
一种智慧农机整平轨迹绘制方法、系统、农机及存储介质.pdf

雨巷****珺琦

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10

10/10
亲,该文档总共22页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种智慧农机整平轨迹绘制方法、系统、农机及存储介质.pdf
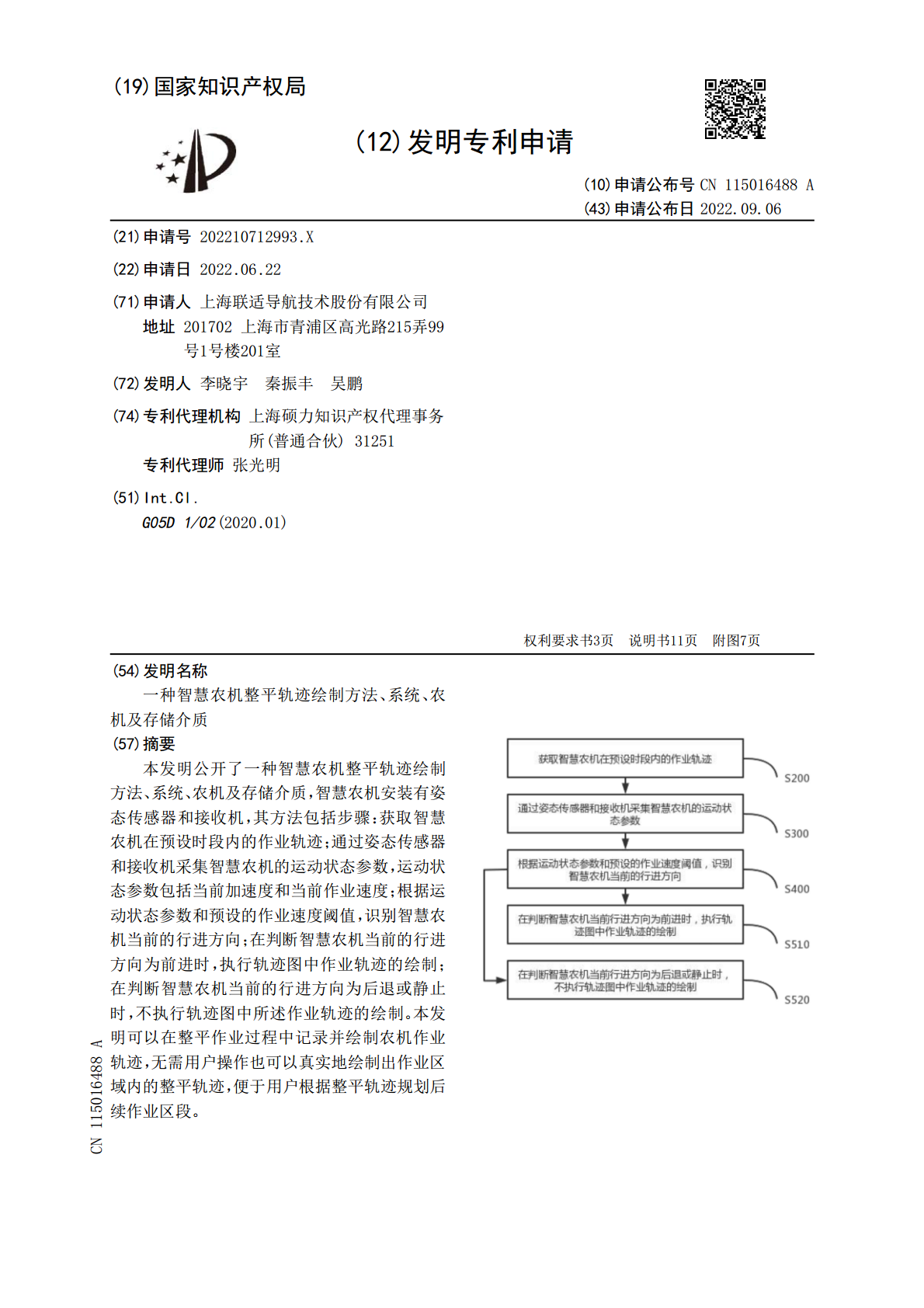
本发明公开了一种智慧农机整平轨迹绘制方法、系统、农机及存储介质,智慧农机安装有姿态传感器和接收机,其方法包括步骤:获取智慧农机在预设时段内的作业轨迹;通过姿态传感器和接收机采集智慧农机的运动状态参数,运动状态参数包括当前加速度和当前作业速度;根据运动状态参数和预设的作业速度阈值,识别智慧农机当前的行进方向;在判断智慧农机当前的行进方向为前进时,执行轨迹图中作业轨迹的绘制;在判断智慧农机当前的行进方向为后退或静止时,不执行轨迹图中所述作业轨迹的绘制。