
基于机器视觉的无人渔场鱼类产品分级装备及方法.pdf

一条****然后

1/10

2/10

3/10
4/10

5/10
6/10
7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
基于机器视觉的无人渔场鱼类产品分级装备及方法.pdf
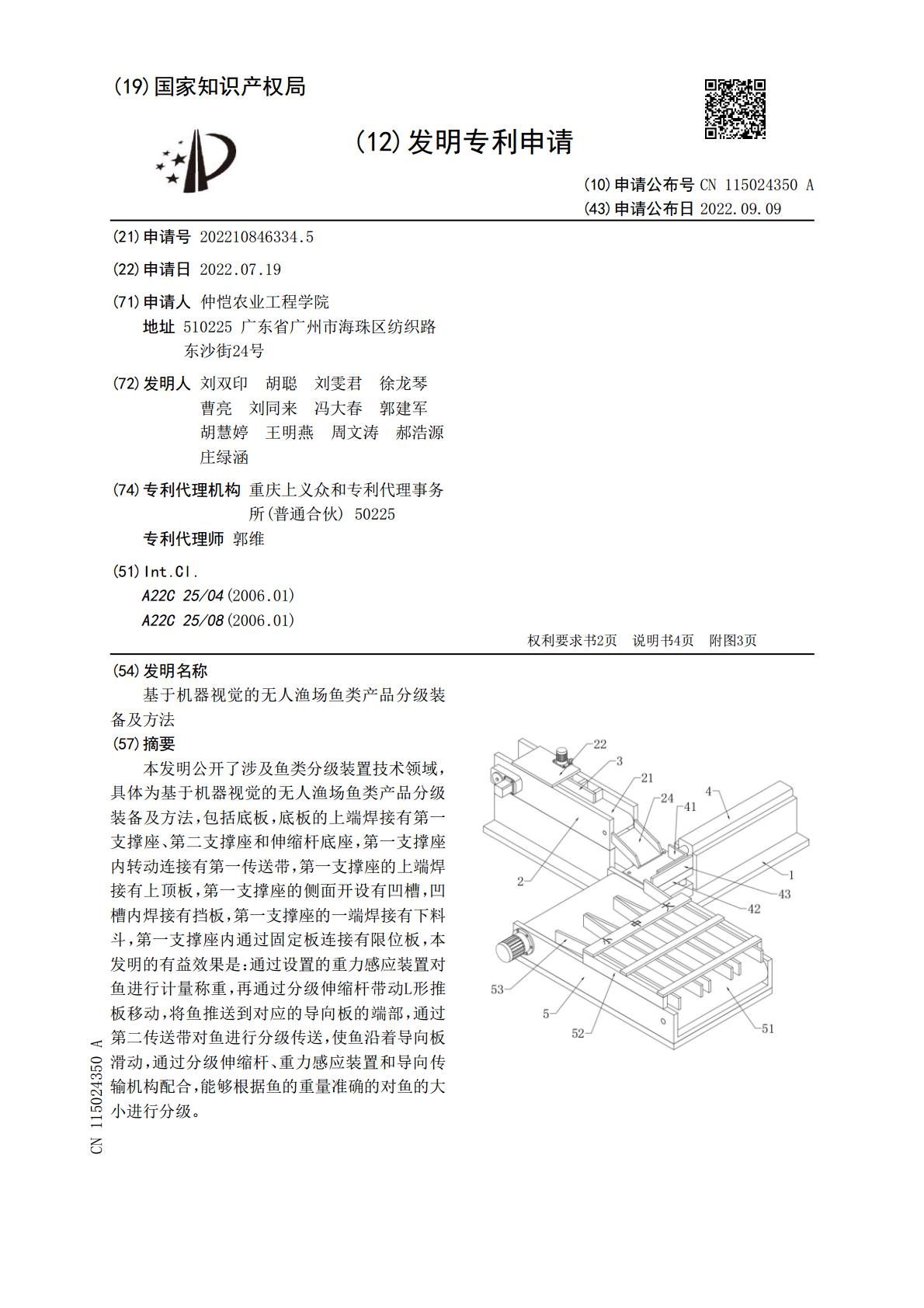
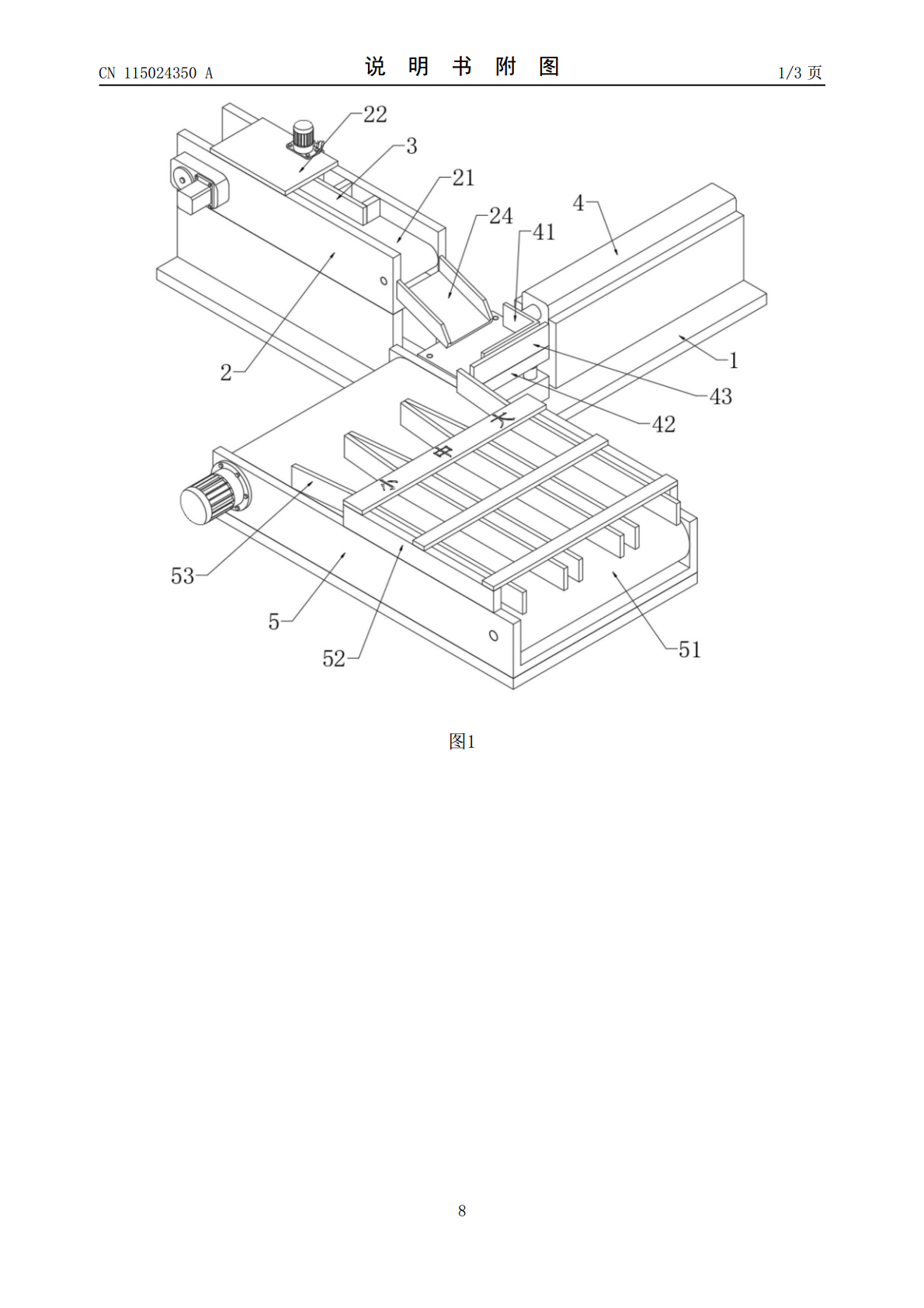
本发明公开了涉及鱼类分级装置技术领域,具体为基于机器视觉的无人渔场鱼类产品分级装备及方法,包括底板,底板的上端焊接有第一支撑座、第二支撑座和伸缩杆底座,第一支撑座内转动连接有第一传送带,第一支撑座的上端焊接有上顶板,第一支撑座的侧面开设有凹槽,凹槽内焊接有挡板,第一支撑座的一端焊接有下料斗,第一支撑座内通过固定板连接有限位板,本发明的有益效果是:通过设置的重力感应装置对鱼进行计量称重,再通过分级伸缩杆带动L形推板移动,将鱼推送到对应的导向板的端部,通过第二传送带对鱼进行分级传送,使鱼沿着导向板滑动,通过分

