
植保喷药无人机及其定间距飞行控制方法.pdf

山柳****魔王


1/10
2/10
3/10

4/10

5/10
6/10
7/10

8/10

9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
植保喷药无人机及其定间距飞行控制方法.pdf
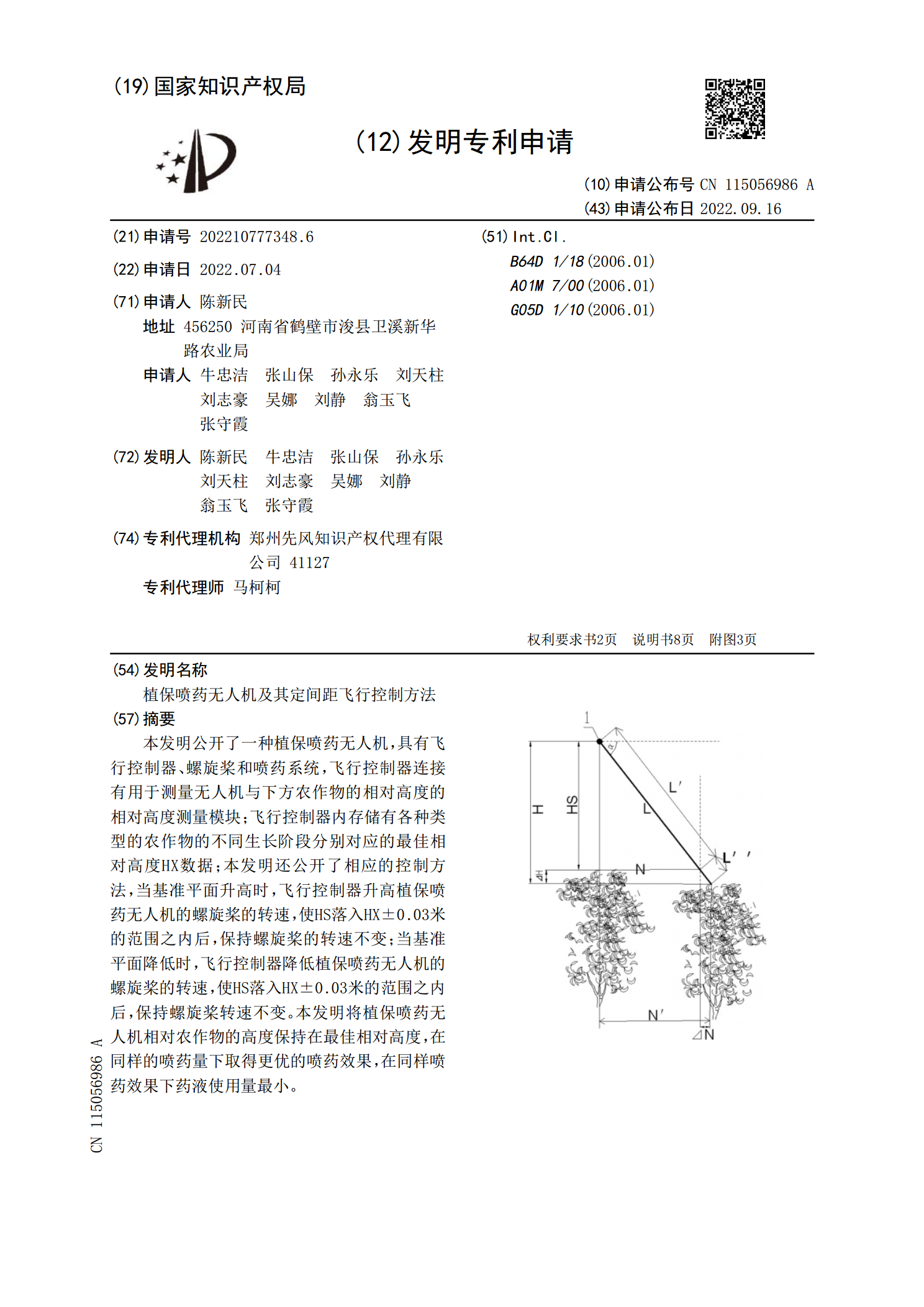
本发明公开了一种植保喷药无人机,具有飞行控制器、螺旋桨和喷药系统,飞行控制器连接有用于测量无人机与下方农作物的相对高度的相对高度测量模块;飞行控制器内存储有各种类型的农作物的不同生长阶段分别对应的最佳相对高度HX数据;本发明还公开了相应的控制方法,当基准平面升