
一种农机作业路径自动规划方法、系统、农机及存储介质.pdf

诗文****仙女


1/10

2/10
3/10
4/10

5/10

6/10
7/10

8/10

9/10

10/10
亲,该文档总共28页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种农机作业路径自动规划方法、系统、农机及存储介质.pdf
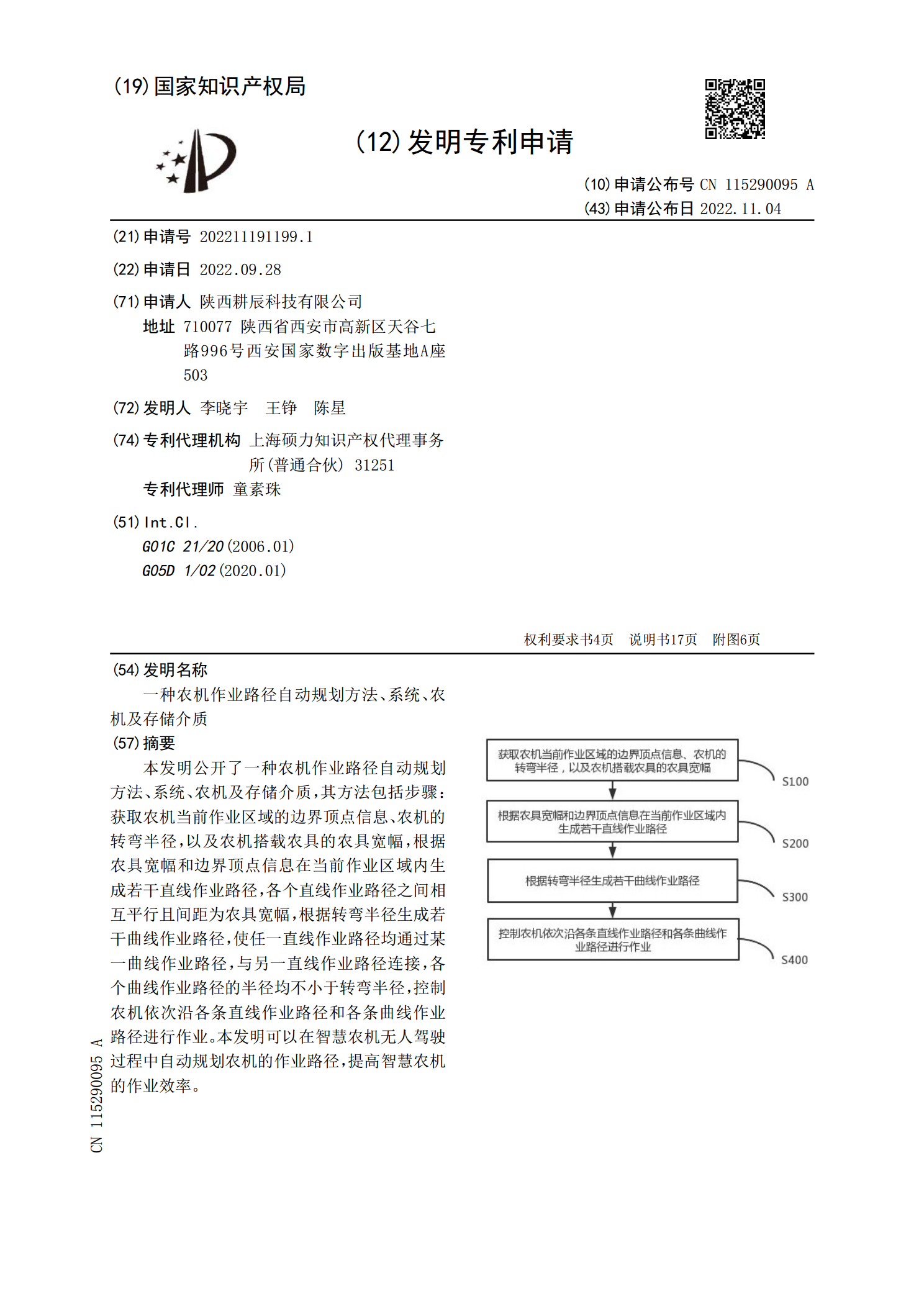
本发明公开了一种农机作业路径自动规划方法、系统、农机及存储介质,其方法包括步骤:获取农机当前作业区域的边界顶点信息、农机的转弯半径,以及农机搭载农具的农具宽幅,根据农具宽幅和边界顶点信息在当前作业区域内生成若干直线作业路径,各个直线作业路径之间相互平行且间距为农具宽幅,根据转弯半径生成若干曲线作业路径,使任一直线作业路径均通过某一曲线作业路径,与另一直线作业路径连接,各个曲线作业路径的半径均不小于转弯半径,控制农机依次沿各条直线作业路径和各条曲线作业路径进行作业。本发明可以在智慧农机无人驾驶过程中自动规划

