
一种图像质量确定方法、装置、设备及存储介质.pdf

一只****懿呀


1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10

9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种图像质量确定方法、装置、设备及存储介质.pdf
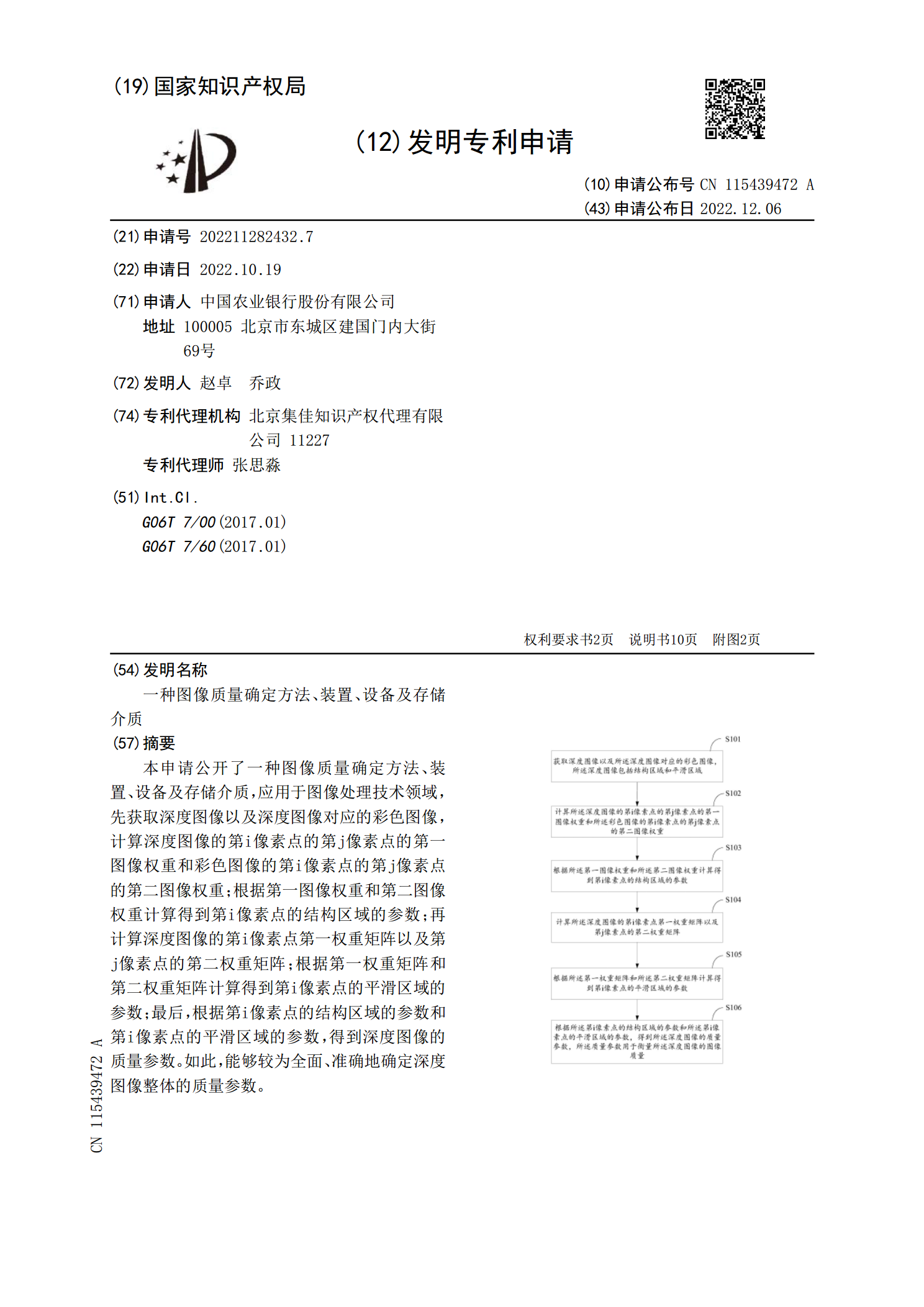
本申请公开了一种图像质量确定方法、装置、设备及存储介质,应用于图像处理技术领域,先获取深度图像以及深度图像对应的彩色图像,计算深度图像的第i像素点的第j像