本发明可以在整平作业过程中记录并绘制农机作业轨迹,无需用户
一种农机作业路径自动规划方法、系统、农机及存储介质.pdf
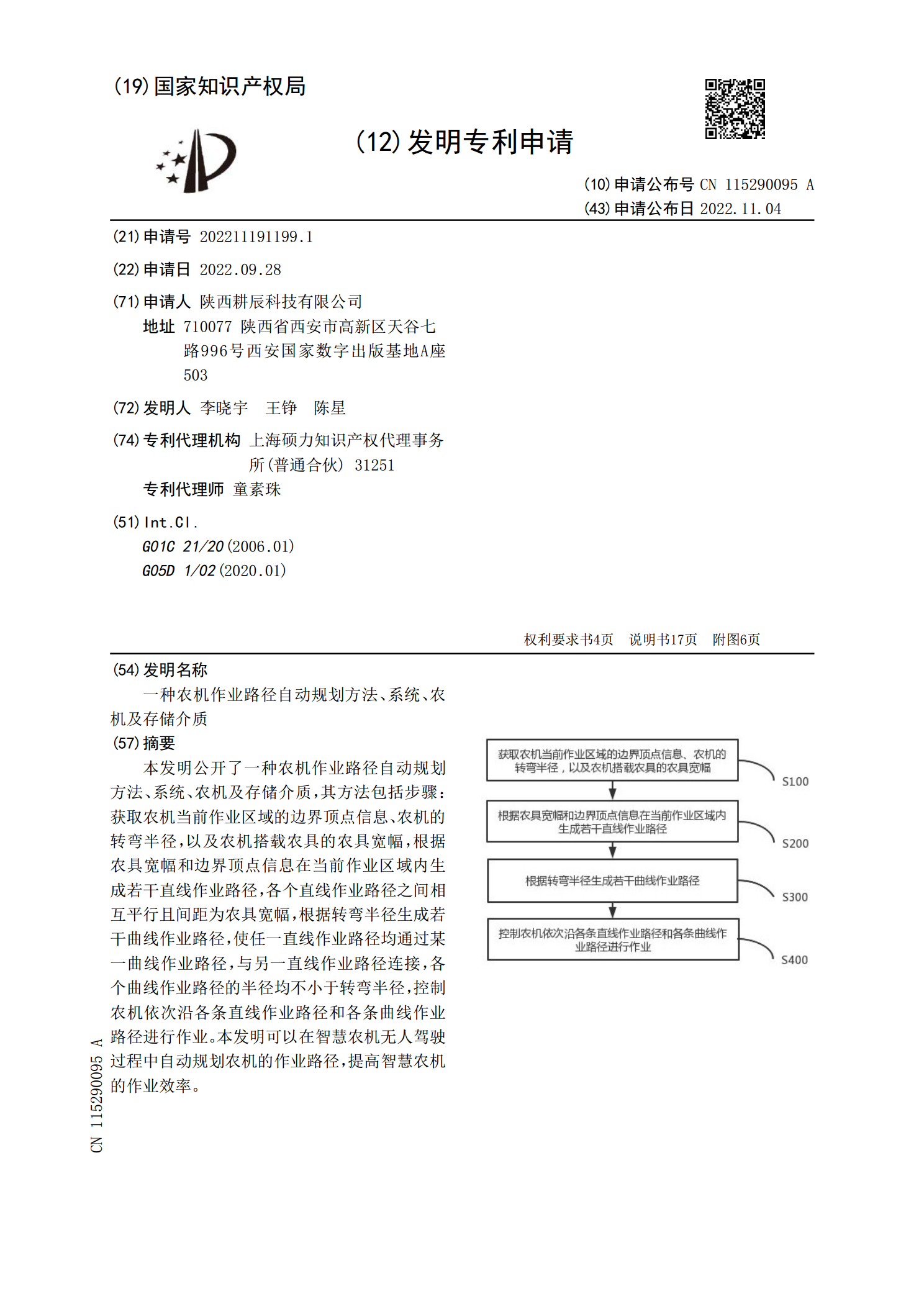
本发明公开了一种农机作业路径自动规划方法、系统、农机及存储介质,其方法包括步骤:获取农机当前作业区域的边界顶点信息、农机的转弯半径,以及农机搭载农具的农具宽幅,根据农具宽幅和边界顶点信息在当前作业区域内生成若干直线作业路径,各个直线作业路径之间相互平行且间距为农具宽幅,根据转弯半径生成若干曲线作业路径,使任一直线作业路径均通过某一曲线作业路径,与另一直线作业路径连接,各个曲线作业路径的半径均不小于转弯半径,控制农机依次沿各条直线作业路径和各条曲线作业路径进行作业。本发明可以在智慧农机无人驾驶过程中自动规划