一种无人驾驶自动作业方法、系统、农机车辆和存储介质.pdf
本发明公开了一种无人驾驶自动作业方法、系统、农机车辆和存储介质,方法包括:获取农机的作业区域对应的环境地图;获取所述农机当前已挂载农具的农具相关信息,根据应用软件中的设置参数和所述农具相关信息分析得到目标作业场景;根据所述目标作业场景、农机相关信息确定目标操作指令;在所述作业区域内行驶过程中,根据所述环境地图控制所述已挂载农具执行所述目标操作指令以实现无人作业。本发明无需人工调度,减少人工的作业劳动强度,降低农事作业的人力成本。

一种农机路径规划方法及系统.pdf
本发明公开了一种农机路径规划方法及系统,根据农田最长的一条边是否为直线,若是,则农田形状规则,若否,则农田形状不规则;若农田形状规则,则规划路径通过与所述直线相对应的直线函数表示,并经过平移后,形成新的直线函数,将新的直线函数作为路径跟踪的依据;若农田形状不规则,则规划路径通过对农田长边坐标采样后形成稀疏离散坐标点集合,根据农机当前与稀疏路径的位置关系,将稀疏路径截取部分离散点作为局部路径,再经路径平移后,形成新的局部路径,再对稀疏的局部路径插值后形成稠密的局部路径,将稠密的局部路径作为路径跟踪的依据。优