高时,飞行控制器升高植保喷药无人机的螺旋桨的转速,使HS落入HX±0.03米的范围之内后,保持螺旋桨的转速不变;当基准平面降低时,飞行控制器降低植保喷药无人机的螺旋桨的转速,使HS落入HX±0.03米的范围之内后,保持螺旋桨转速不变。本发明将植保喷药
具有高效喷药结构的植保无人机.pdf
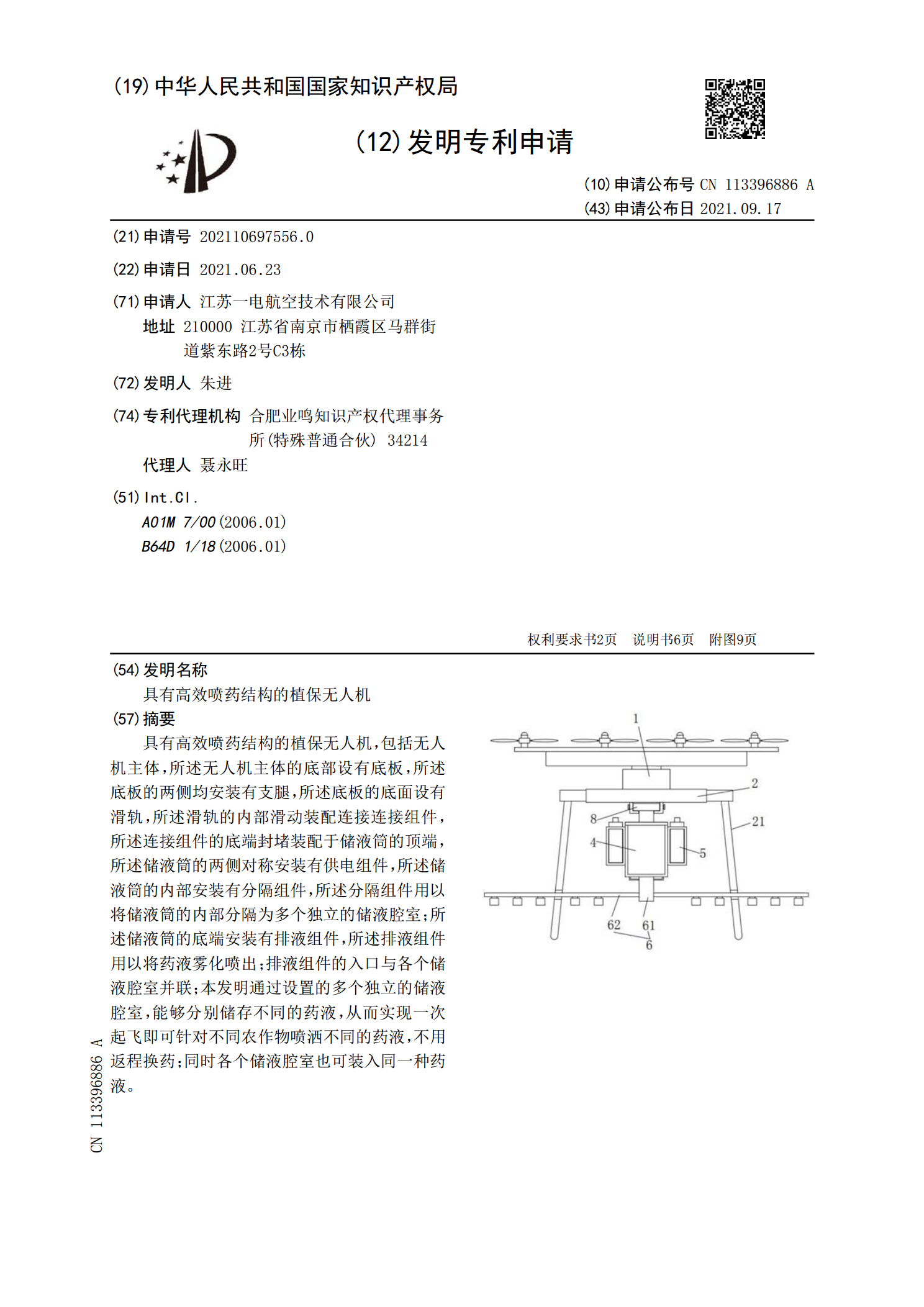
具有高效喷药结构的植保无人机,包括无人机主体,所述无人机主体的底部设有底板,所述底板的两侧均安装有支腿,所述底板的底面设有滑轨,所述滑轨的内部滑动装配连接连接组件,所述连接组件的底端封堵装配于储液筒的顶端,所述储液筒的两侧对称安装有供电组件,所述储液筒的内部安装有分隔组件,所述分隔组