素点的第一图像权重和彩色图像的第i像素点的第j像素点的第二图像权重;根据第一图像权重和第二图像权重计算得到第i像素点的结构区域的参数;再计算深度图像的第i像素点第一权重矩阵以及第j像素点的第二权重矩阵;根据第一权重矩阵和第二权重矩阵计算得到第i像素点的平滑区域的参数;最后,根据第i像素点的结构区域的参数和第i像素点的平滑区域的参数,得到深度图像的质量参数
确定图像的方法、装置、设备及存储介质.pdf
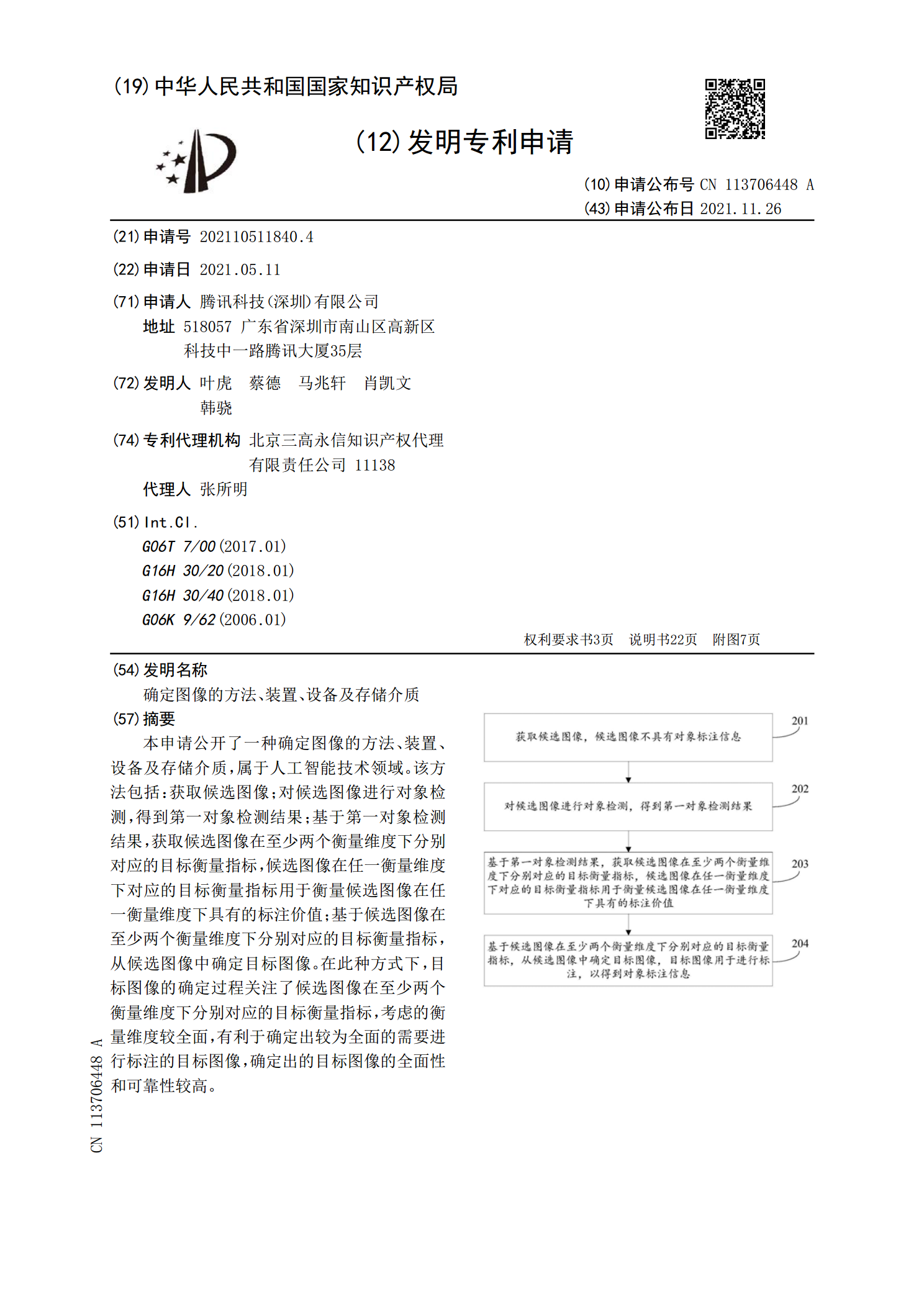
本申请公开了一种确定图像的方法、装置、设备及存储介质,属于人工智能技术领域。