
一种基于对称性引导的物体图像修复方法.pdf

莉娜****ua

1/10

2/10

3/10
4/10
5/10
6/10

7/10
8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于对称性引导的物体图像修复方法.pdf
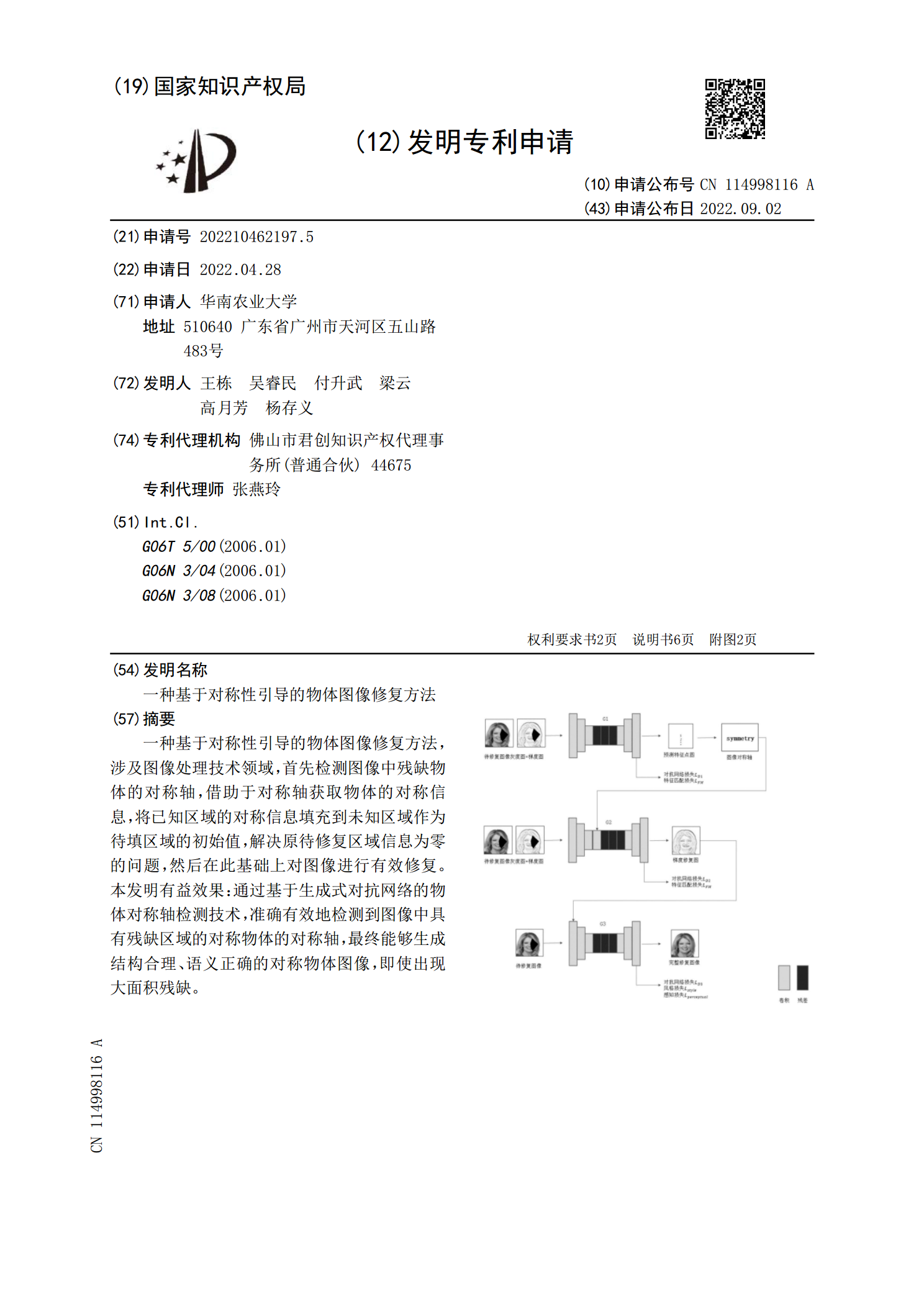
一种基于对称性引导的物体图像修复方法,涉及图像处理技术领域,首先检测图像中残缺物体的对称轴,借助于对称轴获取物体的对称信息,将已知区域的对称信息填充到未知区域作为待填区域的初始值,解决原待修复区域信息为零的问题,然后在此基础上对图像进行有效修复。本发明有益效果:通过基于生成式对抗网络的物体对称轴检测技术,准确有效地检测到图像中具有残缺区域的对称物体的对称轴,最终能够生成结构合理、语义正确的对称物体图像,即使出现大面积残缺。
一种高反光物体图像修复方法.pdf
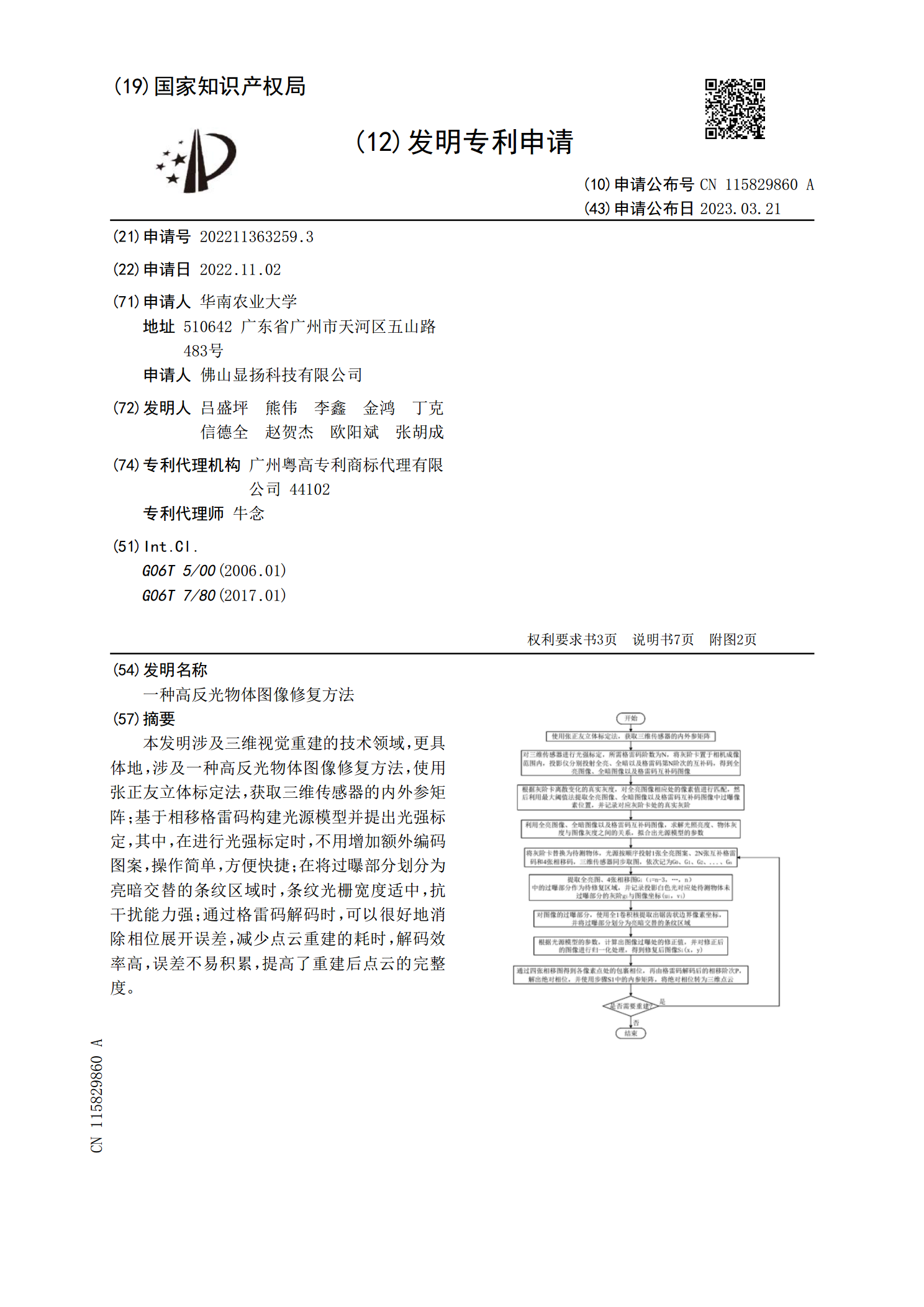
本发明涉及三维视觉重建的技术领域,更具体地,涉及一种高反光物体图像修复方法,使用张正友立体标定法,获取三维传感器的内外参矩阵;基于相移格雷码构建光源模型并提出光强标定,其中,在进行光强标定时,不用增加额外编码图案,操作简单,方便快捷;在将过曝部分划分为亮暗交替的条纹区域时,条纹光栅宽度适中,抗干扰能力强;通过格雷码解码时,可以很好地消除相位展开误差,减少点云重建的耗时,解码效率高,误差不易积累,提高了重建后点云的完整度。

