
一种基于多传感器融合的农业无人车定位里程计方法及系统.pdf

是你****晨呀

1/10
2/10
3/10
4/10
5/10

6/10
7/10
8/10
9/10
10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于多传感器融合的农业无人车定位里程计方法及系统.pdf
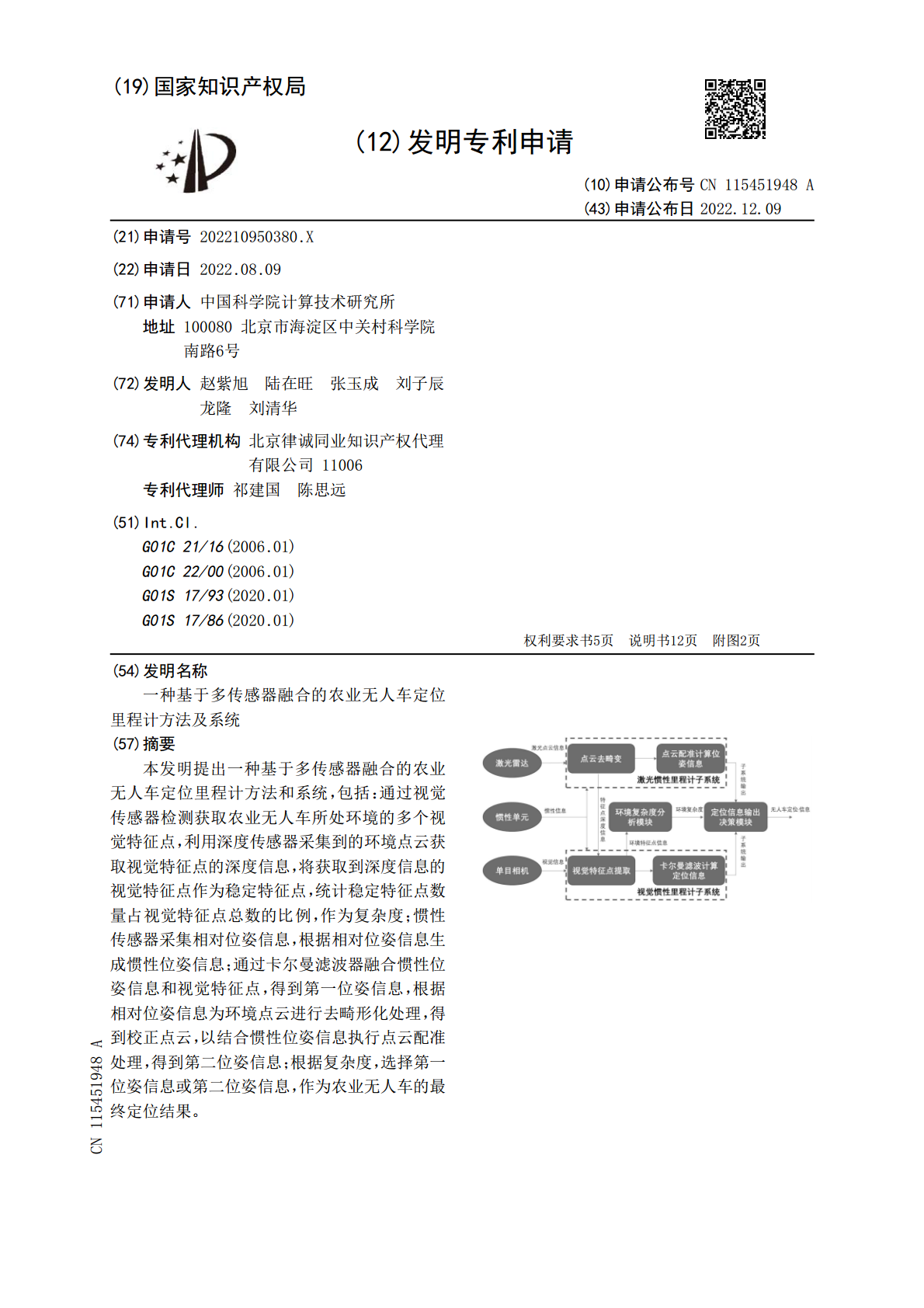
本发明提出一种基于多传感器融合的农业无人车定位里程计方法和系统,包括:通过视觉传感器检测获取农业无人车所处环境的多个视觉特征点,利用深度传感器采集到的环境点云获取视觉特征点的深度信息,将获取到深度信息的视觉特征点作为稳定特征点,统计稳定特征点数量占视觉特征点总数的比例,作为复杂度;惯性传感器采集相对位姿信息,根据相对位姿信息生成惯性位姿信息;通过卡尔曼滤波器融合惯性位姿信息和视觉特征点,得到第一位姿信息,根据相对位姿信息为环境点云进行去畸形化处理,得到校正点云,以结合惯性位姿信息执行点云配准处理,得到第二

