
一种高反光物体图像修复方法.pdf

星菱****23

1/10

2/10
3/10
4/10

5/10

6/10
7/10

8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种高反光物体图像修复方法.pdf
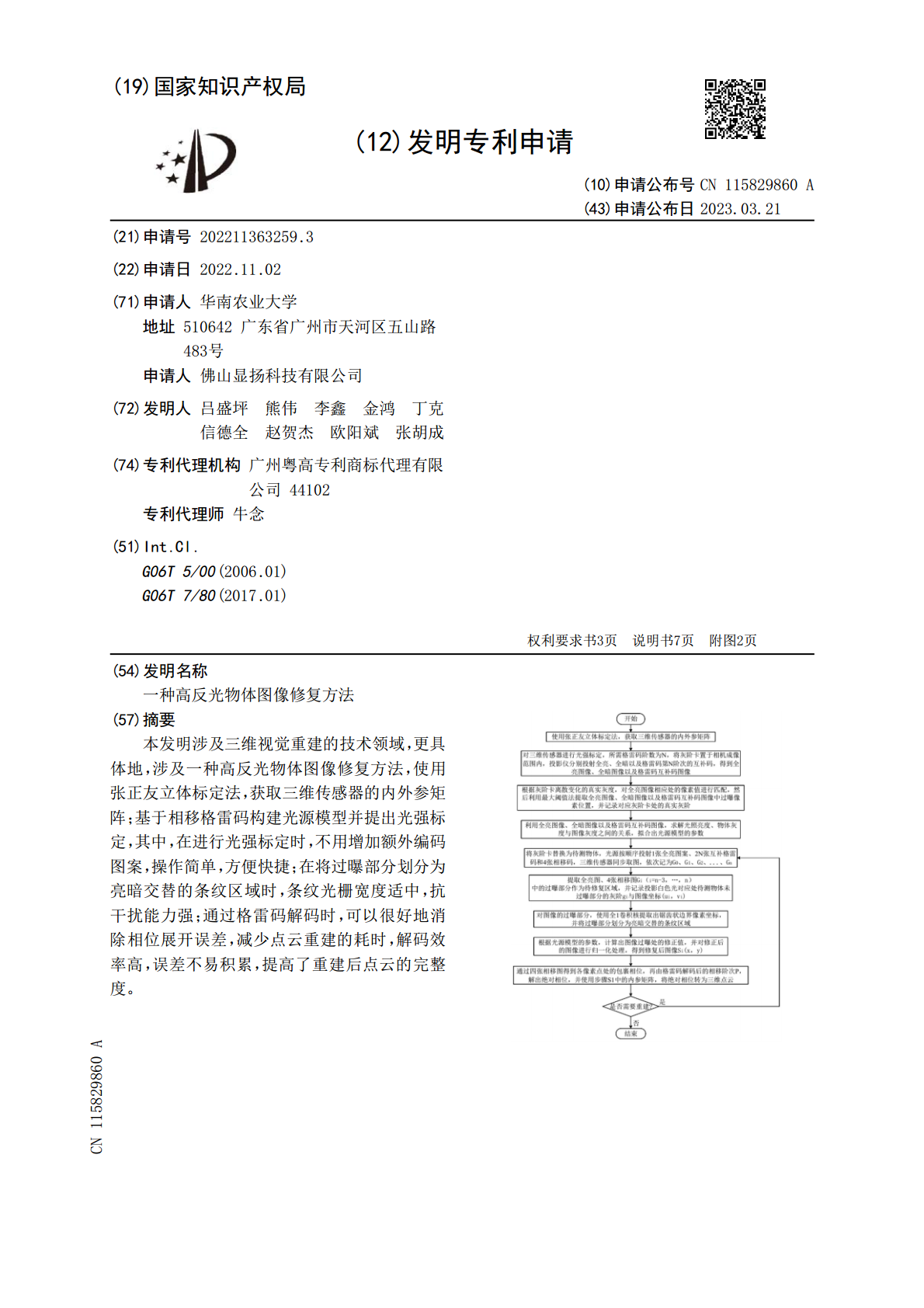
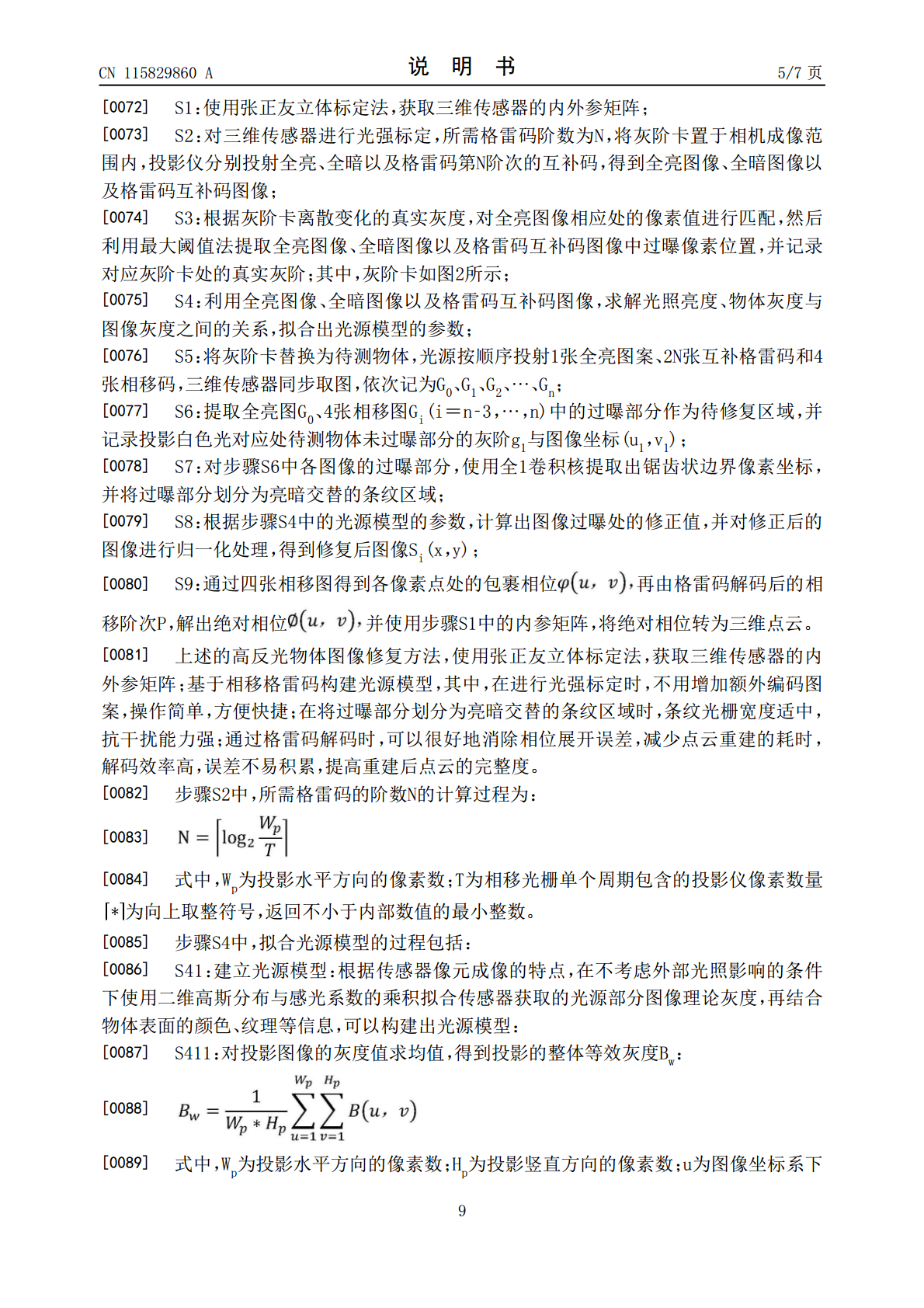
