
一种鱼类养殖自助上料方法及系统.pdf

秋花****姐姐

1/10

2/10

3/10
4/10

5/10
6/10

7/10

8/10
9/10
10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种鱼类养殖自助上料方法及系统.pdf
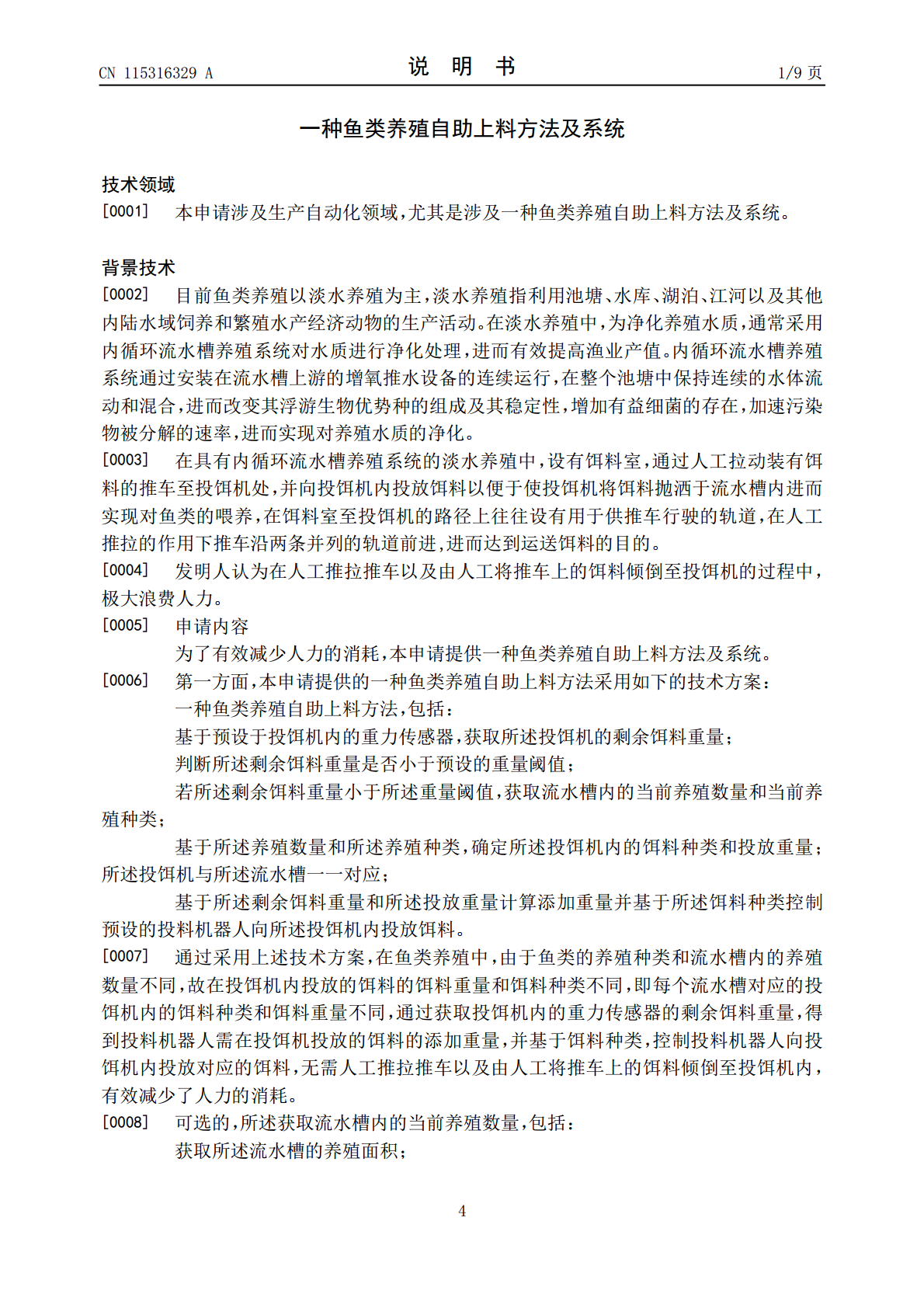
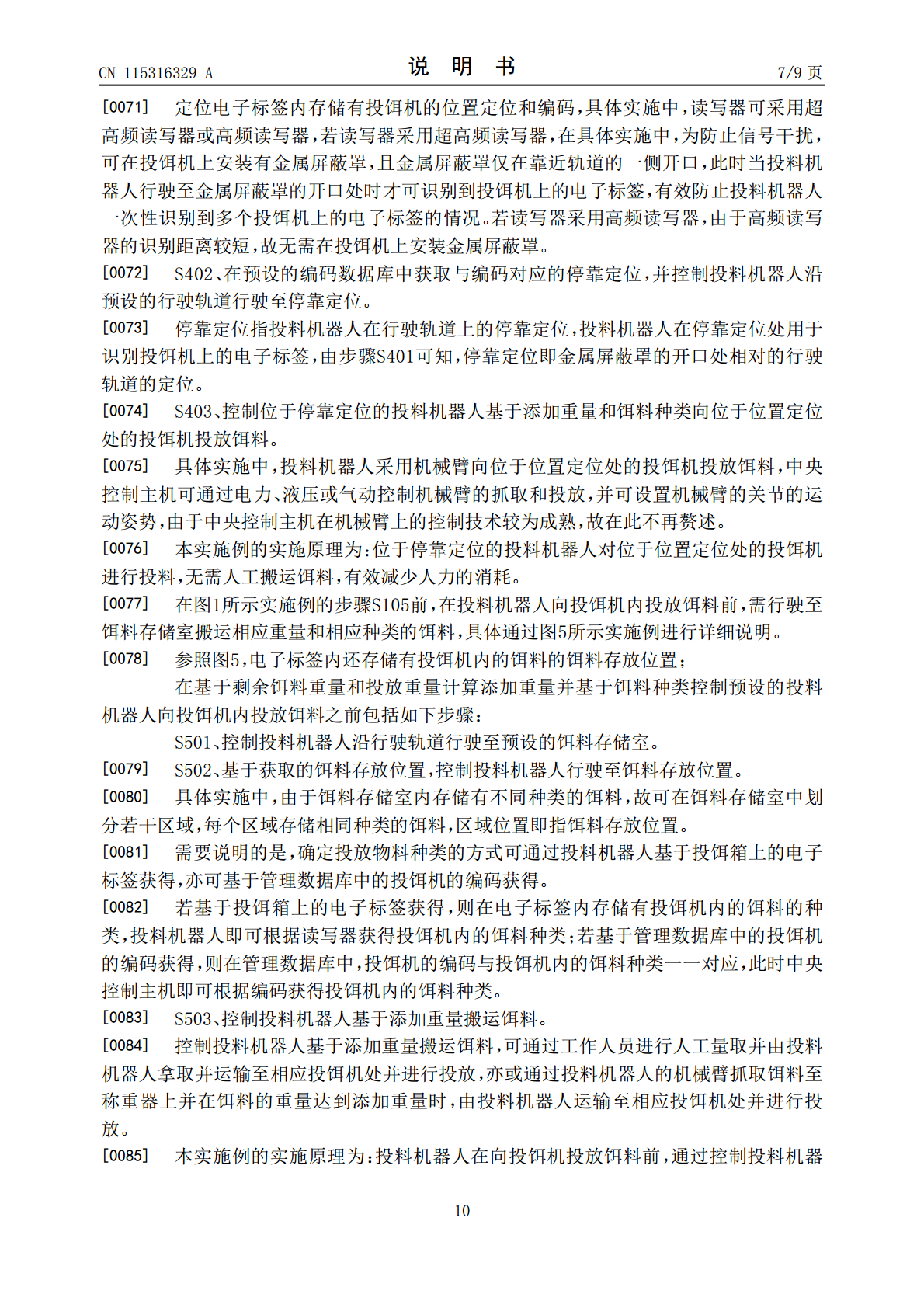
