
在线分级的果品采摘机器人及方法.pdf

闪闪****魔王

1/8
2/8
3/8
4/8
5/8
6/8
7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
在线分级的果品采摘机器人及方法.pdf
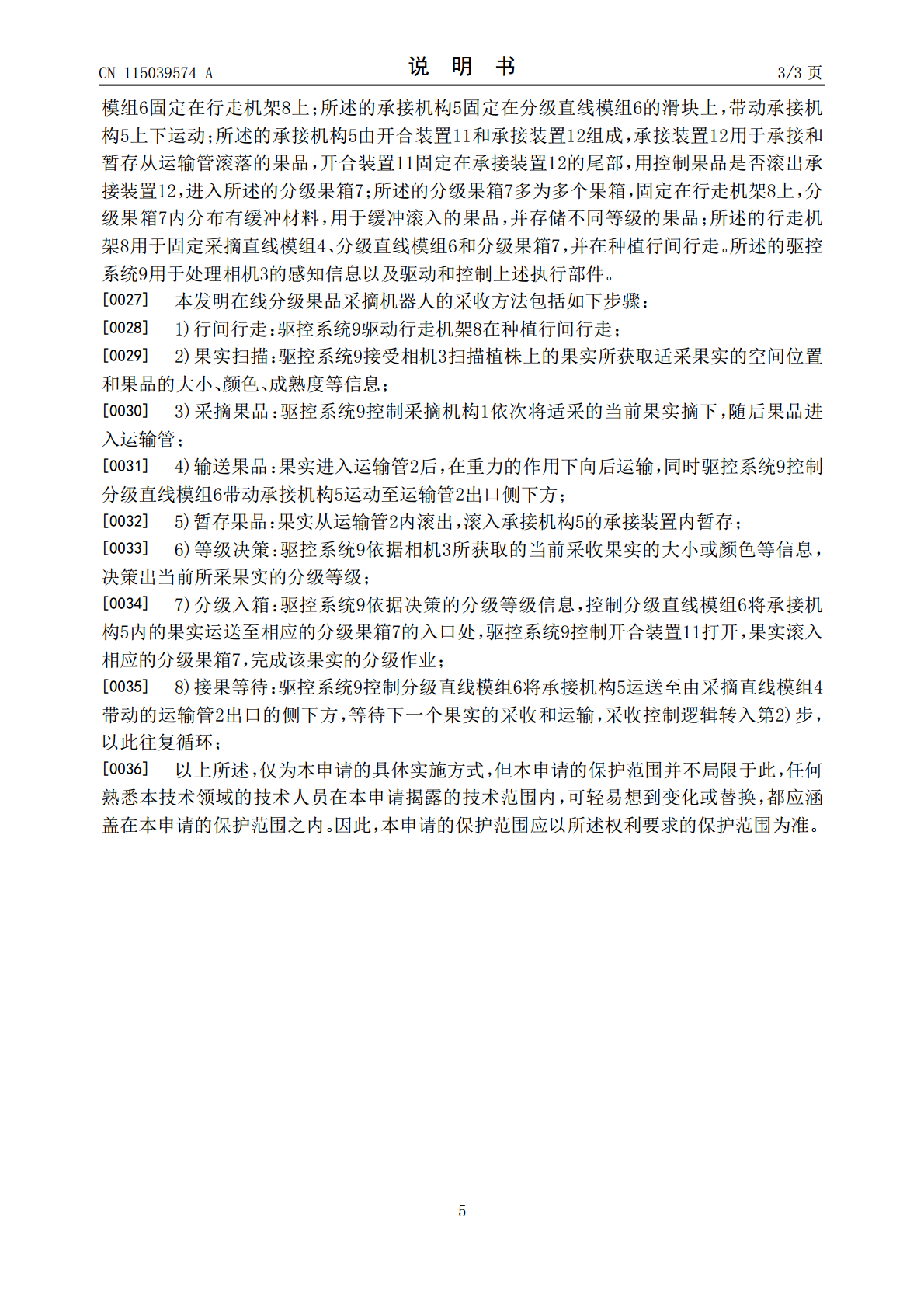
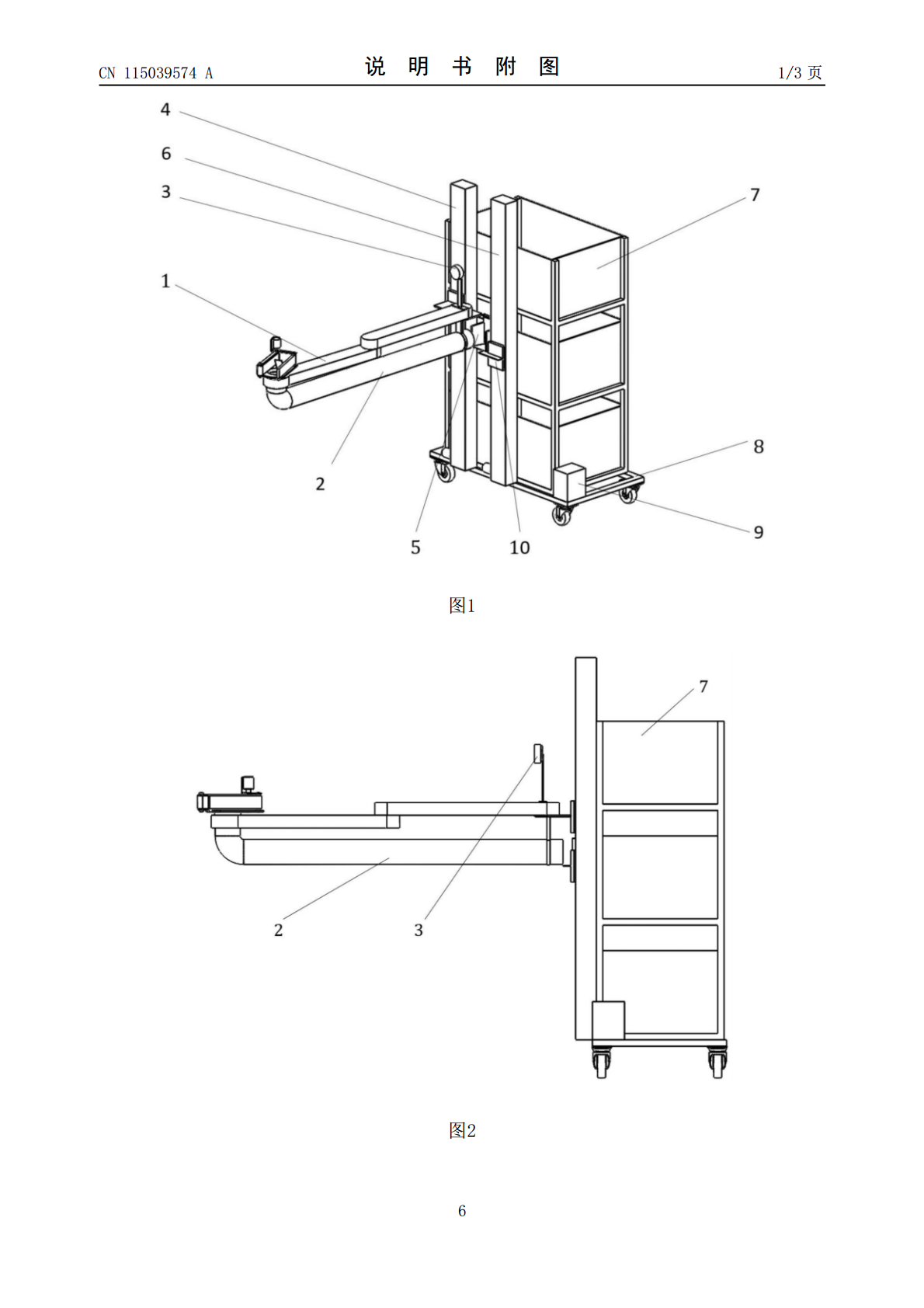
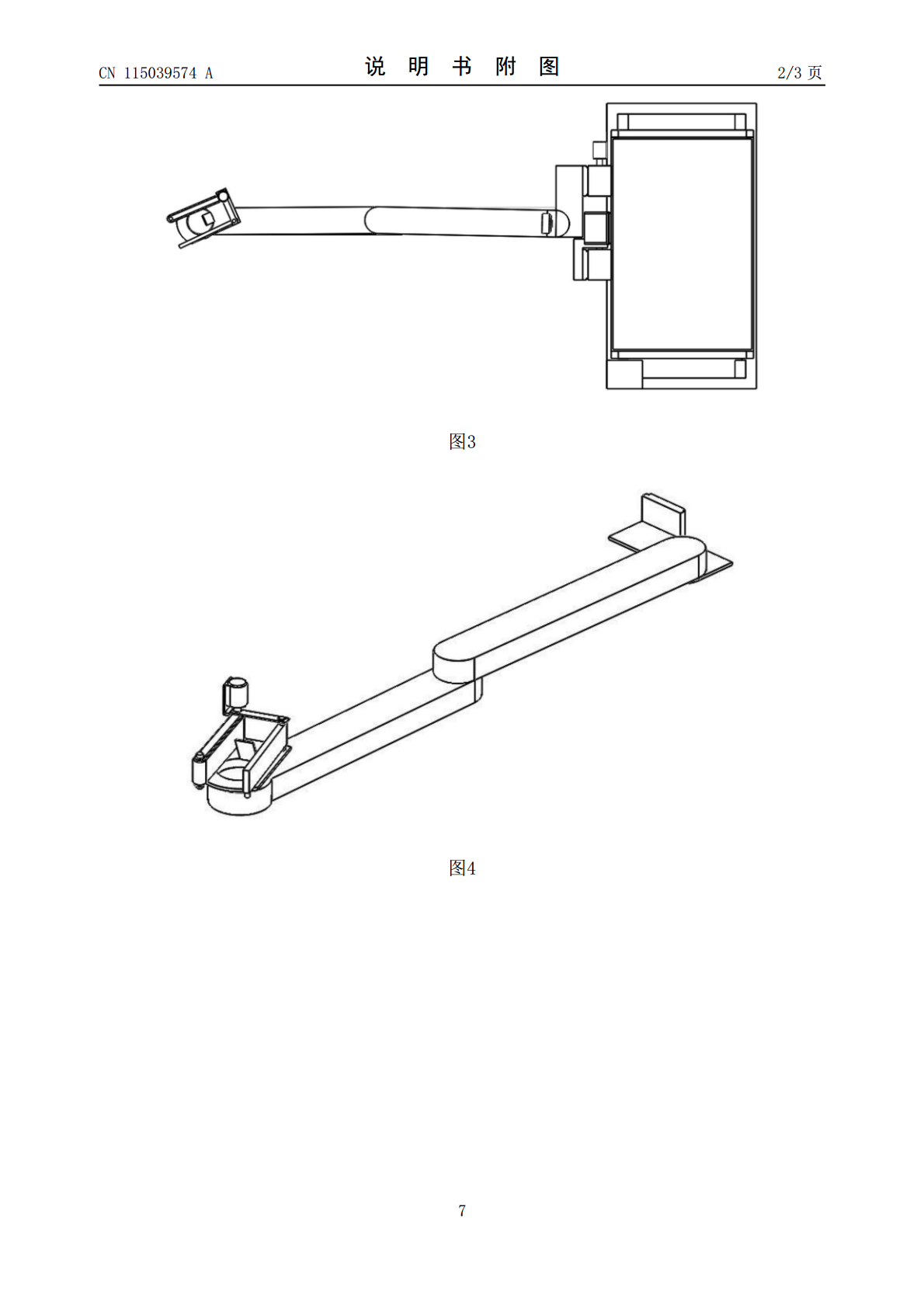
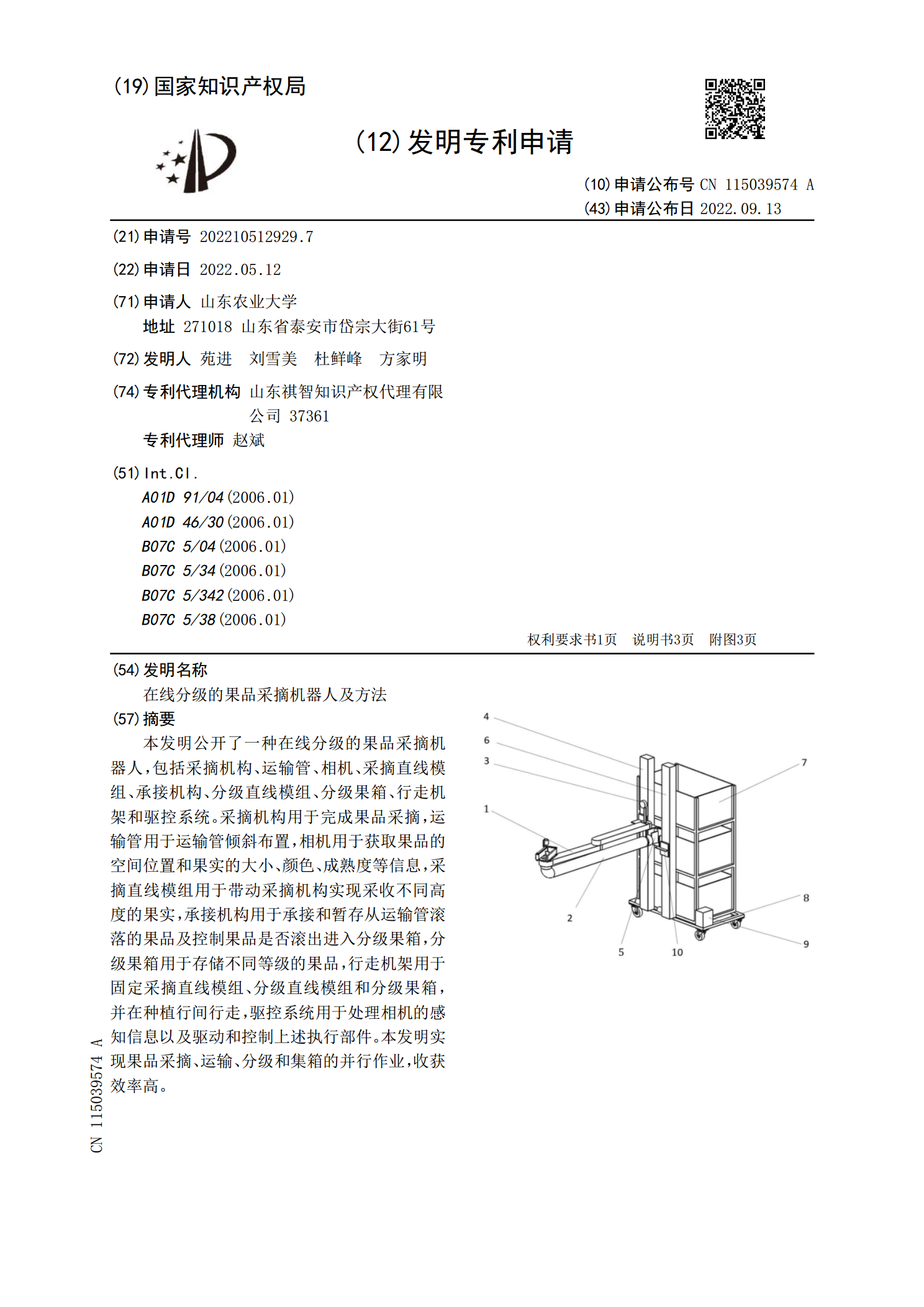
