
农用作业机、自动行驶系统、程序、记录有程序的记录介质以及方法.pdf

书生****66

1/10

2/10
3/10

4/10
5/10
6/10
7/10
8/10

9/10

10/10
亲,该文档总共26页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
农用作业机、自动行驶系统、程序、记录有程序的记录介质以及方法.pdf
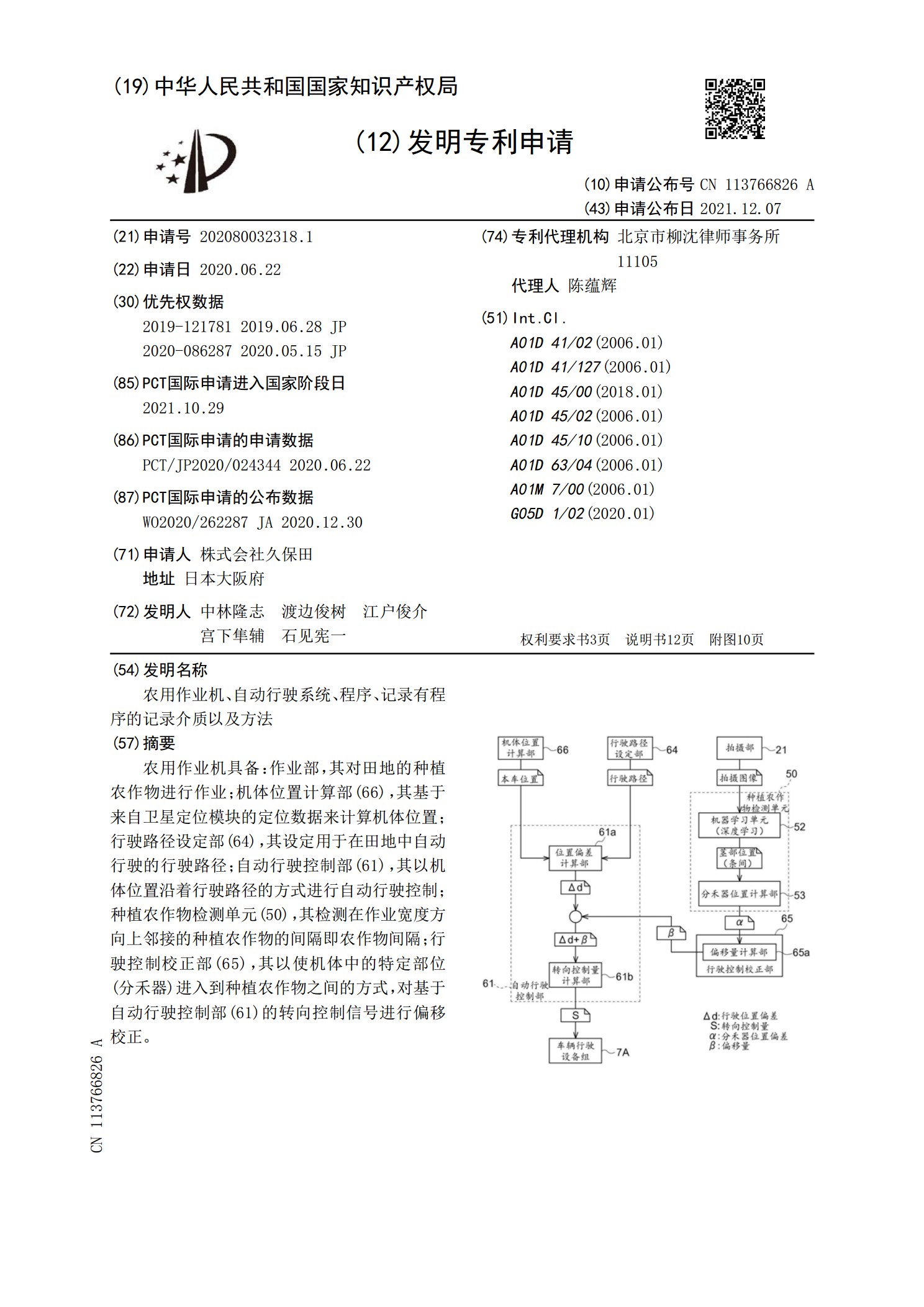
农用作业机具备:作业部,其对田地的种植农作物进行作业;机体位置计算部(66),其基于来自卫星定位模块的定位数据来计算机体位置;行驶路径设定部(64),其设定用于在田地中自动行驶的行驶路径;自动行驶控制部(61),其以机体位置沿着行驶路径的方式进行自动行驶控制;种植农作物检测单元(50),其检测在作业宽度方向