一种融合多源传感器信息的无人车定位方法.pdf
本发明涉及一种融合多源传感器信息的无人车定位方法,该方法包括以下步骤:步骤1:获取待控制车辆的GPS位置信息和IMU信息,并将待控制车辆结合惯性导航系统与GPS信号获得的厘米级精度定位作为真值;步骤2:建立线性模型;步骤3:获取线性模型下的融合多源传感器信息的无人车定位算法,并得到线性模型下的融合定位结果;步骤4:建立非线性模型;步骤5:获取运动学模型下的融合多源传感器信息的无人车定位算法,并得到非线性模型下的融合定位结果;步骤6:建立单车模型;步骤7:获取单车模型下的融合多源传感器信息的无人车定位算法,
一种融合多源传感器信息的无人车定位方法.pdf
本发明涉及一种融合多源传感器信息的无人车定位方法,该方法包括以下步骤:步骤1:获取待控制车辆的GPS位置信息和IMU信息,并将待控制车辆结合惯性导航系统与GPS信号获得的厘米级精度定位作为真值;步骤2:建立线性模型;步骤3:获取线性模型下的融合多源传感器信息的无人车定位算法,并得到线性模型下的融合定位结果;步骤4:建立非线性模型;步骤5:获取运动学模型下的融合多源传感器信息的无人车定位算法,并得到非线性模型下的融合定位结果;步骤6:建立单车模型;步骤7:获取单车模型下的融合多源传感器信息的无人车定位算法,

一种基于多传感器数据融合的定位系统及定位方法.pdf
本发明公开了一种基于多传感器数据融合的定位系统及定位方法,通过在码盘架上固定编码器和全向轮,全向轮的主转动轴与编码器转轴连接,固定支架上固定有三个码盘架,三个码盘架上的三个编码器转轴轴线所在竖直平面之间的夹角均为120°,三个全向轮同时接触运动地面;采用三码盘全场定位系统,当移动机器人运动时,三个全向轮被动旋转,能够准确获取机器人运动全方位移动数据,从而减小因陀螺仪的角度漂移而导致定位不准的影响,通过三个码盘坐标的更新公式获取待定位机器人在三个自由度的变化情况,实现相对定位,提高了机器人在高速行驶以及不同
轮式里程计与陀螺仪信息融合的无人车定向定位方法.pdf
一种轮式里程计与陀螺仪信息融合的无人车定向定位方法,属于车辆控制技术领域。本发明的目的是根据轮式里程计与陀螺仪不同的噪声特性,设计用于轮式里程计与陀螺仪信息融合的轮式里程计与陀螺仪信息融合的无人车定向定位方法。本发明分为:传感器安装方式;运动学模型建立;传感器误差与噪声分析;传感器方差在线估计与里程计异常值检测情况下的用于轮式里程计与陀螺仪信息融合的改进卡尔曼滤波方法。本发明通过对传感器噪声分析,设计传感器噪声特性在线实时估计方法,可自适应的估计不同环境下的里程计与陀螺仪的噪声特性,提高了轮式里程计与陀螺