基于机器视觉的海产品外观品质分级方法.docx
基于机器视觉的海产品外观品质分级方法标题:基于机器视觉的海产品外观品质分级方法摘要:随着人们对食品安全和品质的关注日益提高,海产品外观品质的评估变得越来越重要。传统的品质评估方法依赖于人工判断,耗时且主观性强。本文提出了一种基于机器视觉的海产品外观品质分级方法。该方法利用机器学习和图像处理技术,结合特征提取和模式识别算法,对海产品的外观图像进行分析和评估,实现了对海产品外观品质的自动分级。实验结果表明,该方法具有良好的准确性和实用性,可用于海产品品质的自动化评估。引言:海产品是人们日常生活中重要的食物来源

基于鱼群摄食行为的无人渔场精准投喂装备及方法.pdf
本发明公开了基于鱼群摄食行为的无人渔场精准投喂装备,包括用于无人渔场的投料箱,投料箱的侧面设置有连接座,投料箱的侧面设置有圆柱腔体,圆柱腔体的开口处设置有安装板,安装板上通过轴承转动连接有传动轴,传动轴上设置有搅拌板,投料箱的顶部设置有储料箱,储料箱的顶部设置有盖板,储料箱与投料箱之间设置有入料通道,投料箱上位于圆柱腔体的顶部设置有便于间隙调节的开合组件,投料箱上位于圆柱腔体的底部设置具有防堵塞功能的撒料组件;通过通过投料箱中的搅拌板的转动,触发封板间隙上下转动而进行入料,搅拌板的转动搅拌将饲料输送至微孔

基于机器视觉的烟叶自动分级方法研究.pptx
基于机器视觉的烟叶自动分级方法研究目录添加目录项标题机器视觉技术概述机器视觉技术原理机器视觉在烟叶分级中的应用机器视觉的优势与挑战烟叶自动分级系统设计系统硬件组成系统软件设计数据采集与处理分级算法设计烟叶特征提取与识别烟叶颜色特征提取烟叶纹理特征提取烟叶形状特征提取烟叶等级的智能识别分级结果评估与优化分级准确度评估分级效率评估分级结果优化策略分级算法改进与提高应用前景与展望在烟草行业的应用前景在其他农产品分级中的应用技术发展趋势与展望感谢观看

基于机器视觉的苹果大小自动分级方法.ppt
基于机器视觉的苹果大小自动分级方法摘要1分级系统构成及图像采集过程1.1分级系统构成1.2图像采集过程2视觉检测样本图像处理2.1背景去除去除背景后的图像如图2所示。2.2二值化灰度图像如图3所示。二值化图像如图4所示。2.3图像平滑平滑处理图像如图5所示。2.4特征量提取2.5图像标定3自动分级3.1分级原理3.2分级结果分析4结论谢谢