
基于物联网的水肥精准调控方法、智能装备及系统.pdf

是雁****找我


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共35页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于物联网的水肥精准调控方法、智能装备及系统.pdf
本发明适用于农业灌溉施肥管理技术领域,提供了基于物联网的水肥精准调控方法、智能装备及系统,本发明采用物联网的感知层、传输层(接入层和网络层)、支撑层和应用层四层架构模式;基于STM32F103RET6自主研发多功能采集控制装置并对射流器与文丘里混合器结构进行了优化;自行设计短距离通信协议结合Lora及TCP/IP等多种协议实现智能水肥一体化联网;基于BPNN的营养液EC、营养液PH、土壤温度T、土壤湿度H等多传感器数据融合设计了具有缓冲混肥桶的传递函数并与二维增量式模糊PID控制方法集合,实现了土壤水分、
基于物联网的水肥滴灌系统.pdf
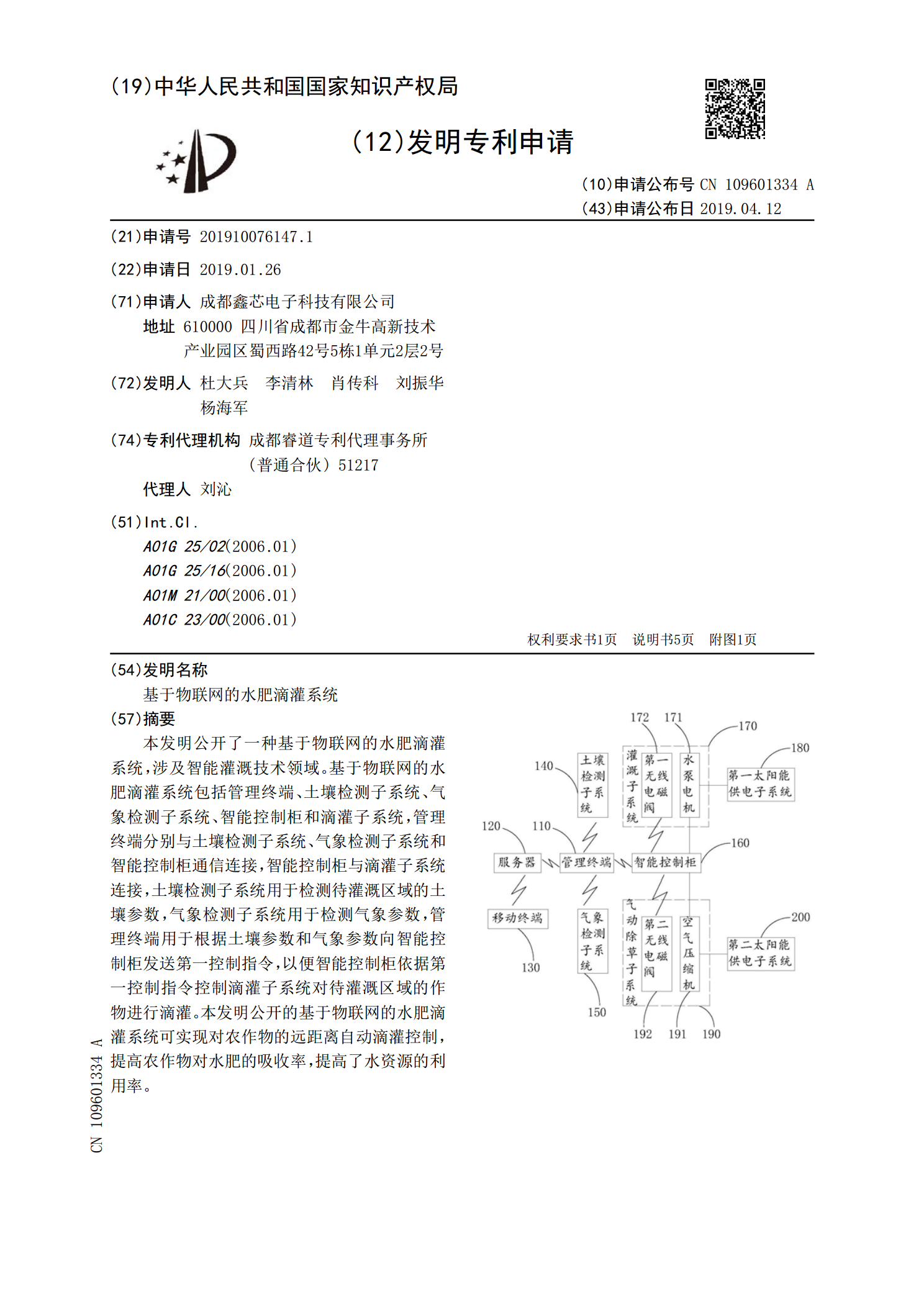
本发明公开了一种基于物联网的水肥滴灌系统,涉及智能灌溉技术领域。基于物联网的水肥滴灌系统包括管理终端、土壤检测子系统、气象检测子系统、智能控制柜和滴灌子系统,管理终端分别与土壤检测子系统、气象检测子系统和智能控制柜通信连接,智能控制柜与滴灌子系统连接,土壤检测子系统用于检测待灌溉区域的土壤参数,气象检测子系统用于检测气象参数,管理终端用于根据土壤参数和气象参数向智能控制柜发送第一控制指令,以便智能控制柜依据第一控制指令控制滴灌子系统对待灌溉区域的作物进行滴灌。本发明公开的基于物联网的水肥滴灌系统可实现对农