件用以将储液筒的内部分隔为多个独立的储液腔室;所述储液筒的底端安装有排液组件,所述排液组件用以将药液雾化喷出;排液组件的入口与各个储液腔室并联;本发明通过设置的多个独立的储液腔室,能够分别储存不同的药液,从而实现一次起飞即可针
一种基于UWB的农用植保无人机精准定位喷药控制方法.pdf
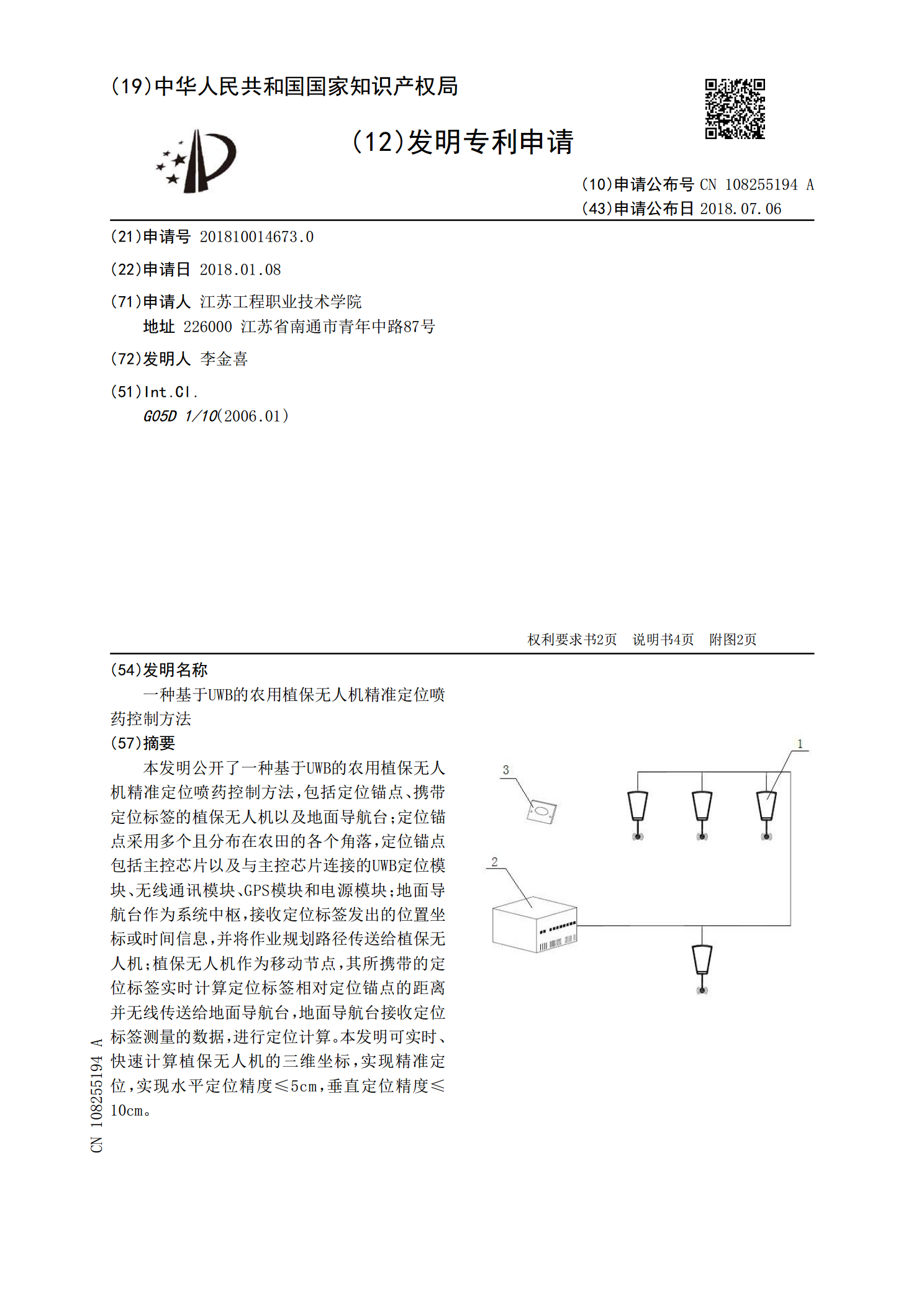
本发明公开了一种基于UWB的农用植保无人机精准定位喷药控制方法,包括定位锚点、携带定位标签的植保无人机以及地面导航台;定位锚点采用多个且分布在农田的各个角落,定位锚点包括主控芯片以及与主控芯片连接的UWB定位模块、无线通讯模块、GPS模块和电源模块;地面导航台作为系统中枢,接收定位标签发