
一种基于多模态数据融合的目标检测方法以及基于目标检测模型的在体果实采摘方法.pdf

书生****写意

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共22页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于多模态数据融合的目标检测方法以及基于目标检测模型的在体果实采摘方法.pdf
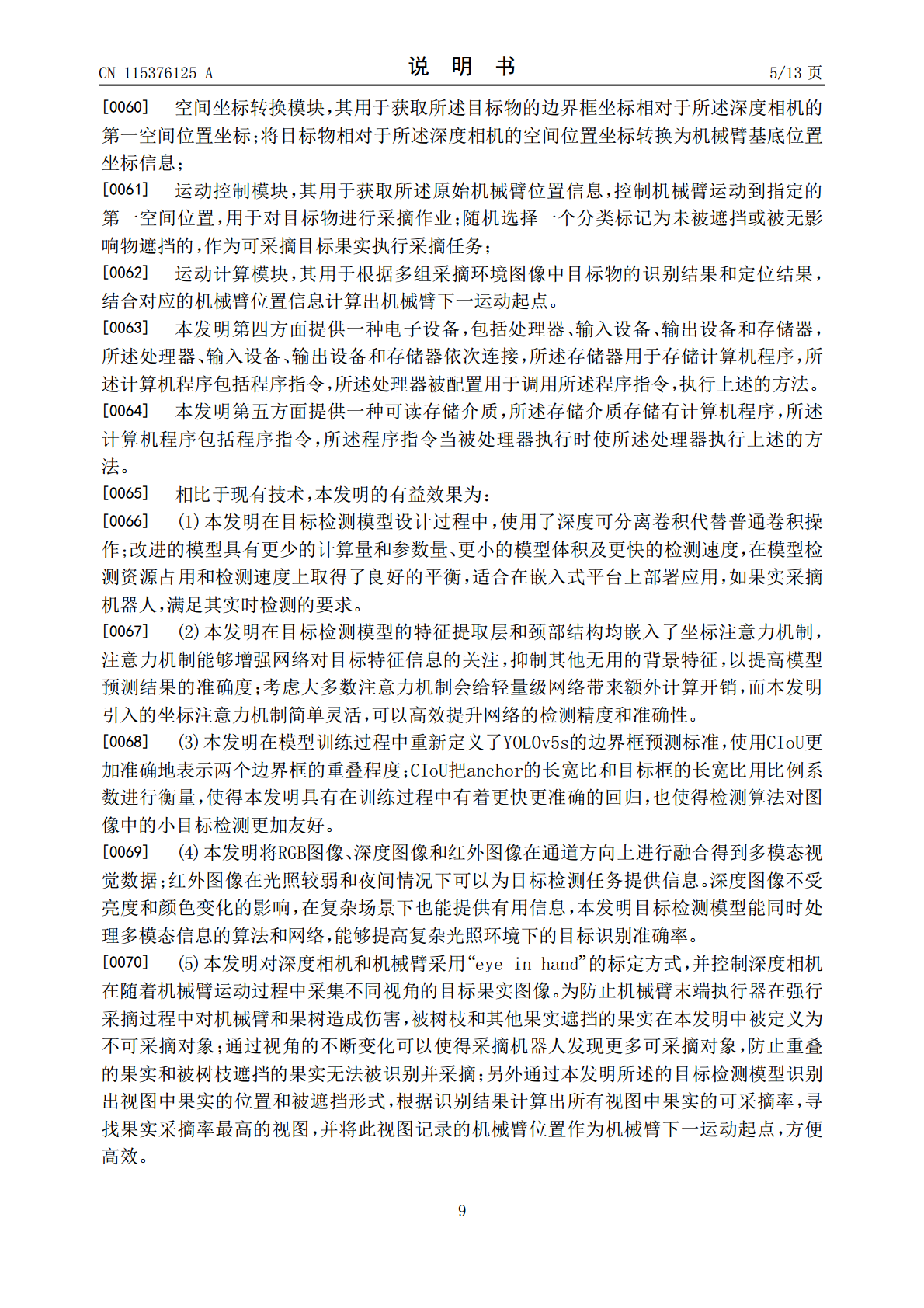
本发明公开了一种基于多模态数据融合的目标检测方法以及基于目标检测模型的在体果实采摘方法,属于智能检测技术领域。