
一种施肥机自动调控系统及自动调控方法.pdf

书生****萌哒


1/10

2/10
3/10
4/10
5/10

6/10

7/10
8/10
9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种施肥机自动调控系统及自动调控方法.pdf
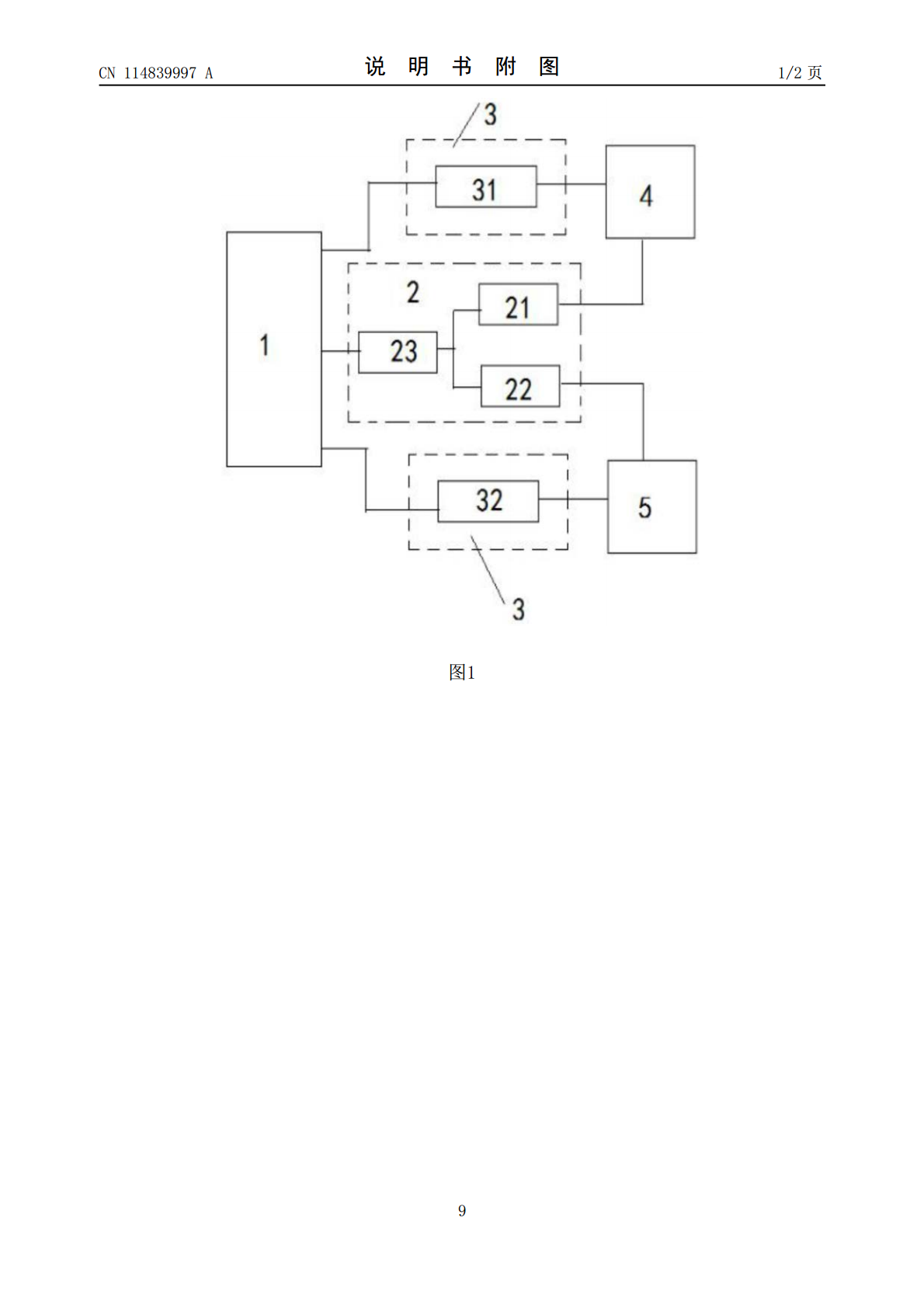
本发明涉及一种施肥机自动调控系统及自动调控方法,通过实时采集施肥机的运动速度计算得到颗粒肥排肥器的理论转速以及有机肥排肥器的理论开度,控制器根据理论转速和理论开度分别控制电机驱动器驱动颗粒肥排肥器电机转动以及控制电子推杆开启有机肥排肥器排肥口,通过转速传感器采集颗粒肥排肥器的实际转速,并通过位置传感器采集有机肥排肥器的实际开度,根据理论转速和理论开度分别不断对颗粒肥排肥器电机转速和有机