农机收边方法、装置、农机及存储介质.pdf
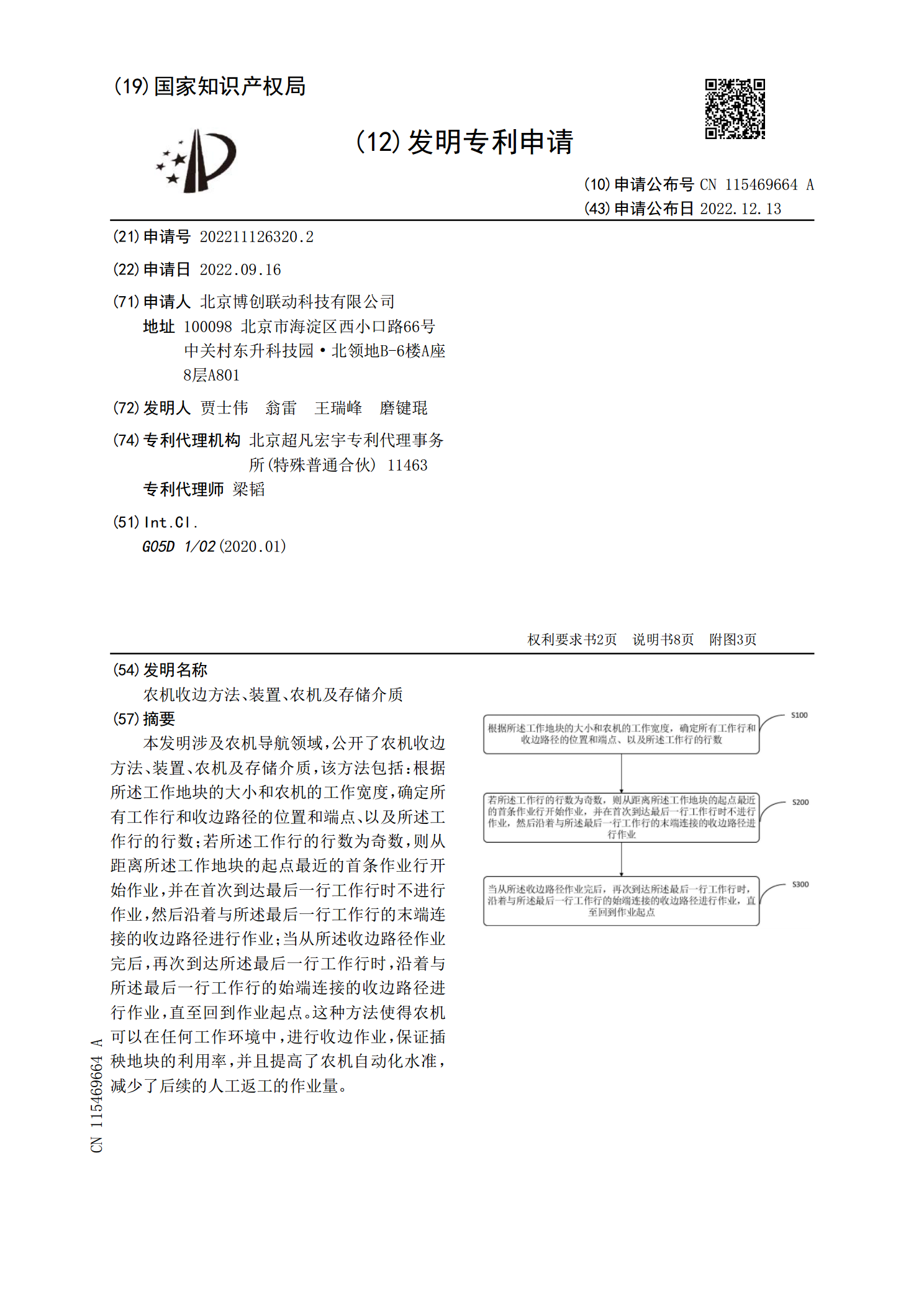
本发明涉及农机导航领域,公开了农机收边方法、装置、农机及存储介质,该方法包括:根据所述工作地块的大小和农机的工作宽度,确定所有工作行和收边路径的位置和端点、以及所述工作行的行数;若所述工作行的行数为奇数,则从距离所述工作地块的起点最近的首条作业行开始作业,并在首次到达最后一行工作行时不进行作业,然后沿着与所述最后一行工作行的末端连接的收边路径进行作业;当从所述收边路径作业完后,再次到达所述最后一行工作行时,沿着与所述最后一行工作行的始端连接的收边路径进行作业,直至回到作业起点。这种方法使得农机可以在任何工
一种平面轨迹绘制方法、装置、设备及存储介质.pdf
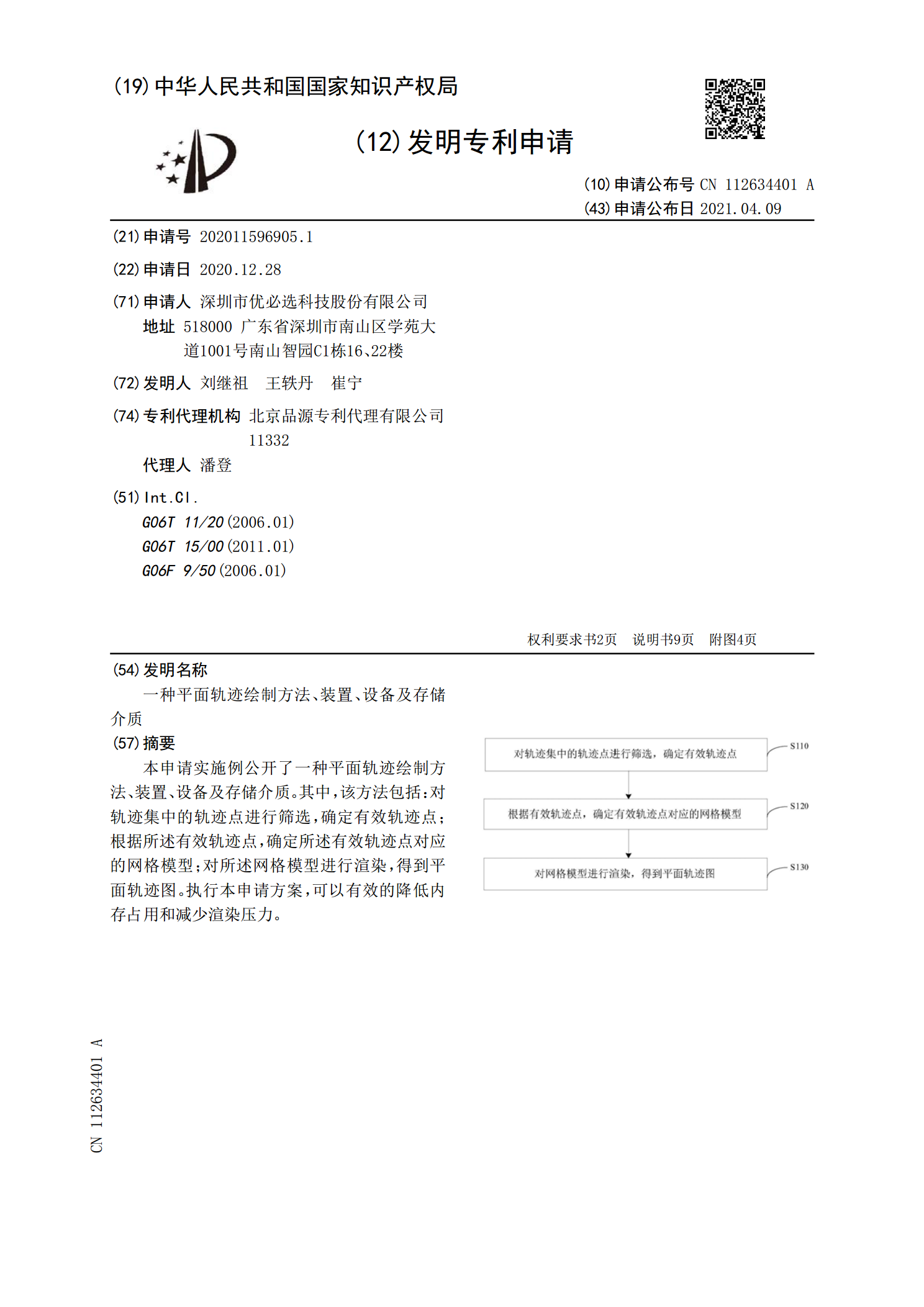
本申请实施例公开了一种平面轨迹绘制方法、装置、设备及存储介质。其中,该方法包括:对轨迹集中的轨迹点进行筛选,确定有效轨迹点;根据所述有效轨迹点,确定所述有效轨迹点对应的网格模型;对所述网格模型进行渲染,得到平面轨迹图。执行本申请方案,可以有效的降低内存占用和减少渲染压力。

基于目标检测的农机避障方法、装置、农机、存储介质.pdf
本发明提供了一种基于目标检测的农机避障方法、装置、农机、存储介质,方法包括:根据预先规划好的初始路径信息进行作业和控制摄像头采集目标图像;然后,从目标图像中识别出作业区域,根据路径区域和作业区域确定目标检测区域;然后,基于预设的目标检测算法,在目标检测区域进行目标检测,得到多个待识别对象,并识别出目标避障对象,基于预设的避障算法,根据目标避障对象在目标图像中所处的位置确定避障路径信息;根据避障路径信息控制驱动装置进行避障。根据本实施例的技术方案,能够排除农机的作业设备对目标检测的干扰,并且根据待识别对象的