一方面目标检测模型的训练方法中,利用深度相机获取自然环境下在体果实的多模态视觉数据,引入坐标注意力机制增强特征提取网络对目标物的感知能力,结合深度可分离卷积模块减少模型参数量和推理时间;另一方面将目标检测模型应用到机械臂对果实的识别中,提出基于果实位置信息和遮挡状态分类的视觉伺服检测机制,该机制利用机械臂在果实采摘过程中具有运动特性的优势,通过机械臂运动带动相机视角变化,不断更新相机视野内所检测到

一种基于图像融合的多模态图像目标检测方法.pdf
本发明涉及一种基于图像融合的多模态图像目标检测方法,包括:1)将预先采集好的红外图像及其可见光图像,制作多模态图像数据集;2)将预处理好的成对图像作为融合模型中生成模型G的输入;生成模型G基于U‑Net等全卷积网络,以残差网络为基础的卷积神经网络作为生成网络模型结构,包括收缩过程和扩张过程,收缩路径包括多个卷积加ReLU激活层再加最大池化(MaxPooling)结构,下采样的每一步特征通道数都增加一倍,输出生成的融合图像;融合图像输入融合模型中的判别网络模型;根据训练过程中损失函数的变化,按迭代次数调节
一种基于Transformer的跨模态融合目标检测方法.pdf
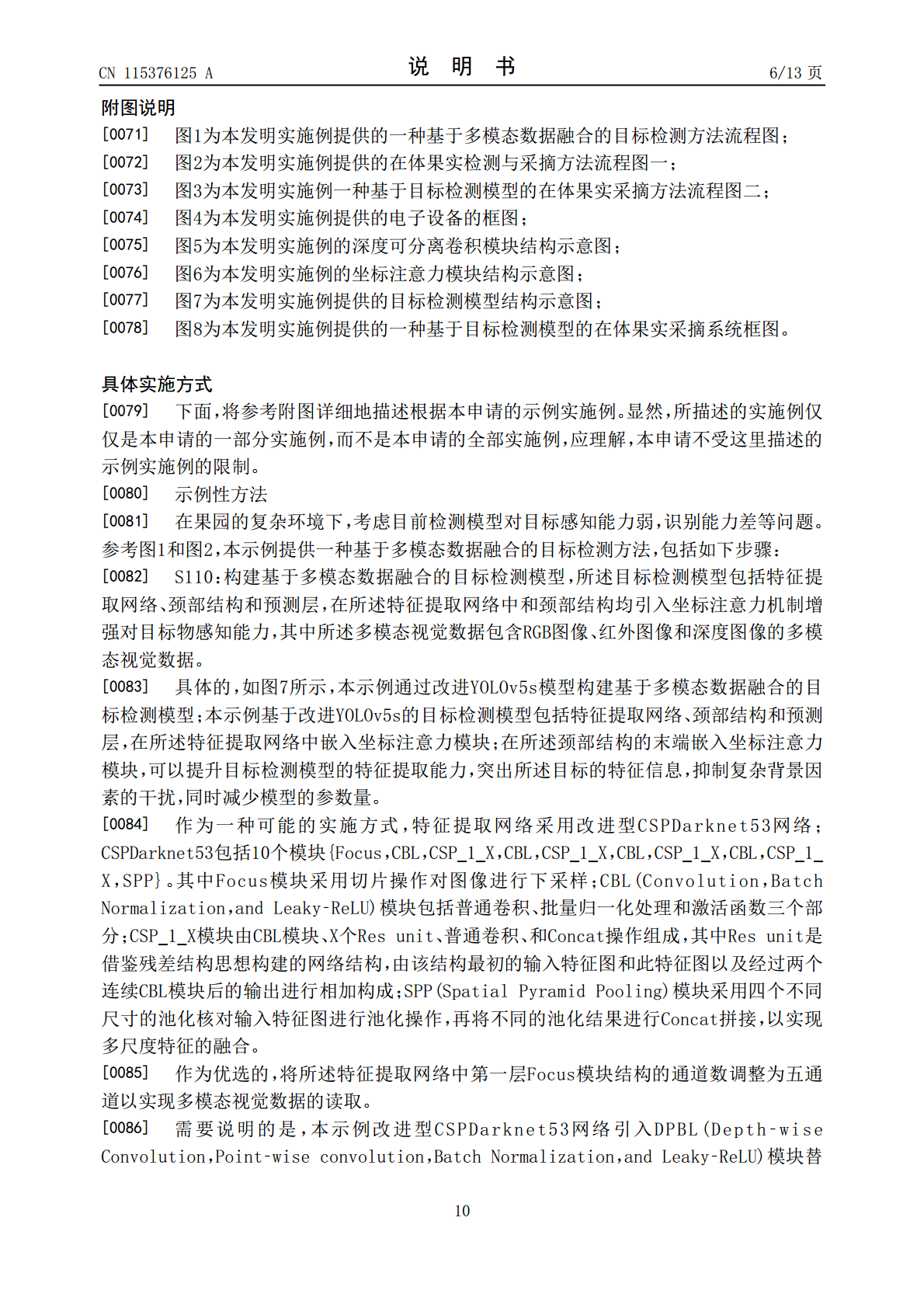
本发明涉及一种基于Transformer的跨模态融合目标检测方法,属于图像处理技术领域。本发明利用雷达传感器收集雷达数据同时摄像头收集图像数据。将毫米波雷达信息与图像信息进行对齐操作,包括时间对齐和空间坐标转换,同时将雷达特征映射到图像平面上。依据雷达物理特性对雷达信息进行预处理。构建特征提取网络,分别提取雷达特征和图像特征。