肥排肥器排肥口的开度进行调整,使得颗粒肥排肥器电机的转速与颗粒肥施肥量相匹配,有机肥排肥器的开度与有机肥施肥量相匹配,实现
一种施肥机的施肥深度调控方法.pdf
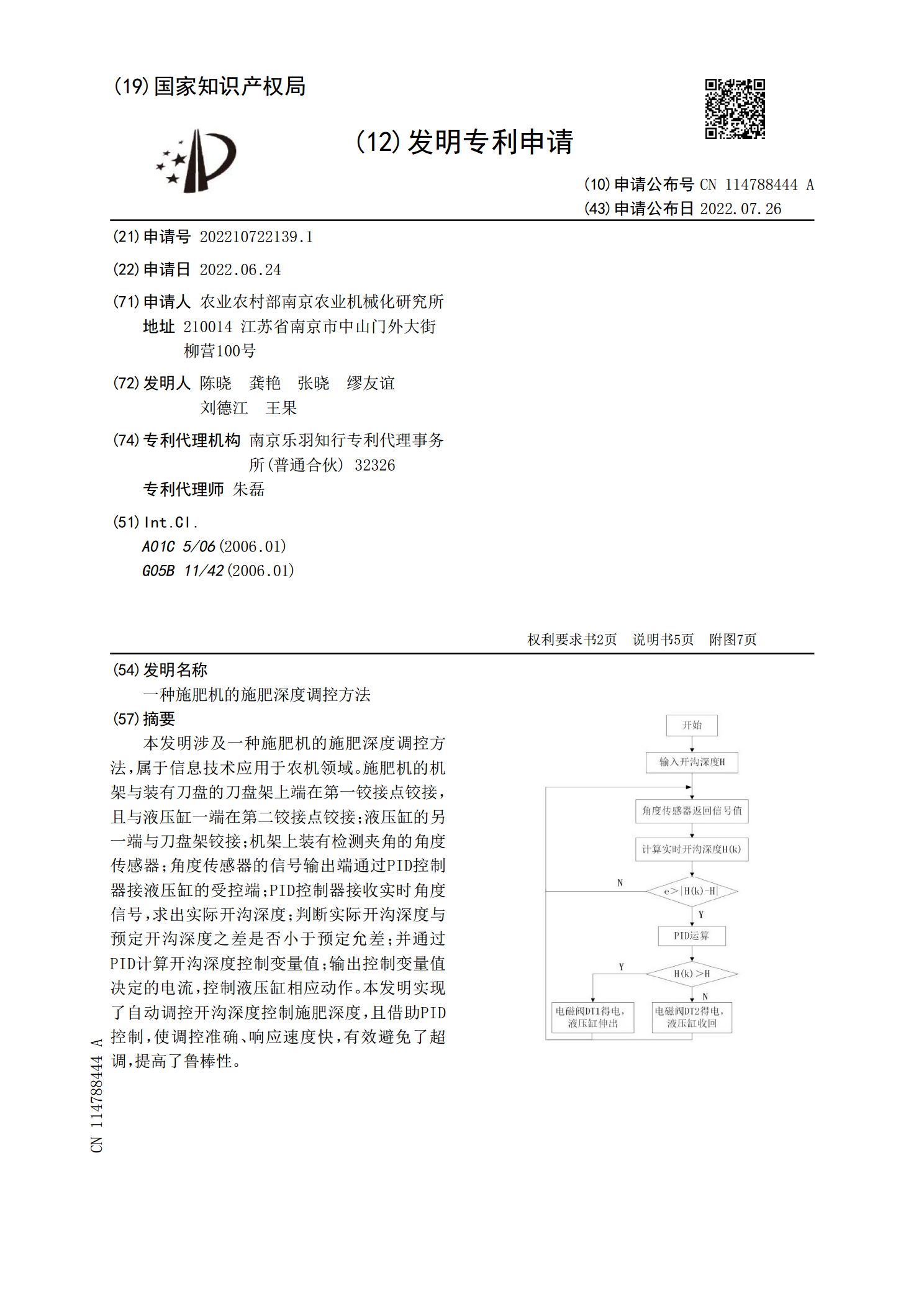
本发明涉及一种施肥机的施肥深度调控方法,属于信息技术应用于农机领域。施肥机的机架与装有刀盘的刀盘架上端在第一铰接点铰接,且与液压缸一端在第二铰接点铰接;液压缸的另一端与刀盘架铰接;机架上装有检测夹角的角度传感器;角度传感器的信号输出端通过PID控制器接液压缸的受控端;PID控制器接收实时角度信号,求出实际开沟深度;判断实际开沟深度与预定开沟深度之差是否小于预定允差;并通过PID计算开沟深度控制变量值;输出控制变量值决定的电流,控制液压缸相应动作。本发明实现了自动调控开沟深度控制施肥深度,且借助PID控制,
自动调控的汽车大灯以及自动调控方法.pdf