上邻接的种植农作物的间隔即农作物间隔;行驶控制校正部(65),其以使机体中的特定部位(分禾器)进入到种植农作物之间的方式,对基于自动行驶控制部(61)的转向控制信号进行偏移校正。
收获机、收获机的自动行驶方法、程序、记录介质、系统、农作业机、农作业机的自动行驶方法、方法、自动操舵管理系统.pdf
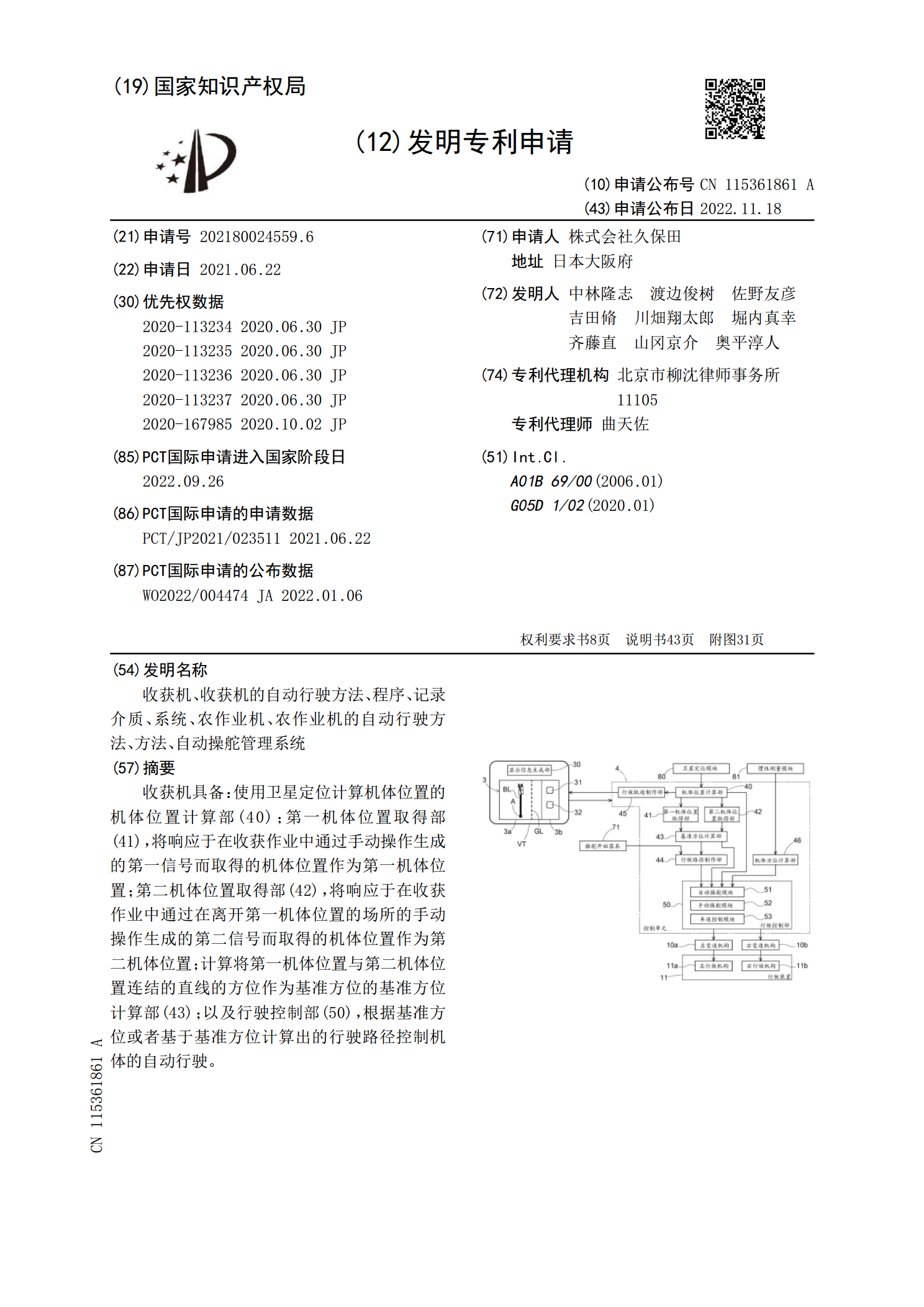
收获机具备:使用卫星定位计算机体位置的机体位置计算部(40);第一机体位置取得部(41),将响应于在收获作业中通过手动操作生成的第一信号而取得的机体位置作为第一机体位置;第二机体位置取得部(42),将响应于在收获作业中通过在离开第一机体位置的场所的手动操作生成的第二信号而取得的机体位置作为第二机体位置;计算将第一机体位置与第二机体位置连结的直线的方位作为基准方位的基准方位计算部(43);以及行驶控制部(50),根据基准方位或者基于基准方位计算出的行驶路径控制机体的自动行驶。