一种基于图像修复的自动水印去除方法.pdf
本发明公开了一种基于图像修复的自动水印去除方法,包括下述步骤:(1)批量导入具有相同分辨率且具有相同水印区域的图片;(2)将导入的图像由RGB模型转换为灰度模型;(3)对转化为灰度模型后的一系列图片进行叠加得到一张叠加灰度图片;(4)对叠加灰度图片应用阈值分割方法获得水印区域;(5)对水印区域膨胀一个像素点获得更大轮廓的区域作为最终水印区域;(6)应用图像修复算法对最终水印区域进行修复并输出修复后的图像。本发明有效地实现了自动识别水印区域并完成自动去除水印的工作,从而提高了水印去除的效率。

一种改进的基于样本的图像修复方法.docx
一种改进的基于样本的图像修复方法概述基于样本的图像修复方法,是在一定范围内找到类似于目标图像的图像片段,并通过这些图像片段进行修复的方法。该方法具有较高的修复效果,广泛应用于数字影像处理、计算机视觉及计算机图形学等领域。本文主要介绍一种改进的基于样本的图像修复方法。该方法在传统基于样本的图像修复方法的基础上,结合了超像素分割算法和特征点匹配算法,以提高修复效果并减少人工干预。传统基于样本的图像修复方法传统基于样本的图像修复方法是在选定的样本集中,寻找最好的匹配,并将其填入修复区域。该方法通常包括以下步骤:

一种数据驱动的物体图像修复系统及方法.pdf
本发明的一种数据驱动的物体图像修复系统及方法,属于图像修复技术领域。本发明的第一个目的是提供一种物体图像修复系统,包括依次连接的用户交互模块、物体匹配模块、形状修复模块和纹理修复模块以及独立的物体图像数据库和数据库标注模块;本发明的第二个目的是提供一种数据驱动的物体图像修复方法框架,包括以下步骤:数据预处理、轮廓与修复区域的标示、物体匹配、形状修复、纹理修复、数据后处理。本发明通过各模块的协同工作,克服了现有图像修复方法无法解决的物体缺失部分形状信息无法启发式推导、缺失部分无法在原图像中采样修复等问题,很