本发明公开了一种在线分级的果品采摘机器人,包括采摘机构、运输管、相机、采摘直线模组、承接机构、分级直线模组、分级果箱、行走机架和驱控系统。采摘机构用于完成果品采摘,运输管用于运输管倾斜布置,相机用于获取果品的空间位置和果实的大小、颜色、成熟度等信息,采摘直线模组用于带动采摘机构实现采收不同高度的果实,承接机构用于承接和暂存从运输管滚落的果品及控制果品是否滚出进入分级果箱,分级果箱用于存储不同等级的果品,行走机架用于固定采摘直线模组、分级直线模组和分级果箱,并在种植行间行走,驱控系统用于处理相机的感知信息以

苹果采摘机器人在线分级系统研究.docx
苹果采摘机器人在线分级系统研究苹果采摘机器人在线分级系统研究摘要:随着农业产业的现代化和社会的发展,农田的机械化已成为现代农业的重要组成部分。苹果采摘机器人的出现,极大地提高了苹果采摘的效率和质量。然而,在大规模生产和复杂的环境条件下,传统的苹果采摘机器人面临许多挑战,如准确判断成熟度和避免伤害果实等。因此,本论文旨在研究苹果采摘机器人在线分级系统,以实现精确的苹果采摘和分类。第一章:引言1.1研究背景1.2研究目的1.3研究意义第二章:苹果采摘机器人概述2.1机器人的定义和分类2.2苹果采摘机器人的发展

苹果采摘机器人在线分级系统研究的任务书.docx