行驶路径生成系统、行驶路径生成方法、行驶路径生成程序及记录有行驶路径生成程序的记录介质、作业管理系统、作业管理方法、作业.pdf
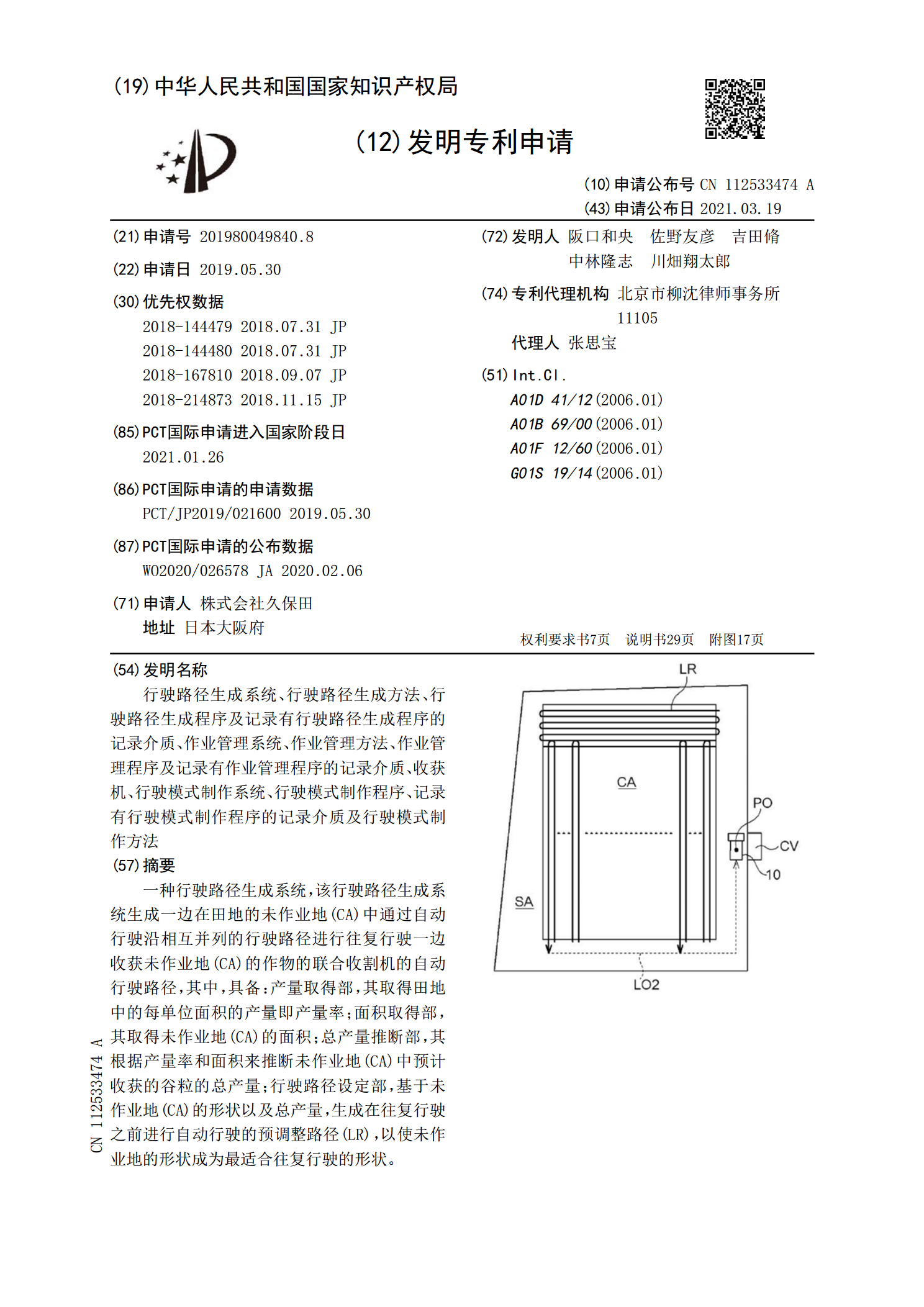
一种行驶路径生成系统,该行驶路径生成系统生成一边在田地的未作业地(CA)中通过自动行驶沿相互并列的行驶路径进行往复行驶一边收获未作业地(CA)的作物的联合收割机的自动行驶路径,其中,具备:产量取得部,其取得田地中的每单位面积的产量即产量率;面积取得部,其取得未作业地(CA)的面积;总产量推断部,其根据产量率和面积来推断未作业地(CA)中预计收获的谷粒的总产量;行驶路径设定部,基于未作业地(CA)的形状以及总产量,生成在往复行驶之前进行自动行驶的预调整路径(LR),以使未作业地的形状成为最适合往复行驶的形状

