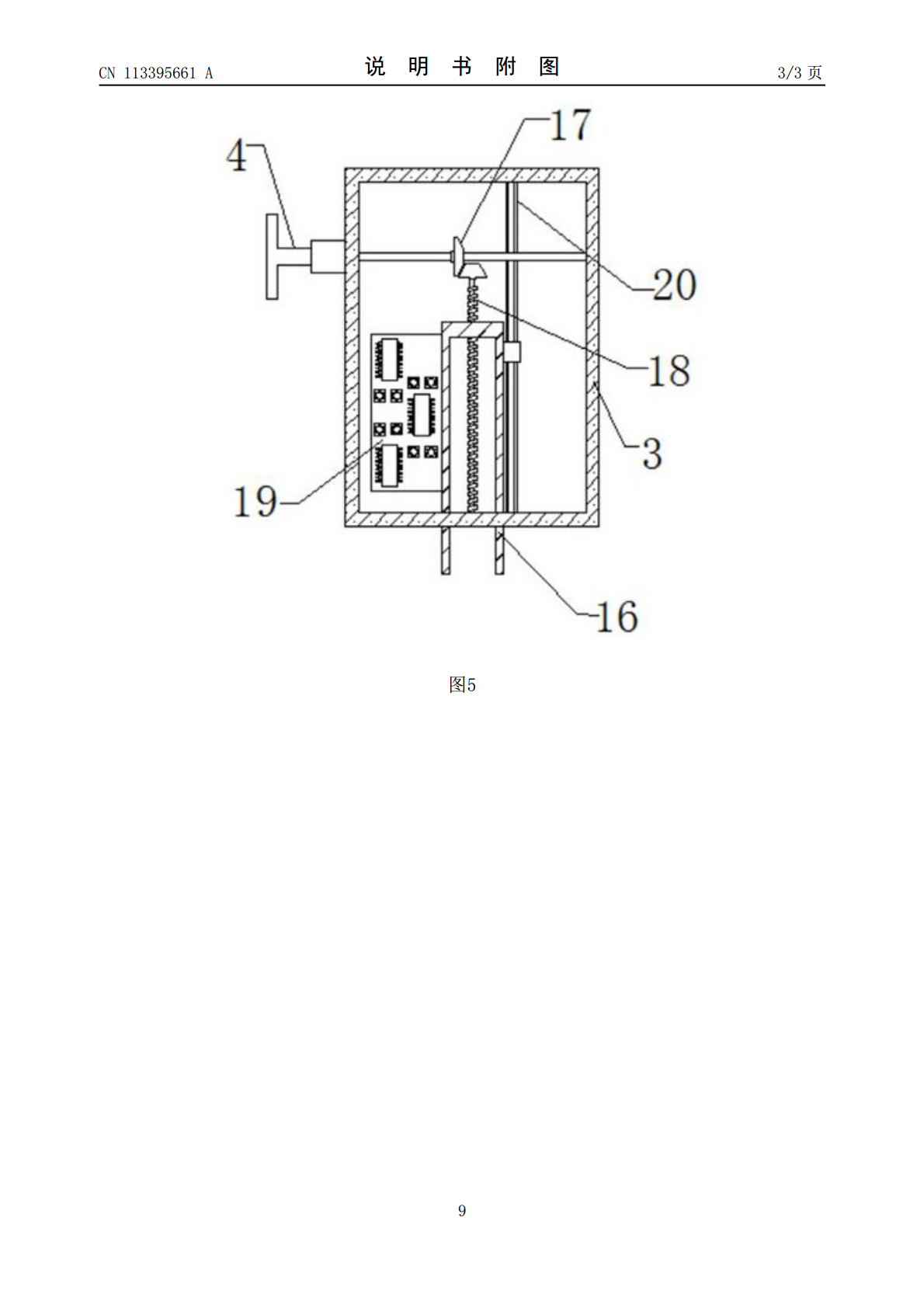
本发明公开了一种基于深度神经网络的室内定位系统,系统箱体的正下方贯穿连接有定位力臂,且系统箱体的中部焊接固定有信号箱体,所述信号箱体的外侧贯穿连接有旋转轴,包括:托举箱体,其正下方连接有LED灯,且LED灯的左右两侧设置有电子标签,所述托举箱体的正上方焊接固定有竖向力臂,且竖向力臂的外侧嵌套连接有导向滑杆,所述竖向力臂的外侧螺纹连接有滚珠丝杠;且信号发射器的一侧电线连接有信号数据线,所述合金支架的上表面开设有矩形滑槽。该基于深度神经网络的室内定位系统;采用竖向力臂及滚珠丝杠,利用滚珠丝杠对竖向力臂进行垂直
一种基于BP神经网络精确室内定位系统及定位方法.pdf
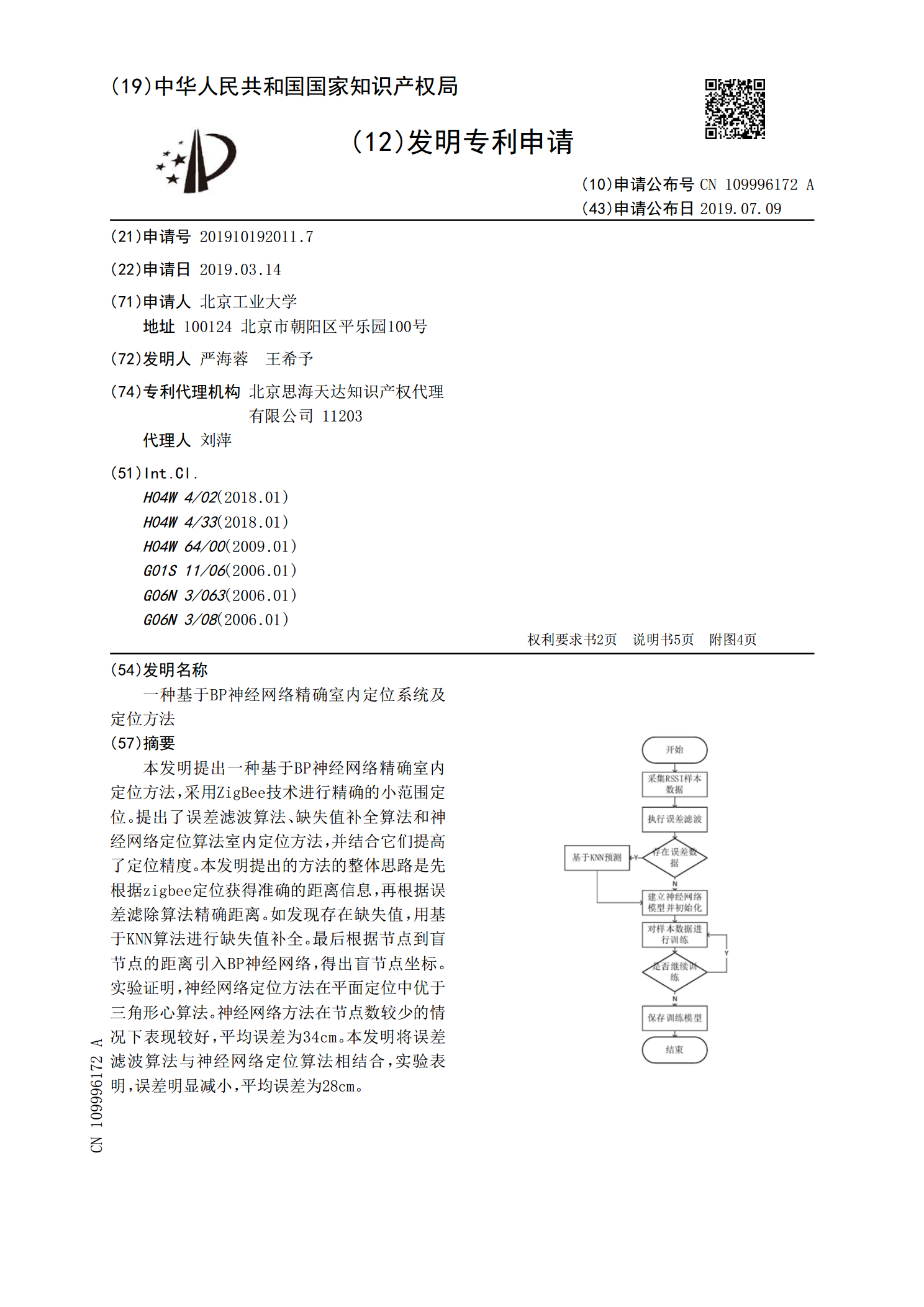
本发明提出一种基于BP神经网络精确室内定位方法,采用ZigBee技术进行精确的小范围定位。提出了误差滤波算法、缺失值补全算法和神经网络定位算法室内定位方法,并结合它们提高了定位精度。本发明提出的方法的整体思路是先根据zigbee定位获得准确的距离信息,再根据误差滤除算法精确距离。