苹果采摘机器人在线分级系统研究的任务书任务书题目:苹果采摘机器人在线分级系统研究任务背景:随着科技的不断发展,现代农业中越来越多的机器人开始发挥作用,提高了农业生产的效率和质量。其中,苹果采摘机器人是目前应用较广泛的一种机器人。苹果的品质关系到果农的收益和市场销售,所以如何对苹果进行在线分级是一个值得研究的问题。任务目标:本次研究的目标是针对苹果采摘机器人在线分级系统的设计与实现进行研究,开发一套稳定可靠的在线分级系统。该系统能够快速高效地识别苹果的品质,并通过机器视觉处理、自动控制等技术手段实现自动采摘

果品分级边缘检测方法.docx
果品分级边缘检测方法摘要本文介绍了一种新的果品分级检测方法,该方法基于边缘检测技术实现果品的形状检测和分类。我们采用了Canny边缘检测算法和基于形态学的滤波器来提取果品图像中的边缘信息,进而分类果品。实验结果表明,该方法具有较高的准确度和鲁棒性,可以满足果品加工生产的需要。关键词:边缘检测,滤波器,果品分类,Canny算法,形态学1.引言在果品加工生产中,果品的分类是非常重要的一个环节。传统的果品分类方式通常是由专业的人员根据外观大小、颜色等特征来区分方式,这种方式非常耗时耗力且存在误差。为了解决这个问
一种水果采摘分级装箱机器人.pdf