该方法包括:获取候选图像;对候选图像进行对象检测,得到第一对象检测结果;基于第一对象检测结果,获取候选图像在至少两个衡量维度下分别对应的目标衡量指标,候选图像在任一衡量维度下对应的目标衡量指标用于衡量候选图像在任一衡量维度下具有的标注价值;基于候选图像在至少两个衡量维度下分别对应的目标衡量指标,从候选图像中确定目标图像。在此种方式下,目标图像的确定过程关注了候选图像在至少两个衡量维度下分别对应的目标衡量指标,考虑的衡量维度较全面,
一种图像梯度确定方法、装置、设备及存储介质.pdf
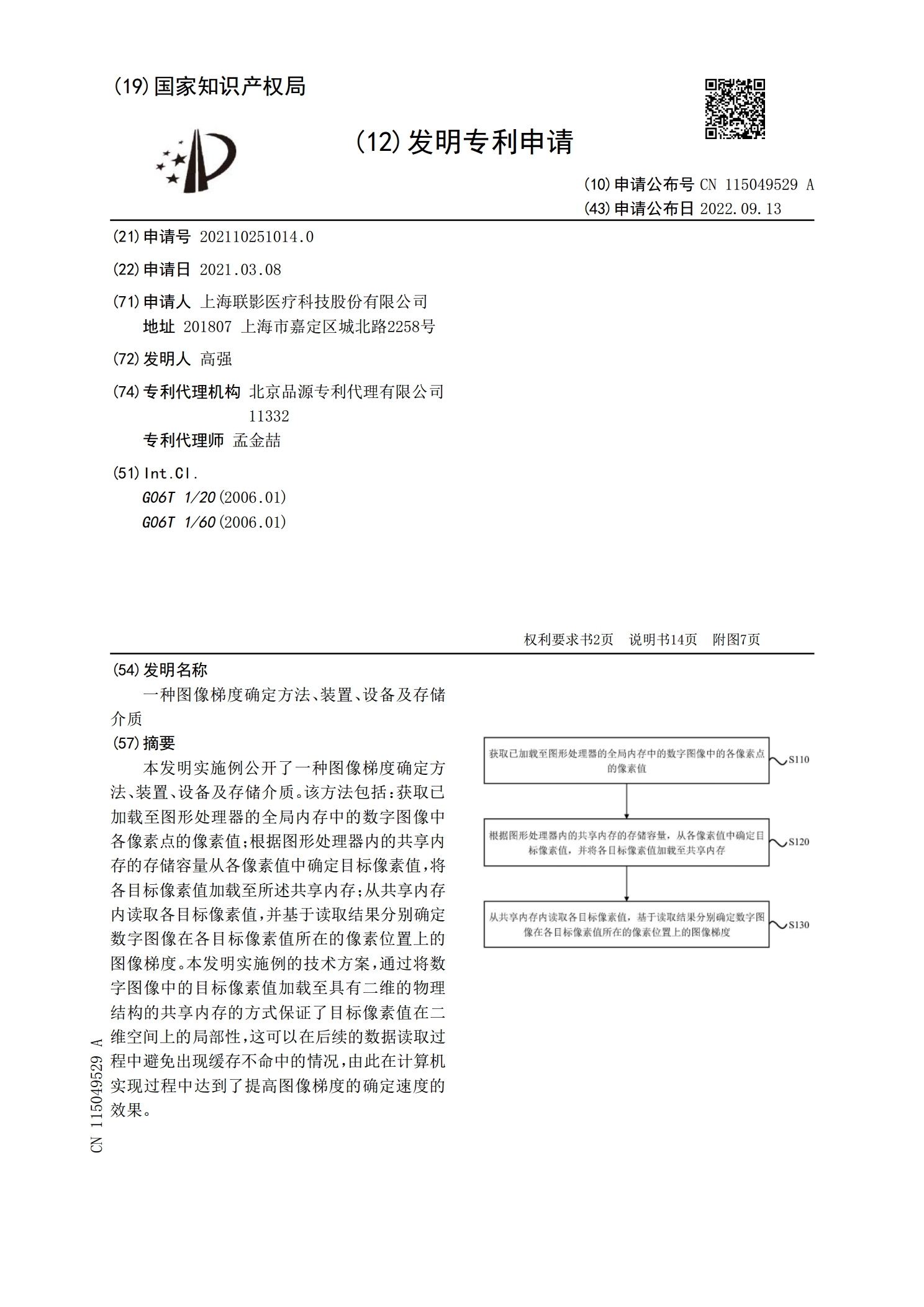