如发现存在缺失值,用基于KNN算法进行缺失值补全。最后根据节点到盲节点的距离引入BP神经网络,得出盲节点坐标。实验证明,神经网络定位方法在平面定位中优于三角形心算法。神经网络方法在节点数较少的情况下表现较好,平均误差为34cm。本

一种基于RFID的室内定位系统.pdf
本发明提供一种基于RFID的室内定位系统,该系统由无源电子标签,阅读器模块,单片机,无线收发模块,和多个运动的需要被定位的小车组成。无源标签的EPC值为二维平面的坐标即用存储EPC值的4个字节的前2位代表横轴坐标,用剩下的2位代表纵轴坐标。修改好标签的EPC值后将标签部署在地面对应的坐标点。将阅读器模块安装在每个小车的底部,阅读器模块通过串口与单片机相连,单片机每隔0.2s给阅读器发送读标签的指令,单片机在收到阅读器返回的标签的数据后经过特定的算法处理得出坐标,与单片机相连的无线收发模块再将这个坐标发出去
一种基于地磁图谱的室内定位方法及定位系统.pdf
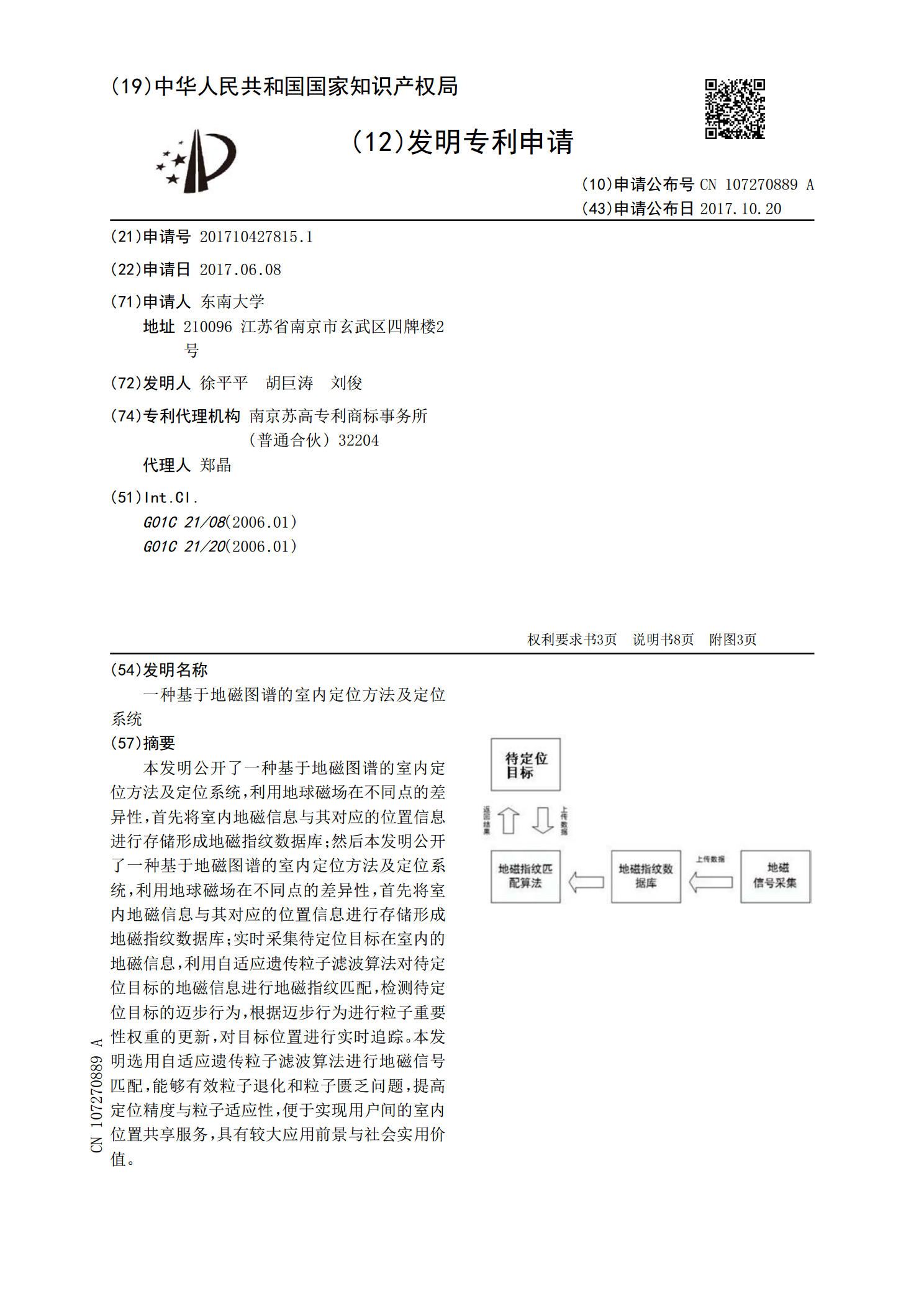