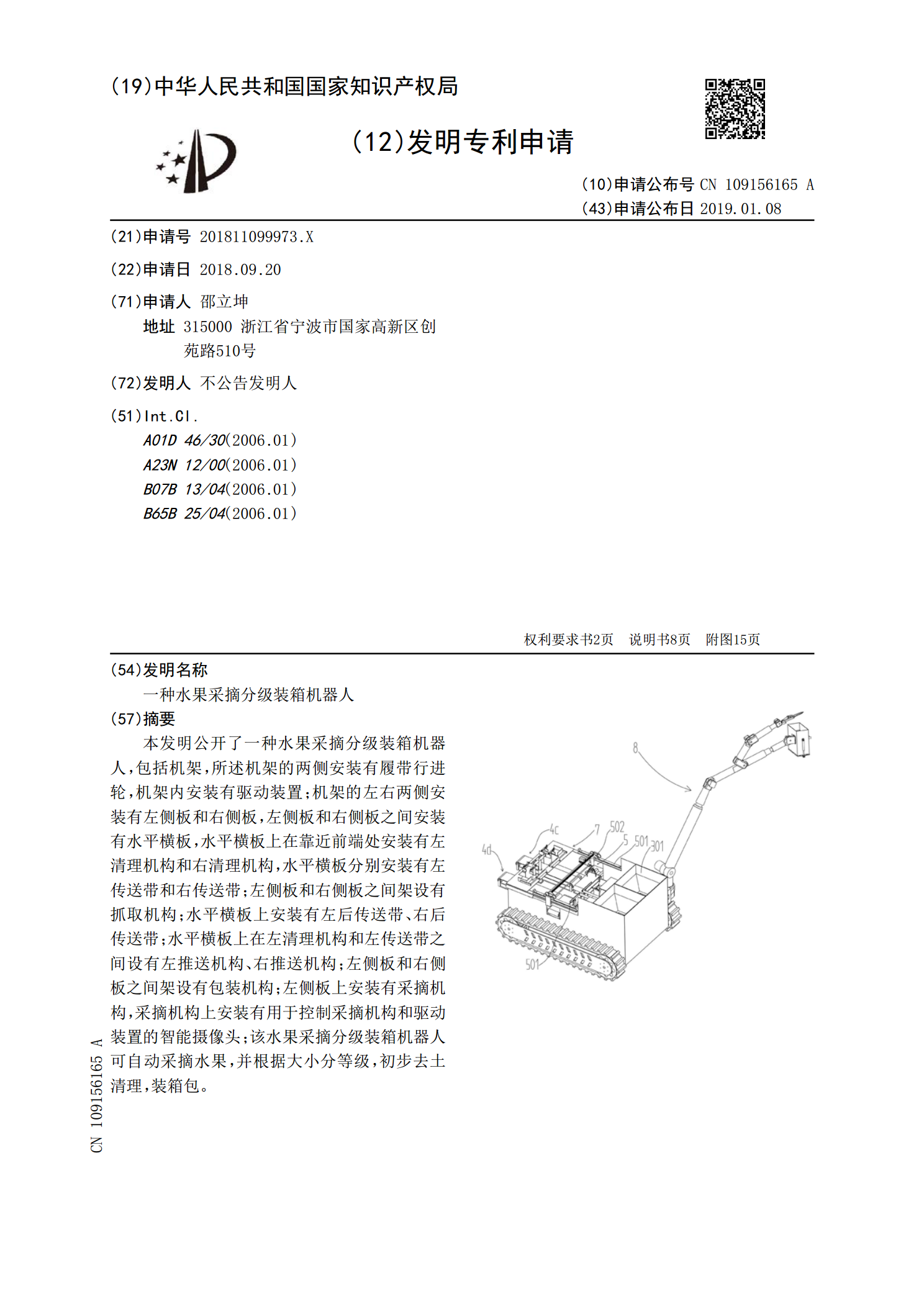
本发明公开了一种水果采摘分级装箱机器人,包括机架,所述机架的两侧安装有履带行进轮,机架内安装有驱动装置;机架的左右两侧安装有左侧板和右侧板,左侧板和右侧板之间安装有水平横板,水平横板上在靠近前端处安装有左清理机构和右清理机构,水平横板分别安装有左传送带和右传送带;左侧板和右侧板之间架设有抓取机构;水平横板上安装有左后传送带、右后传送带;水平横板上在左清理机构和左传送带之间设有左推送机构、右推送机构;左侧板和右侧板之间架设有包装机构;左侧板上安装有采摘机构,采摘机构上安装有用于控制采摘机构和驱动装置的智能摄