设计雷达与视觉特征交互融合模块,充分考虑跨模态信息交互和上下文环境信息的补充学习。本发明与现有技术相比,将周围环境信息结合跨模态信息进行联合学习。解决了传统方法仅仅只能获取相同位置信
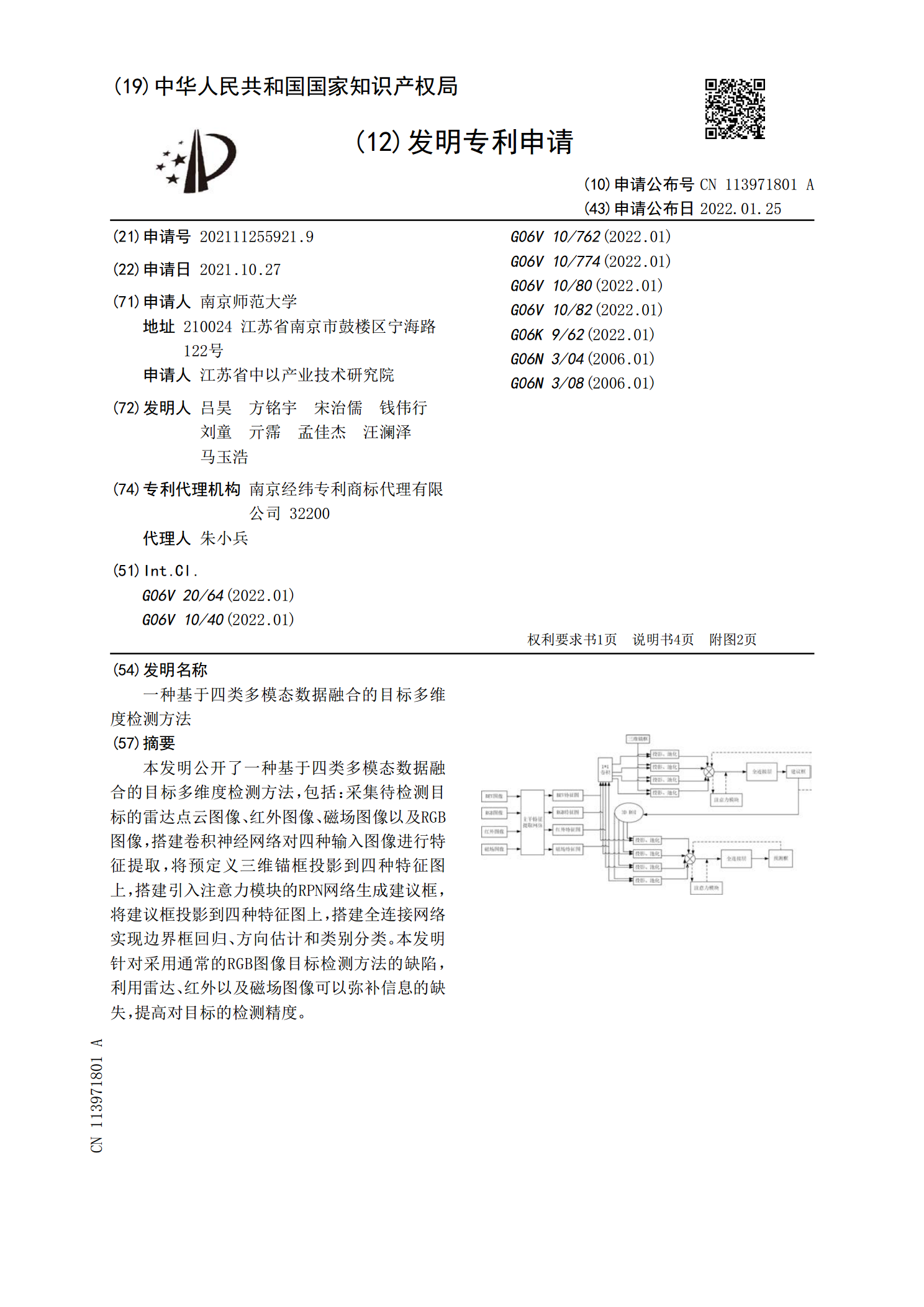
一种基于四类多模态数据融合的目标多维度检测方法.pdf
本发明公开了一种基于四类多模态数据融合的目标多维度检测方法,包括:采集待检测目标的雷达点云图像、红外图像、磁场图像以及RGB图像,搭建卷积神经网络对四种输入图像进行特征提取,将预定义三维锚框投影到四种特征图上,搭建引入注意力模块的RPN网络生成建议框,将建议框投影到四种特征图上,搭建全连接网络实现边界框回归、方向估计和类别分类。本发明针对采用通常的RGB图像目标检测方法的缺陷,利用雷达、红外以及磁场图像可以弥补信息的缺失,提高对目标的检测精度。