本申请涉及一种鱼类养殖自助上料方法及系统,属于生产自动化领域,其方法包括基于预设于投饵机内的重力传感器,获取所述投饵机的剩余饵料重量;判断所述剩余饵料重量是否小于预设的重量阈值;若所述剩余饵料重量小于所述重量阈值,获取流水槽内的当前养殖数量和当前养殖种类;基于所述养殖数量和所述养殖种类,确定所述投饵机内的饵料种类和投放重量;所述投饵机与所述流水槽一一对应;基于所述剩余饵料重量和所述投放重量计算添加重量并基于所述饵料种类控制预设的投料机器人向所述投饵机内投放饵料。本申请具有有效减少人力的消耗的效果。
一种鱼类单体养殖系统及其养殖方法.pdf
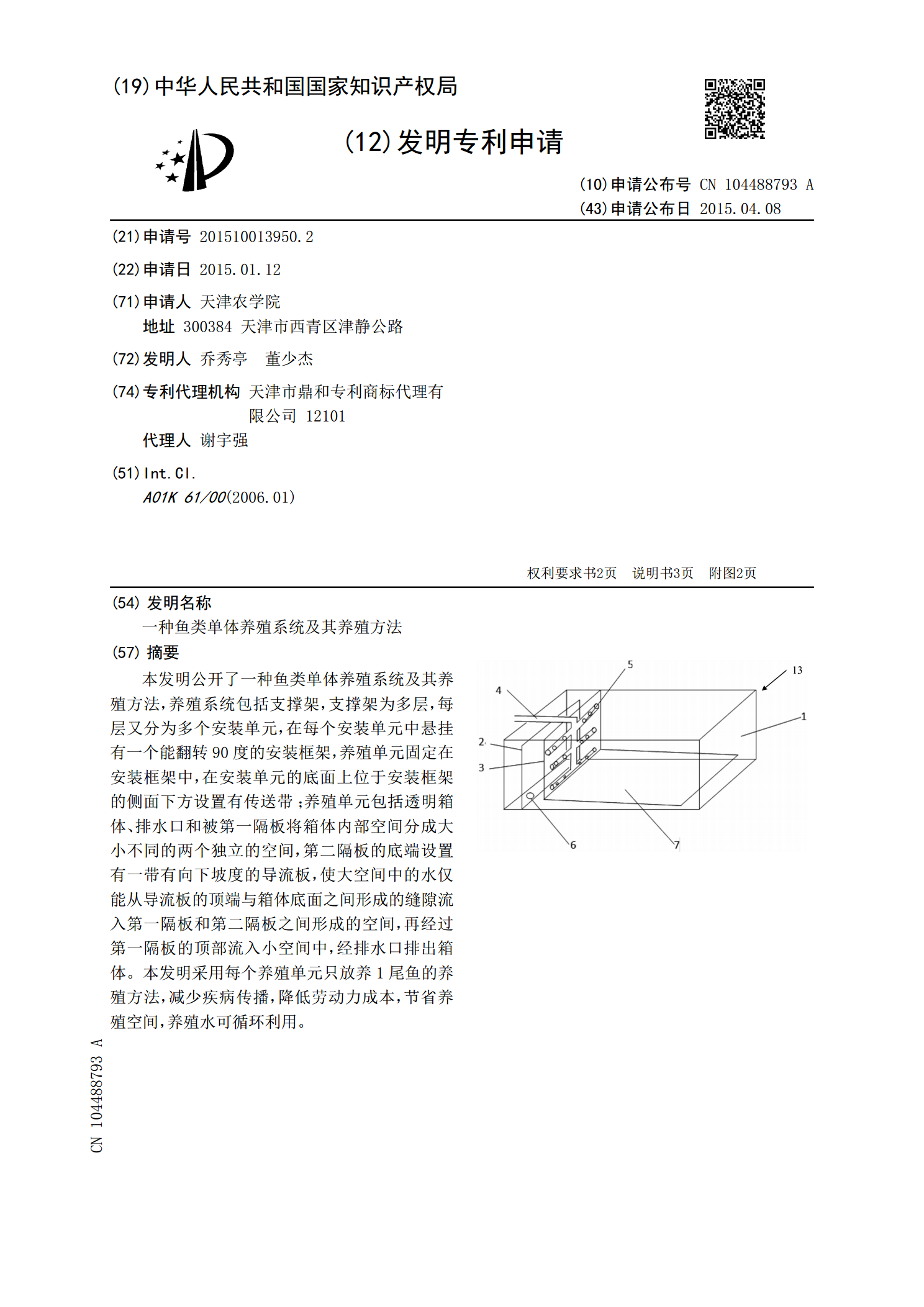
本发明公开了一种鱼类单体养殖系统及其养殖方法,养殖系统包括支撑架,支撑架为多层,每层又分为多个安装单元,在每个安装单元中悬挂有一个能翻转90度的安装框架,养殖单元固定在安装框架中,在安装单元的底面上位于安装框架的侧面下方设置有传送带;养殖单元包括透明箱体、排水口和被第一隔板将箱体内部空间分成大小不同的两个独立的空间,第二隔板的底端设置有一带有向下坡度的导流板,使大空间中的水仅能从导流板的顶端与