基于物联网的精准鼻部整形智能系统及应用.pdf
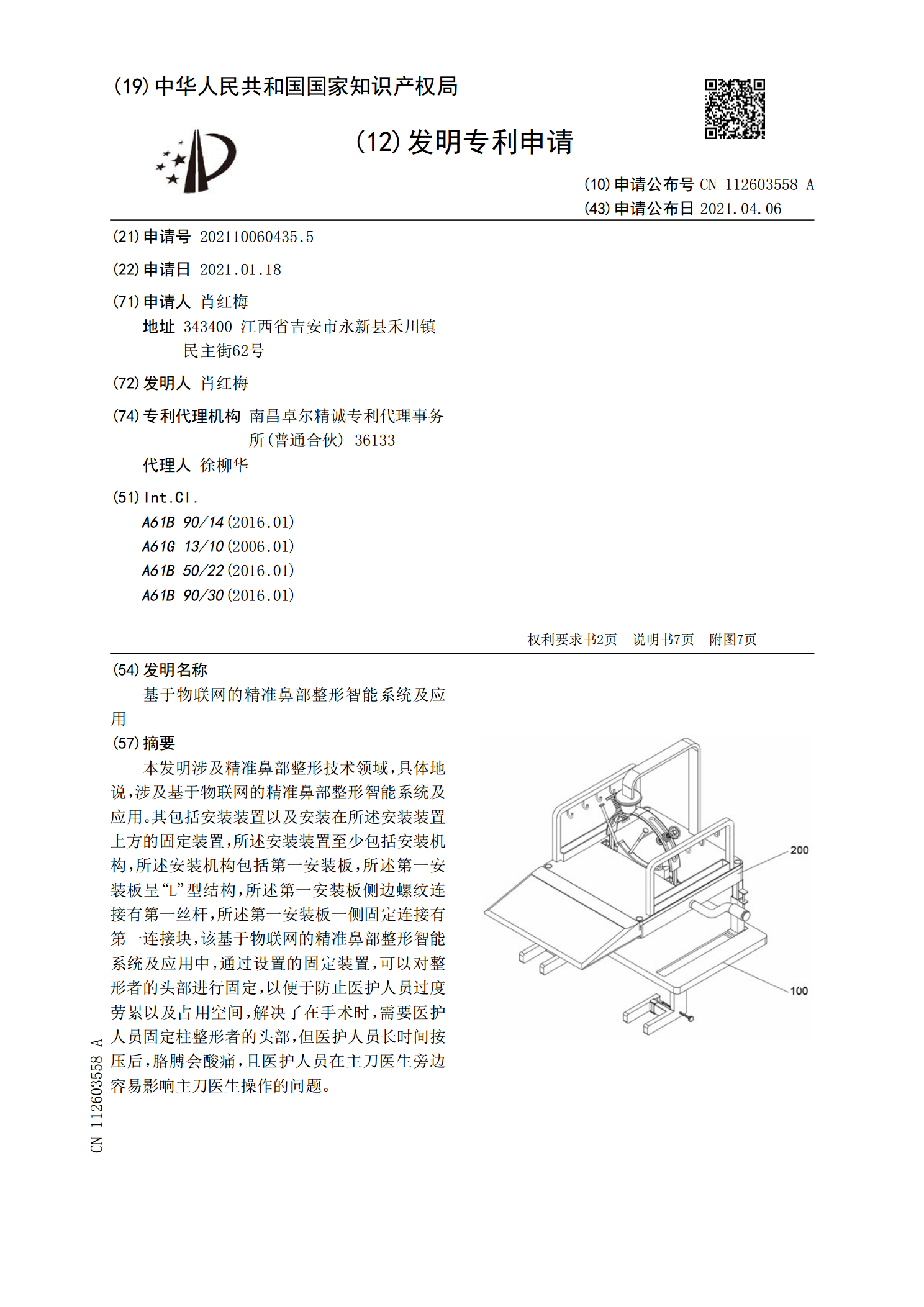
本发明涉及精准鼻部整形技术领域,具体地说,涉及基于物联网的精准鼻部整形智能系统及应用。其包括安装装置以及安装在所述安装装置上方的固定装置,所述安装装置至少包括安装机构,所述安装机构包括第一安装板,所述第一安装板呈“L”型结构,所述第一安装板侧边螺纹连接有第一丝杆,所述第一安装板一侧固定连接有第一连接块,该基于物联网的精准鼻部整形智能系统及应用中,通过设置的固定装置,可以对整形者的头部进行固定,以便于防止医护人员过度劳累以及占用空间,解决了在手术时,需要医护人员固定柱整形者的头部,但医护人员长时间按压后,胳

一种基于物联网的智能精准探水系统.pdf
本发明公开了一种基于物联网的智能精准探水系统,属于物联网技术领域,它是通过测量天然电场强弱数据来反应地下电阻率的变化,通过对地下电阻率变化的分析判断,可以在PC端找出地下水的位置、深度、走向和出水量等精准信息,对于地下水资源的开发具有重大的意义。

一种水肥耦合精准调控系统及其控制方法.pdf
本发明公开了一种水肥耦合精准调控系统及其控制方法,包括监测单元、控制中心和水肥耦合装置,所述监测单元与控制中心数据通讯连接,所述控制中心的控制输出端与所述水肥耦合装置的控制输入端连接,所述水肥耦合装置由控制中心自动化控制。本发明能够实时监测和采集苗木根区基质中的水分和养分信息,并将其与设置的目标阈值进行对比,分析决策是否需要补灌水和施肥,控制水肥耦合装置上的泵和电磁阀的开启或关闭,实现以苗木根区基质中当前水分养分含量作为输入量,所需补充的灌水量和肥量为输出量,目标阈值下限值为启动判断基准,实时确保苗木根区