一种智慧农机整平轨迹绘制方法、系统、农机及存储介质.pdf
本发明公开了一种智慧农机整平轨迹绘制方法、系统、农机及存储介质,智慧农机安装有姿态传感器和接收机,其方法包括步骤:获取智慧农机在预设时段内的作业轨迹;通过姿态传感器和接收机采集智慧农机的运动状态参数,运动状态参数包括当前加速度和当前作业速度;根据运动状态参数和预设的作业速度阈值,识别智慧农机当前的行进方向;在判断智慧农机当前的行进方向为前进时,执行轨迹图中作业轨迹的绘制;在判断智慧农机当前的行进方向为后退或静止时,不执行轨迹图中所述作业轨迹的绘制。本发明可以在整平作业过程中记录并绘制农机作业轨迹,无需用户
农机收边方法、装置、农机及存储介质.pdf
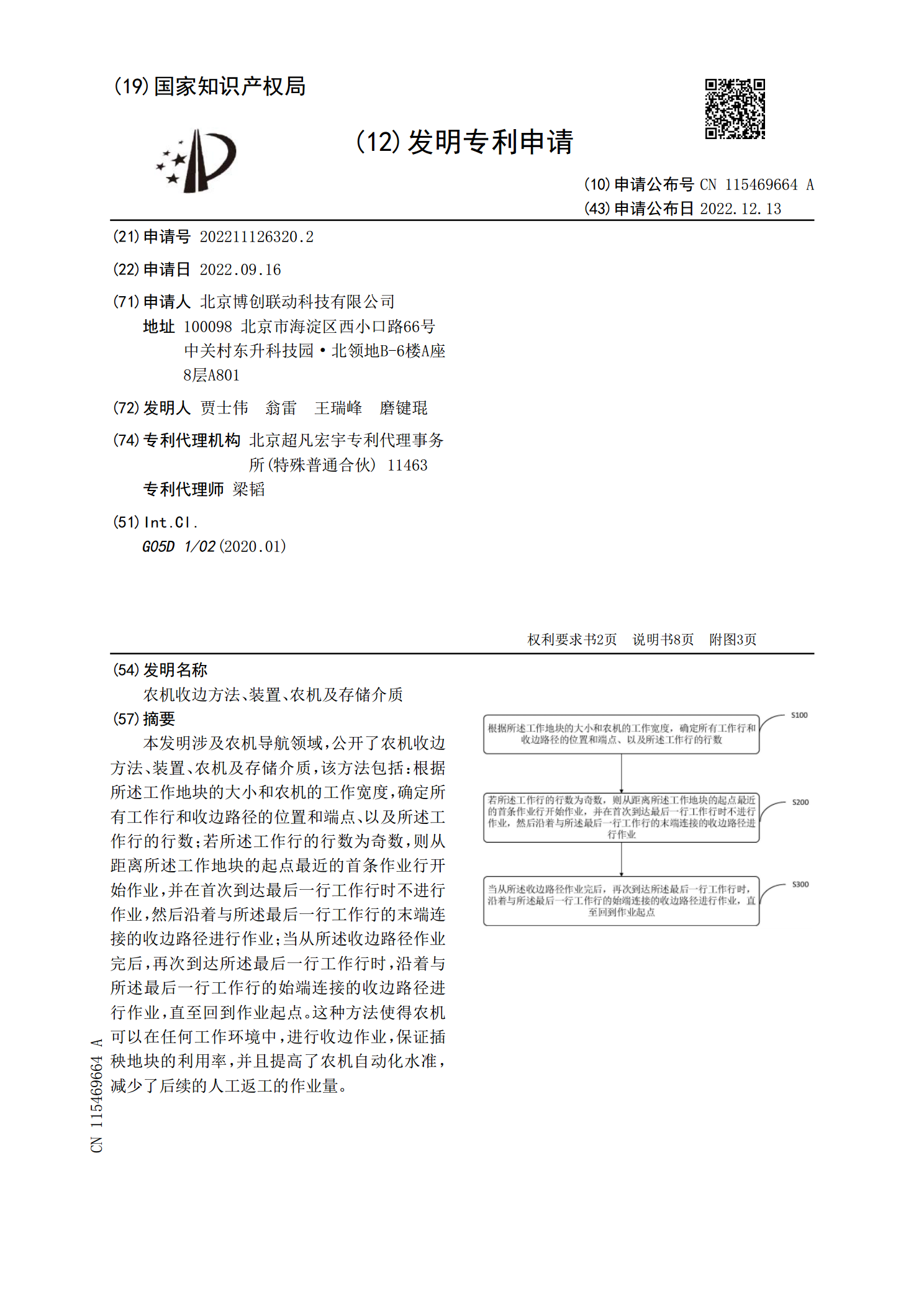
本发明涉及农机导航领域,公开了农机收边方法、装置、农机及存储介质,该方法包括:根据所述工作地块的大小和农机的工作宽度,确定所有工作行和收边路径的位置和端点、以及所述工作行的行数;若所述工作行的行数为奇数,则从距离所述工作地块的起点最近的首条作业行开始作业,并在首次到达最后一行工作行时不进行作业,然后沿着与所述最后一行工作行的末端连接的收边路径进行作业;当从所述收边路径作业完后,再次到达所述最后一行工作行时,沿着与所述最后一行工作行的始端连接的收边路径进行作业,直至回到作业起点。这种方法使得农机可以在任何工