箱体底面之间形成的缝隙流入第一隔板和第二隔板之间形成的空间,再经过第一隔板的顶部流入小空间中,经排水口排出箱体。本
一种上料系统及上料方法.pdf
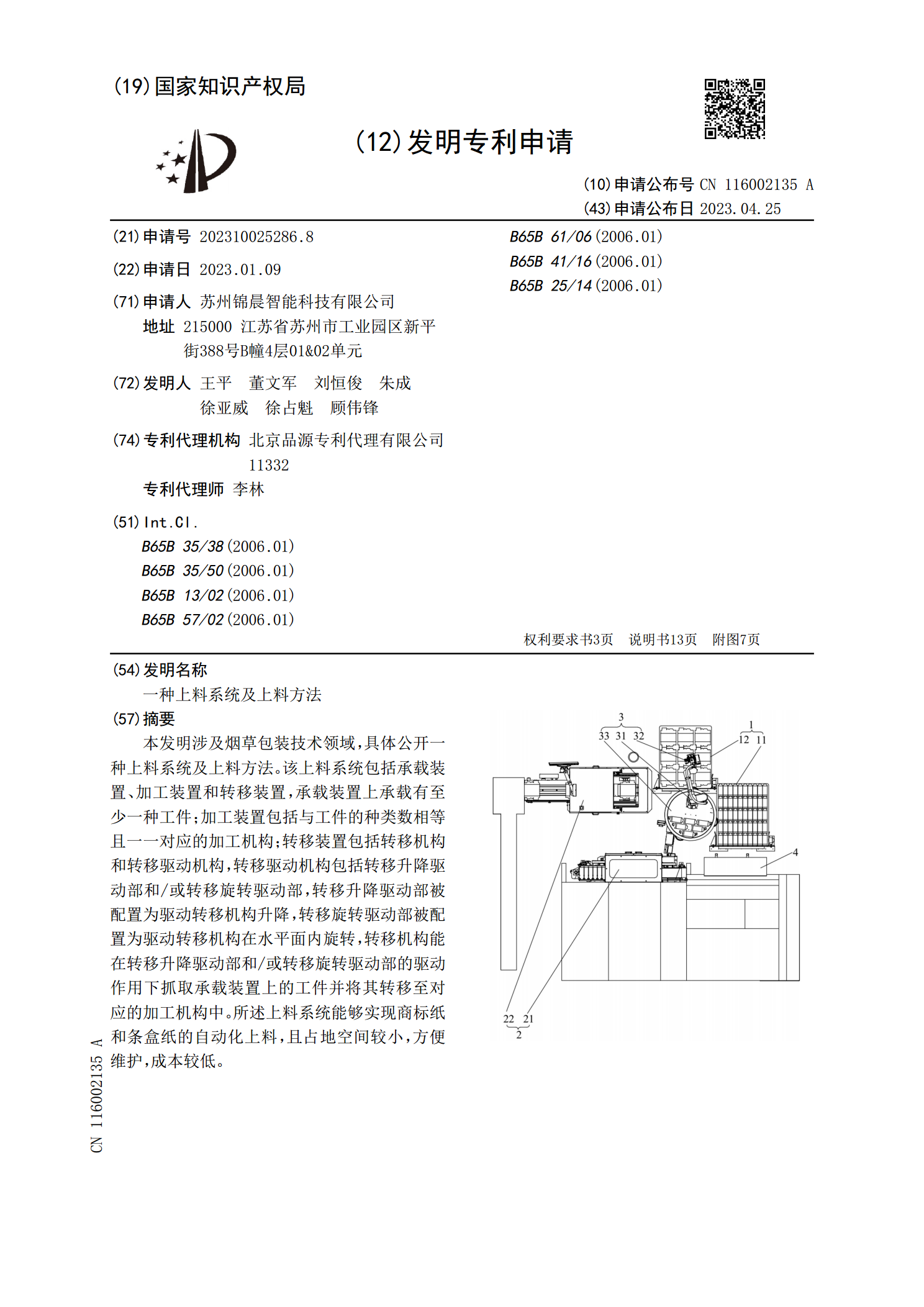
本发明涉及烟草包装技术领域,具体公开一种上料系统及上料方法。该上料系统包括承载装置、加工装置和转移装置,承载装置上承载有至少一种工件;加工装置包括与工件的种类数相等且一一对应的加工机构;转移装置包括转移机构和转移驱动机构,转移驱动机构包括转移升降驱动部和/或转移旋转驱