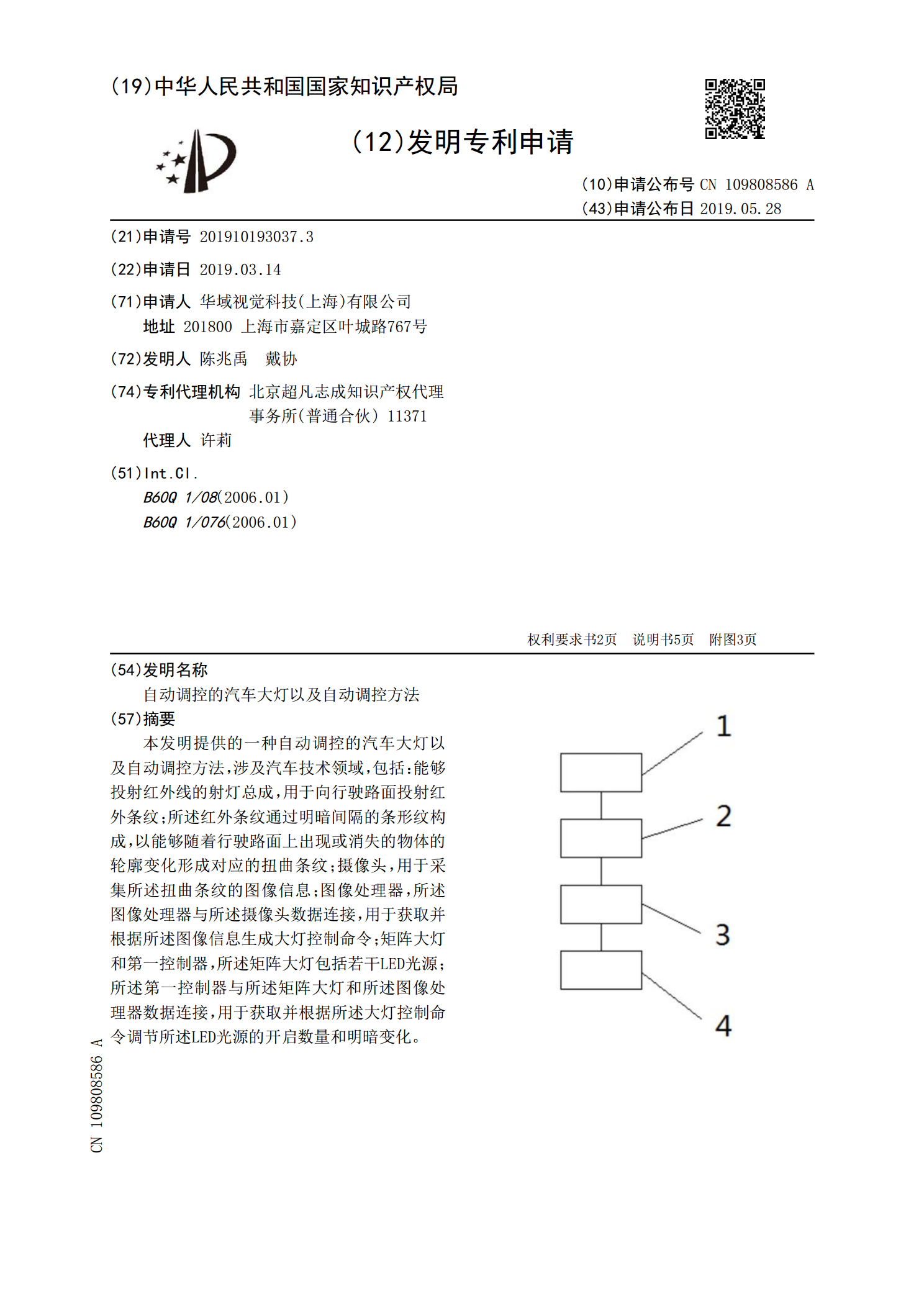
本发明提供的一种自动调控的汽车大灯以及自动调控方法,涉及汽车技术领域,包括:能够投射红外线的射灯总成,用于向行驶路面投射红外条纹;所述红外条纹通过明暗间隔的条形纹构成,以能够随着行驶路面上出现或消失的物体的轮廓变化形成对应的扭曲条纹;摄像头,用于采集所述扭曲条纹的图像信息;图像处理器,所述图像处理器与所述摄像头数据连接,用于获取并根据所述图像信息生成大灯控制命令;矩阵大灯和第一控制器,所述矩阵大灯包括若干LED光源;所述第一控制器与所述矩阵大灯和所述图像处理器数据连接,用于获取并根据所述大灯控制命令调节所

一种分层注水系统自动调控方法.pdf
本发明提供一种分层注水系统自动调控方法,用于解决分层注水中注水层段配注量不达标时,层段如何调整的问题。本发明采取的技术方案是收集影响日配注量的相关参数信息,运用综合评价中的熵权法将多个注水参数转化成能反应不同层段注水情况的总体特征的信息。依据总体特征信息,对实时注水流量调节优先级进行划分,从而制定调整方案,使实际日配注量达到规定标准,降低调节次数,减少对阀门的损耗。该方法是一种快速调节注水量方法,既解决了传统调节时层段选择存在的盲目性问题,又解决了注水层调节层段干扰大、多次重复调节造成经济损失多的问题,实

自动温度调控系统.pdf
本发明公开了一种应用于窑炉焙烧环节的自动温度调控系统,其特征在于:包括相连的温度收集装置、PLC数据处理器、显示操作触摸屏、远程网络计算机、风量变频调节装置、稳压控制器;所述的显示操作触摸屏上有温度零点设置;本发明的优点在于:本系统实现了窑炉焙烧环节的自动温度调控,解决了砖瓦窑炉焙烧环节自动化程度低和单一温度检测的功能问题,减少了传统窑温调控时的人工,提高了产能。