本发明公开了一种基于地磁图谱的室内定位方法及定位系统,利用地球磁场在不同点的差异性,首先将室内地磁信息与其对应的位置信息进行存储形成地磁指纹数据库;然后本发明公开了一种基于地磁图谱的室内定位方法及定位系统,利用地球磁场在不同点的差异性,首先将室内地磁信息与其对应的位置信息进行存储形成地磁指纹数据库;实时采集待定位目标在室内的地磁信息,利用自适应遗传粒子滤波算法对待定位目标的地磁信息进行地磁指纹匹配,检测待定位目标的迈步行为,根据迈步行为进行粒子重要性权重的更新,对目标位置进行实时追踪。本发明选用自适应遗传

基于UWB的室内定位系统.pdf
本发明公开了一种基于UWB的室内定位系统,包括:主传感器,设置在定位区域的第一位置作为锚节点;第一从传感器,设置在定位区域的第二位置作为第一桥节点;第二从传感器,设置在定位区域的第三位置作为第二桥节点;待定位标签,以预设频率发出UWB脉冲信号;UWB脉冲信号包括时间戳和待定位标签的UUID;射频模块,用于控制至少一个待定位标签轮流测距;主传感器分别从第一从传感器和第二从传感器接收第二距离信息和第三距离信息;主传感器汇总第一距离信息、第二距离信息和第三距离信息,获取定位信息。设置射频模块,控制多个待定位标签