本发明涉及三维视觉重建的技术领域,更具体地,涉及一种高反光物体图像修复方法,使用张正友立体标定法,获取三维传感器的内外参矩阵;基于相移格雷码构建光源模型并提出光强标定,其中,在进行光强标定时,不用增加额外编码图案,操作简单,方便快捷;在将过曝部分划分为亮暗交替的条纹区域时,条纹光栅宽度适中,抗干扰能力强;通过格雷码解码时,可以很好地消除相位展开误差,减少点云重建的耗时,解码效率高,误差不易积累,提高了重建后点云的完整度。
一种高反光物体表面轮廓测量装置及方法.pdf
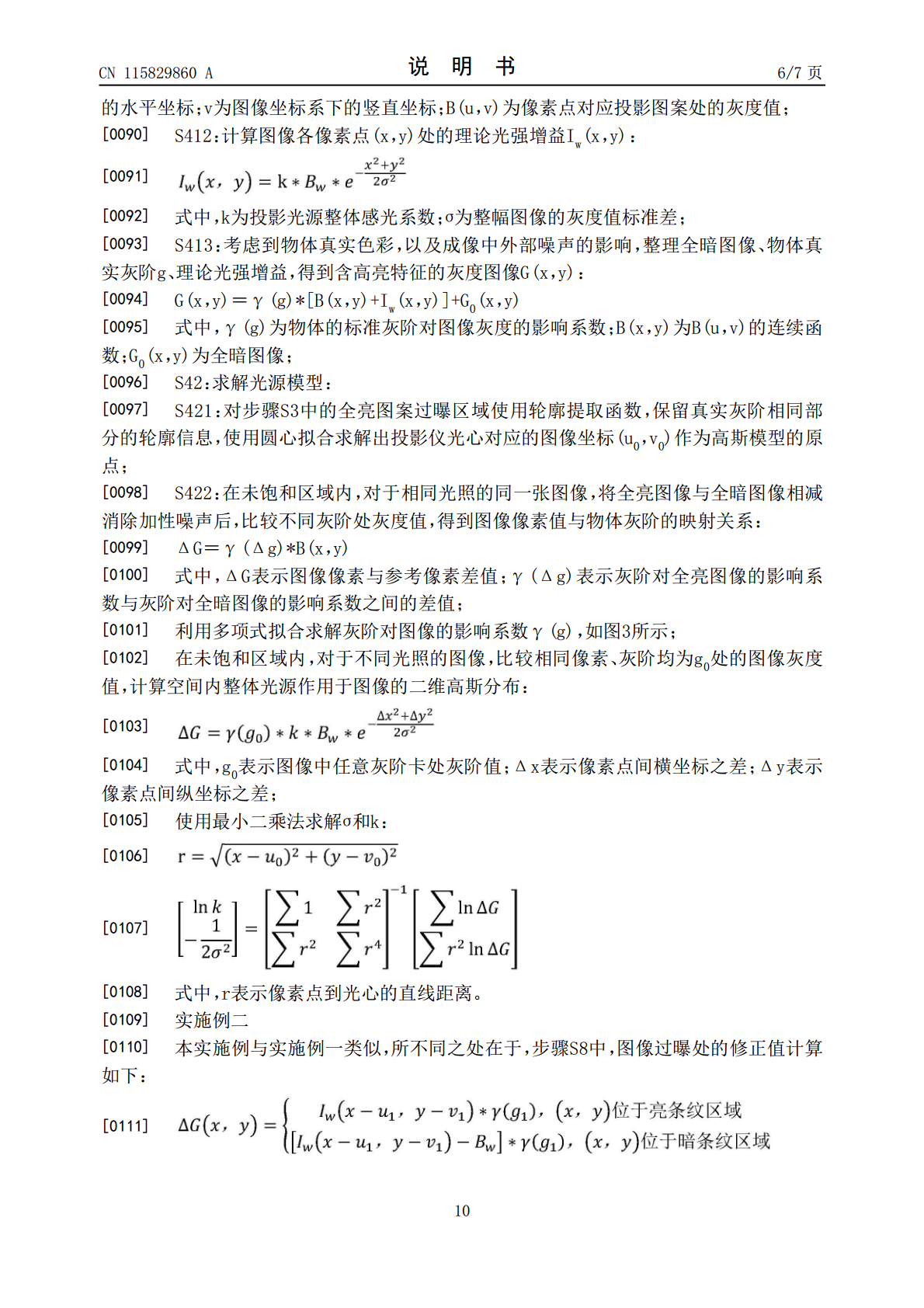
本发明提供了一种基于激光线扫描的高反光物体表面轮廓测量装置,属于三维轮廓测量技术领域。该装置包括:线激光发射器,用于发射线型激光,并使得所述线型激光以第一入射角入射至所述高反光物体的表面;反射投影幕,用于接收由所述高反光物体的表面反射的所述线型激光,以在所述反射投影幕形成一与所述高反光物体的轮廓相关的第一图案;和线扫描相机,用于拍摄所述反射投影幕处的所述第一图案;其中,高反光物体的表面轮廓是基于第一图案获取的。本发明的装置避免了在高反光物体的表面喷涂薄层,因而,不需要在测量前后对高反光物体进行额外处理,提