出的位置坐标或时间信息,并将作业规划路径传送给植保无人机;植保无人机作为移动节点,其所携带的定位标签实时计算定位标签相对定位锚点的距离并无线传送给地面导航台,地面导航台接收定位标签测量的数据,进行定位计算。本发明可实时、快

无人机植保技术 项目五 植保无人机安全飞行(任务一).pdf
项目五植保无人机安全飞行任务一安全操作规范5.1.1作业基本要求1.合理的气象条件应在5-35℃气温、3级以内风速条件下作业,避免在高温时段作业。2.良好的自身防护植保无人机飞防作业因为与作业区域完全隔离,所以操作手工作较为安全,但是必备的安全措施依然不可少。植保机操作手应穿戴遮阳帽、口罩、眼镜、防护服,地勤在此基础之上还应穿上丁腈材质手套,以避免手部沾染农药。另外,禁止穿短裤及拖鞋进行作业,避免因蚊虫、蛇叮咬而造成的损伤,在南方水田作业还应穿戴水鞋。穿戴规范的植保无人机操作手3.良好的身体条件(1)不得
一种喷药用的植保无人机停放平台.pdf
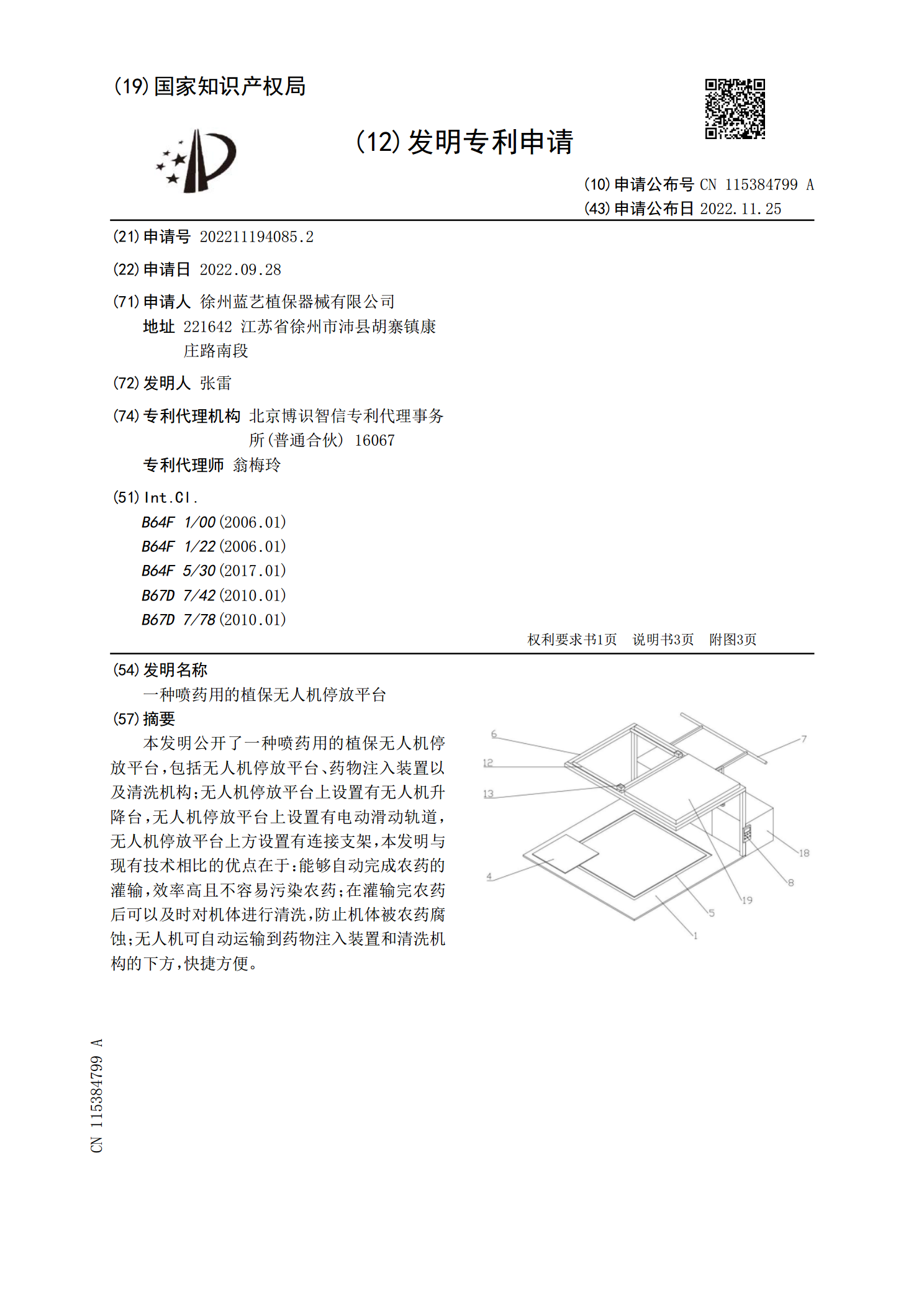
本发明公开了一种喷药用的植保无人机停放平台,包括无人机停放平台、药物注入装置以及清洗机构;无人机停放平台上设置有无人机升降台,无人机停放平台上设置有电动滑动轨道,无人机停放平台上方设置有连接支架,本发明与现有技术相比的优点在于:能够自动完成农药的灌输,效率高且不容易污染农药;在灌输完农药后可以及时对机体进行清洗,防止机体被农药腐蚀;无人机可自动运输到药物注入装置和清洗机构的下方,快捷方便。