本发明实施例公开了一种图像梯度确定方法、装置、设备及存储介质。该方法包括:获取已加载至图形处理器的全局内存中的数字图像中各像素点的像素值;根据图形处理器内的共享内存的存储容量从各像素值中确定目标像素值,将各目标像素值加载至所述共享内存;从共享内存内读取各目标像素值,并基于读取结果分别确定数字图像在各目标像素值所在的像素位置上的图像梯度。本发明实施例的技术方案,通过将数字图像中的目标像素值加载至具有二维的物理结构的共享内存的方式保证了目标像素值在二维空间上的局部性,这可以在后续的数据读取过程中避免出现缓存不
一种图像相似度确定方法及装置、设备、存储介质.pdf
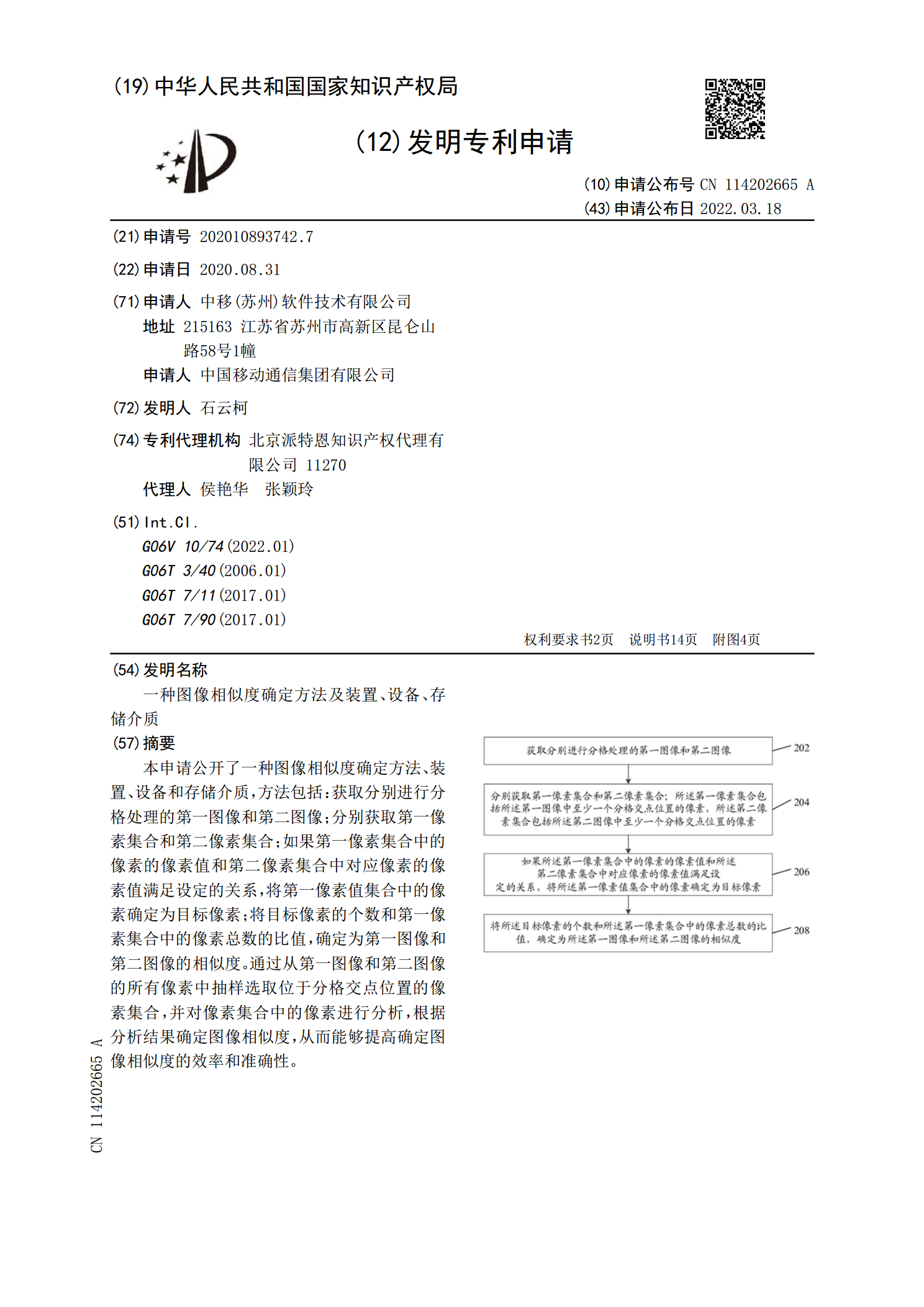