一种数据驱动的物体图像修复系统及方法.pdf
本发明的一种数据驱动的物体图像修复系统及方法,属于图像修复技术领域。本发明的第一个目的是提供一种物体图像修复系统,包括依次连接的用户交互模块、物体匹配模块、形状修复模块和纹理修复模块以及独立的物体图像数据库和数据库标注模块;本发明的第二个目的是提供一种数据驱动的物体图像修复方法框架,包括以下步骤:数据预处理、轮廓与修复区域的标示、物体匹配、形状修复、纹理修复、数据后处理。本发明通过各模块的协同工作,克服了现有图像修复方法无法解决的物体缺失部分形状信息无法启发式推导、缺失部分无法在原图像中采样修复等问题,很
一种基于对称性引导的物体图像修复方法.pdf
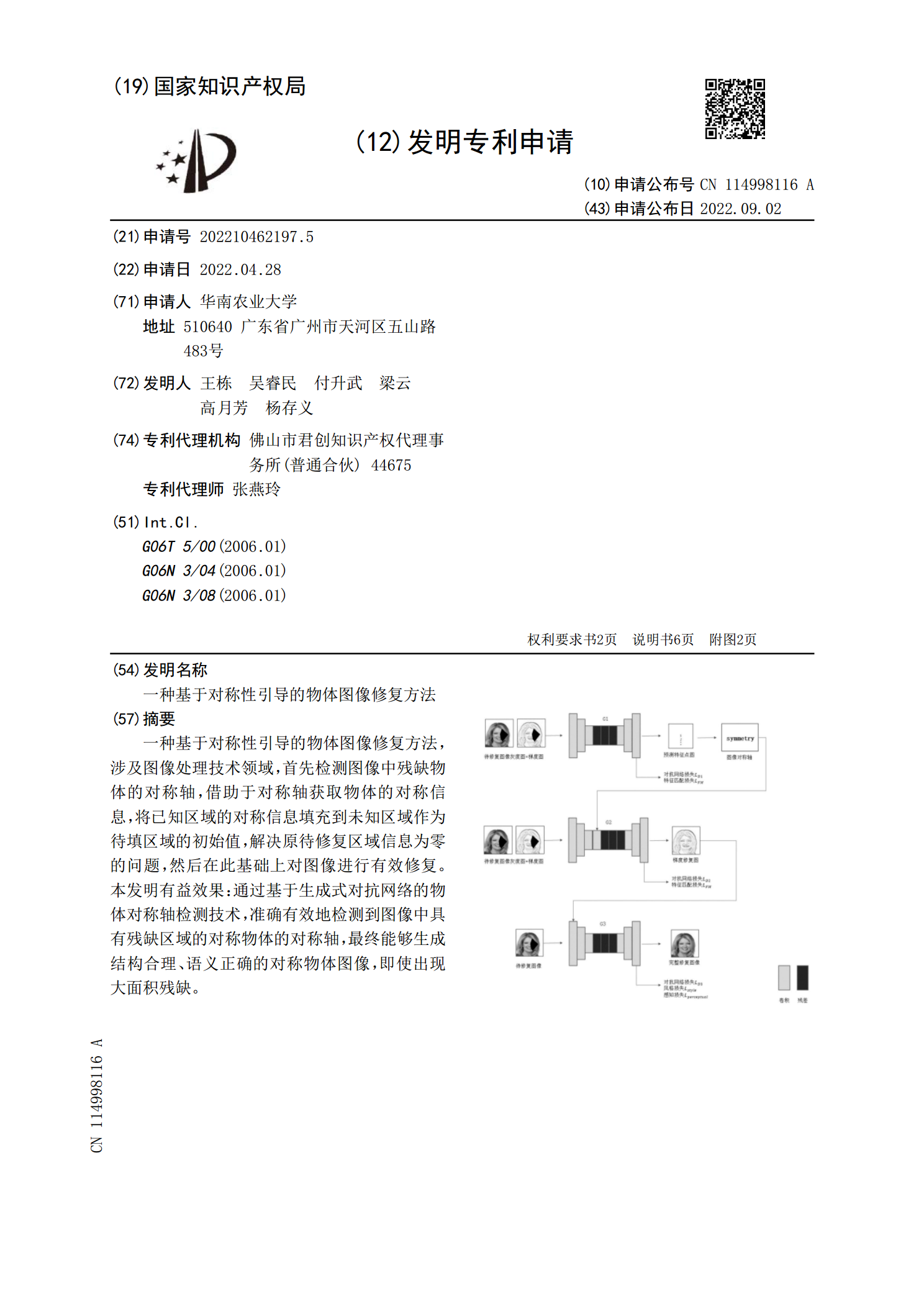
一种基于对称性引导的物体图像修复方法,涉及图像处理技术领域,首先检测图像中残缺物体的对称轴,借助于对称轴获取物体的对称信息,将已知区域的对称信息填充到未知区域作为待填区域的初始值,解决原待修复区域信息为零的问题,然后在此基础上对图像进行有效修复。本发明有益效果:通过基于生成式对抗网络的物体对称轴检测技术,准确有效地检测到图像中具有残缺区域的对称物体的对称轴,最终能够生成结构合理、语义正确的对称物体图像,即使出现大面积残缺。

基于双目面结构光的高反光物体自适应条纹方法.docx
基于双目面结构光的高反光物体自适应条纹方法基于双目面结构光的高反光物体自适应条纹方法摘要:随着科技的不断进步,面对高反光物体的三维形状恢复问题愈发显得重要。本文基于双目面结构光技术,提出了一种自适应条纹方法,可以有效解决高反光物体的形状恢复问题。实验结果表明,所提出的方法在恢复高反光物体的形状方面具有良好的效果。关键词:高反光物体,双目视觉,面结构光,自适应条纹1.引言高反光物体在光照条件不均的情况下,其表面会出现明显的反光区域,使得传统的三维形状恢复方法失效。因此,研究如何在高反光物体上进行精确的形状恢