动部,转移升降驱动部被配置为驱动转移机构升降,转移旋转驱动部被配置为驱动转移机构在水平面内旋转,转移机构能在转移升降驱动部和/或转移旋转驱动部的驱动作用下抓取承载装置上的工件并将其转移至对应的加工机构中。所述上料系统能够实现商标纸和条盒纸的自
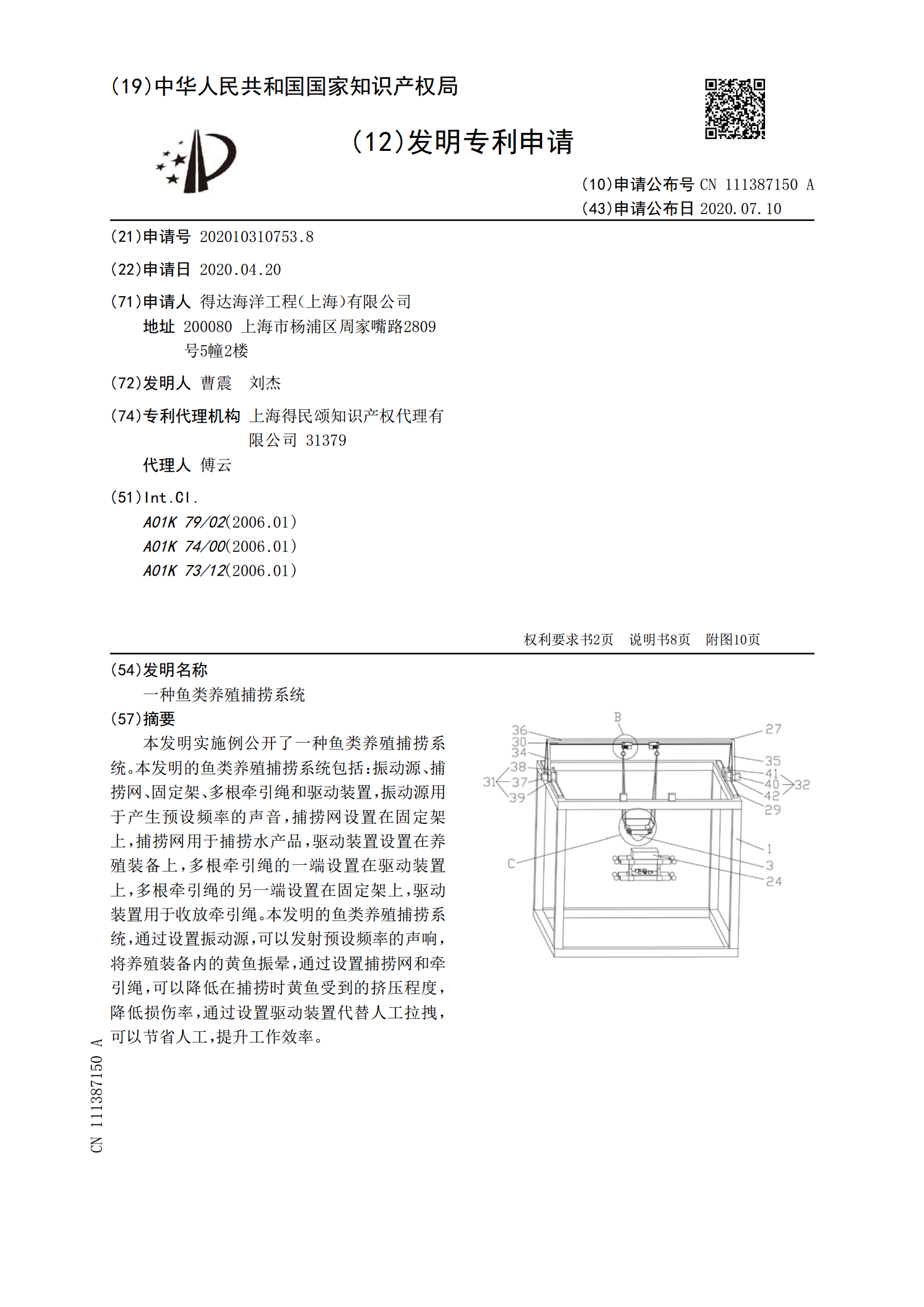
一种鱼类养殖捕捞系统.pdf
本发明实施例公开了一种鱼类养殖捕捞系统。本发明的鱼类养殖捕捞系统包括:振动源、捕捞网、固定架、多根牵引绳和驱动装置,振动源用于产生预设频率的声音