本申请公开了一种图像相似度确定方法、装置、设备和存储介质,方法包括:获取分别进行分格处理的第一图像和第二图像;分别获取第一像素集合和第二像素集合;如果第一像素集合中的像素的像素值和第二像素集合中对应像素的像素值满足设定的关系,将第一像素值集合中的像素确定为目标像素;将目标像素的个数和第一像素集合中的像素总数的比值,确定为第一图像和第二图像的相似度。通过从第一图像和第二图像的所有像素中抽样选取位于分格交点位置的像素集合,并对像素集合中的像素进行分析,根据分析结果确定图像相似度,从而能够提高确定图像相似度的效
确定样本图像的方法、装置、设备及存储介质.pdf
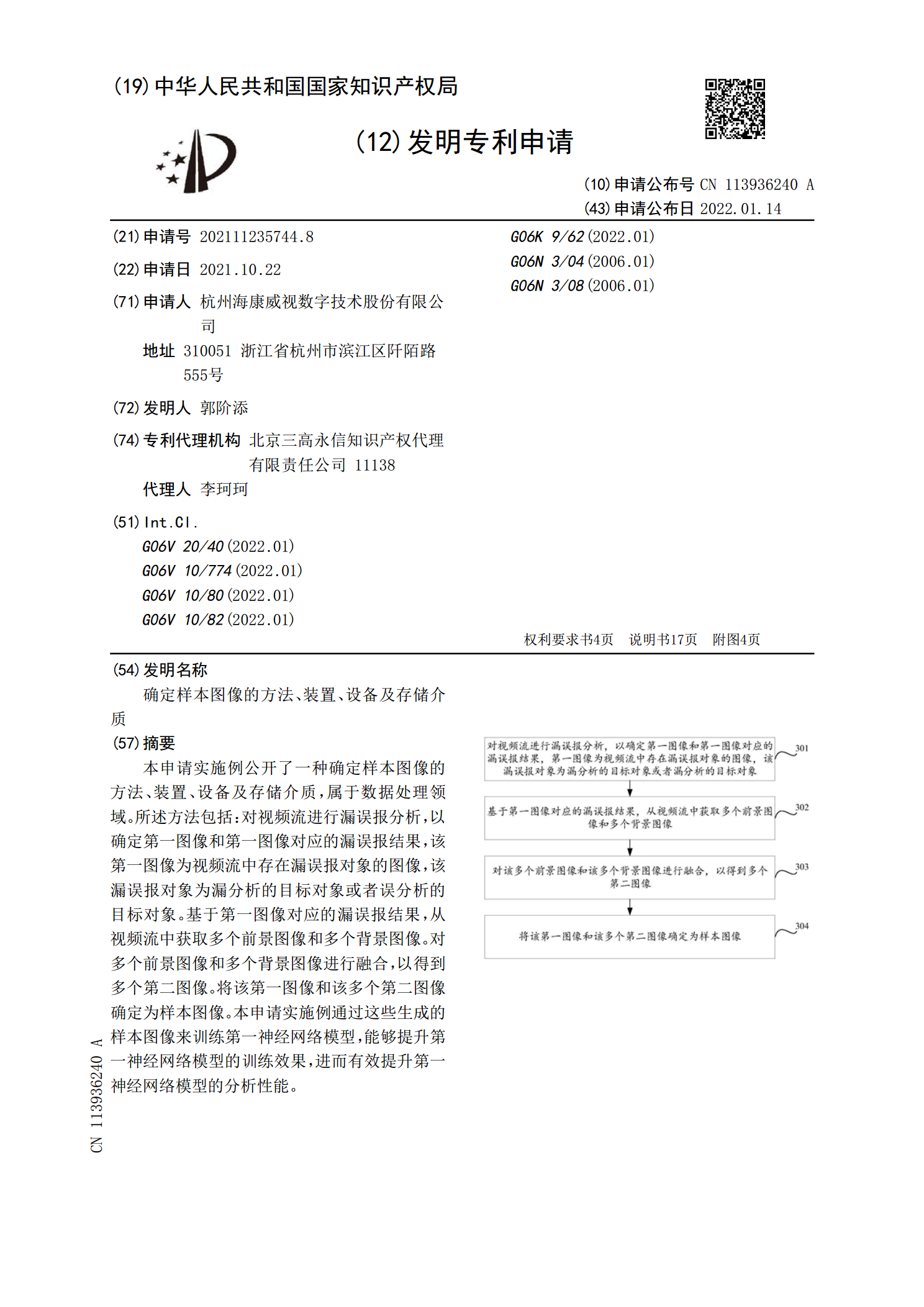
本申请实施例公开了一种确定样本图像的方法、装置、设备及存储介质,属于数据处理领域。所述方法包括:对视频流进行漏误报分析,以确定第一图像和第一图像对应的漏误报结果,该第一图像为视频流中存在漏误报对象的图像,该漏误报对象为漏分析的目标对象或者误分析的目标对象。基于第一图像对应的漏误报结果,从视频流中获取多个前景图像和多个背景图像。对多个前景图像和多个背景图像进行融合,以得到多个第二图像。将该第一图像和该多个第二图像确定为样本图像。本申请实施例通过这些生成的样本图像来训练第一神经网络模型,能够提升第一神经网络模