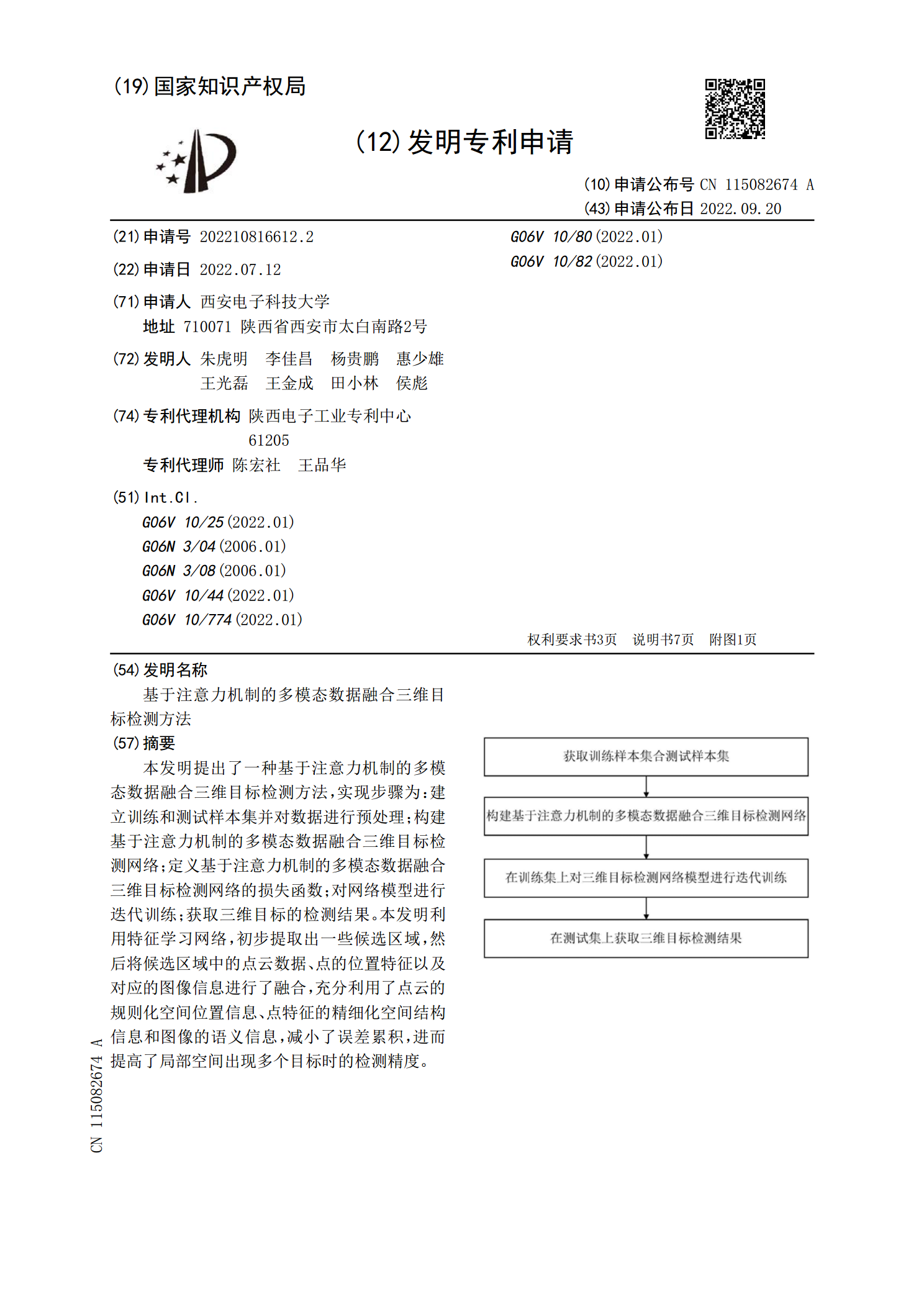
基于注意力机制的多模态数据融合三维目标检测方法.pdf
本发明提出了一种基于注意力机制的多模态数据融合三维目标检测方法,实现步骤为:建立训练和测试样本集并对数据进行预处理;构建基于注意力机制的多模态数据融合三维目标检测网络;定义基于注意力机制的多模态数据融合三维目标检测网络的损失函数;对网络模型进行迭代训练;获取三维目标的检测结果。本发明利用特征学习网络,初步提取出一些候选区域,然后将候选区域中的点云数据、点的位置特征以及对应的图像信息进行了融合,充分利用了点云的规则化空间位置信息、点特征的精细化空间结构信息和图像的语义信息,减小了误差累积,进而提高了局部空间