,捕捞网设置在固定架上,捕捞网用于捕捞水产品,驱动装置设置在养殖装备上,多根牵引绳的一端设置在驱动装置上,多根牵引绳的另一端设置在固定架上,驱动装置用于收放牵引绳。本发明的鱼类养殖捕捞系统,通过设置振动源,可以发射预设频率的声响,将养殖装备内的黄鱼振晕,通过设置捕捞网和牵引绳,可以降低在捕捞时黄鱼受到的挤压程度,降低损伤率,通过设置驱动装置代替人工拉拽,可以节省人
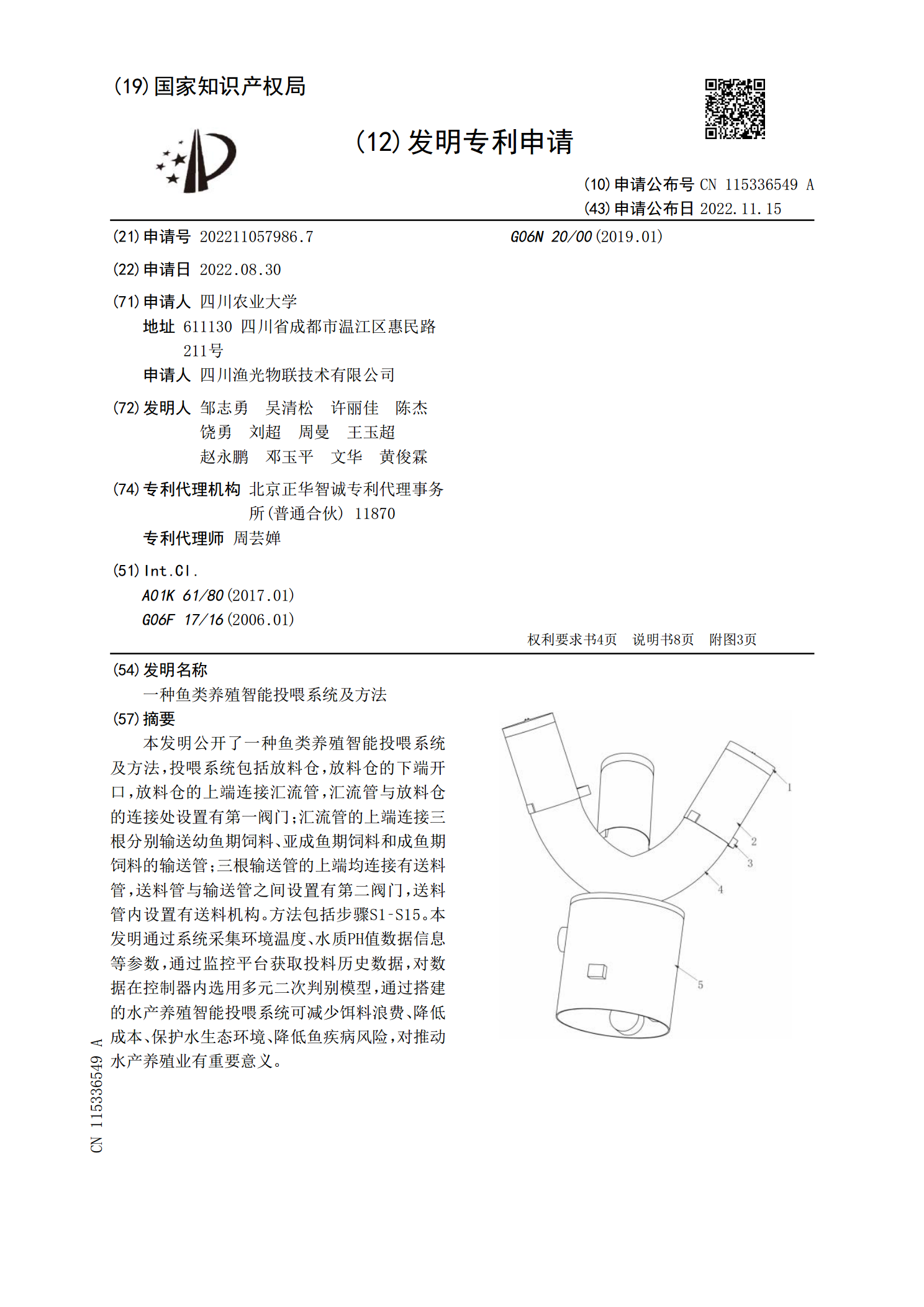
一种鱼类养殖智能投喂系统及方法.pdf
本发明公开了一种鱼类养殖智能投喂系统及方法,投喂系统包括放料仓,放料仓的下端开口,放料仓的上端连接汇流管,汇流管与放料仓的连接处设置有第一阀门;汇流管的上端连接三根分别输送幼鱼期饲料、亚成鱼期饲料和成鱼期饲料的输送管;三根输送管的上端均连接有送料管,送料管与输送管之间设置有第二阀门,送料管内设置有送料机构。方法包括步骤S1‑S15。本发明通过系统采集环境温度、水质PH值数据信息等参数,通过监控平台获取投料历史数据,对数据在控制器内选用多元二次判别模型,通过搭建的水产养殖智能投喂系统可减少饵料浪费、降低成本