支援系统、支援方法、支援程序以及记录有支援程序的记录介质.pdf
本发明的课题为提供在手术前能够提供适合手术的导管的支援系统。支援系统(100)具备:预定信息获取部(111),其获取手术的疾患信息、和与患者的血管中接触导管而能够对导管赋予支持力的部分的形状有关的血管信息;过去信息获取部(113),其获取疾患信息与手术一致、且血管信息与手术类似的过去的类似手术中所使用的导管(C0)的形状;以及提案部(114),其基于对手术的血管信息与过去的类似手术的血管信息进行比较而得到的比较结果,修正在过去的类似手术中使用的导管(C0)的形状,并提案将修正了形状的导管(C1)作为手术所

作业管理系统、作业管理程序、记录作业管理程序的记录介质以及作业管理方法.pdf
作业管理系统100具备:第一位置信息获取部21,被设置于第一收获机1,在农田内的外周部分的收获作业中,获取表示第一收获机1的本车位置的本车位置信息作为第一位置信息;第二位置信息获取部31,被设置于第二收获机2,获取第一位置信息作为第二位置信息;地图信息获取部32,被设置于第二收获机2,基于第二位置信息,获取表示农田的形状的地图信息;行驶路径生成部34,基于地图信息,生成进行外周部分的内侧的中央区域的收获作业并使第二收获机行驶的行驶路径;以及行驶控制部35,被设置于第二收获机2,基于行驶路径进行收获作业并使