
基于北斗导航农机运动与排种速度匹配控制系统.pdf

猫巷****熙柔

1/10
2/10
3/10
4/10
5/10
6/10
7/10

8/10

9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
基于北斗导航农机运动与排种速度匹配控制系统.pdf
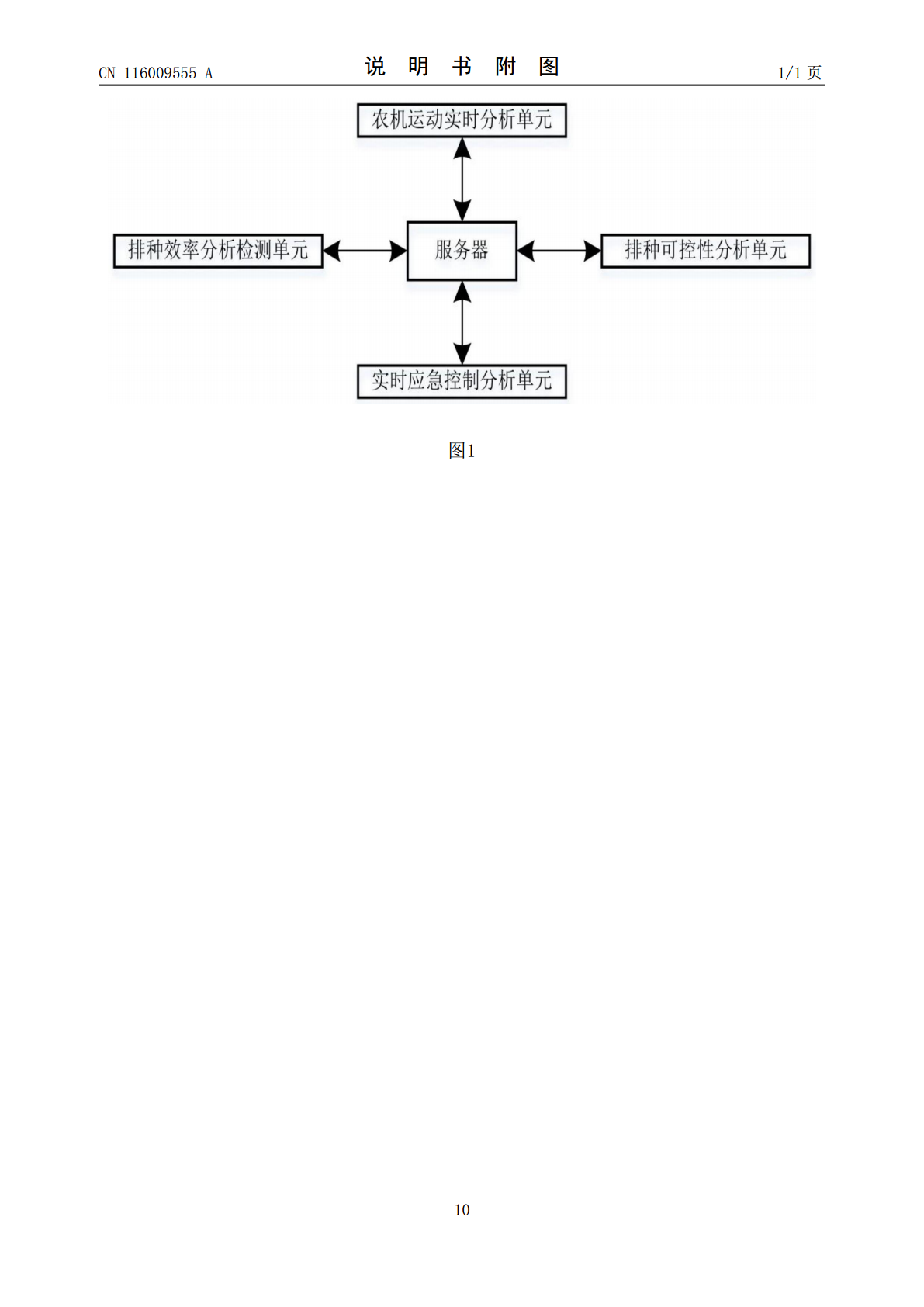
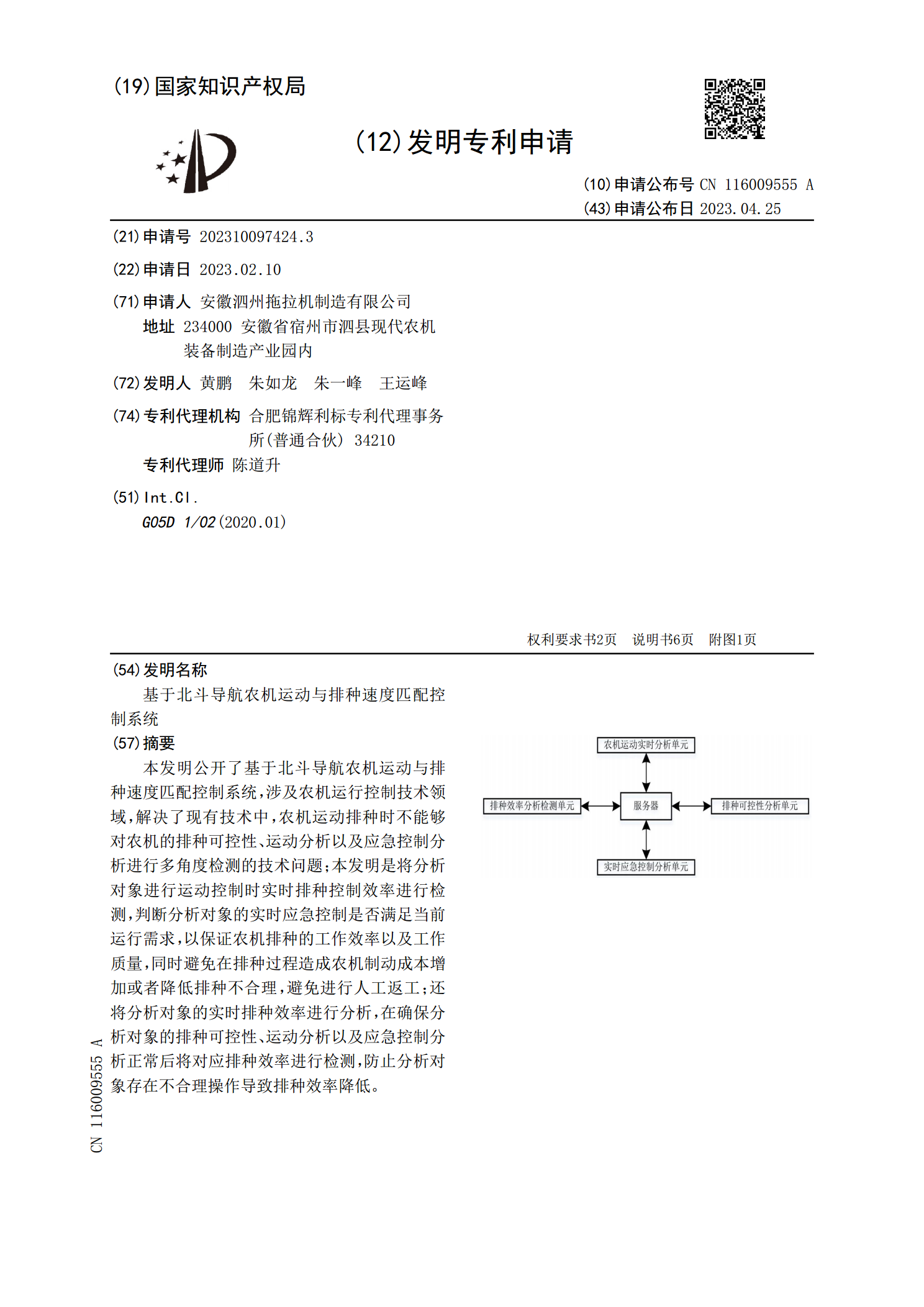
本发明公开了基于北斗导航农机运动与排种速度匹配控制系统,涉及农机运行控制技术领域,解决了现有技术中,农机运动排种时不能够对农机的排种可控性、运动分析以及应急控制分析进行多角度检测的技术问题;本发明是将分析对象进行运动控制时实时排种控制效率进行检测,判断分析对象的实时应急控制是否满足当前运行需求,以保证农机排种的工作效率以及工作质量,同时避免在排种过程造成农机制动成本增加或者降低排种不合理,避免进行人工返工;还将分析对象的实时排种效率进行分析,在确保分析对象的排种可控性、运动分析以及应急控制分析正常后将对应
基于北斗导航的农机精准定位作业控制系统.pdf
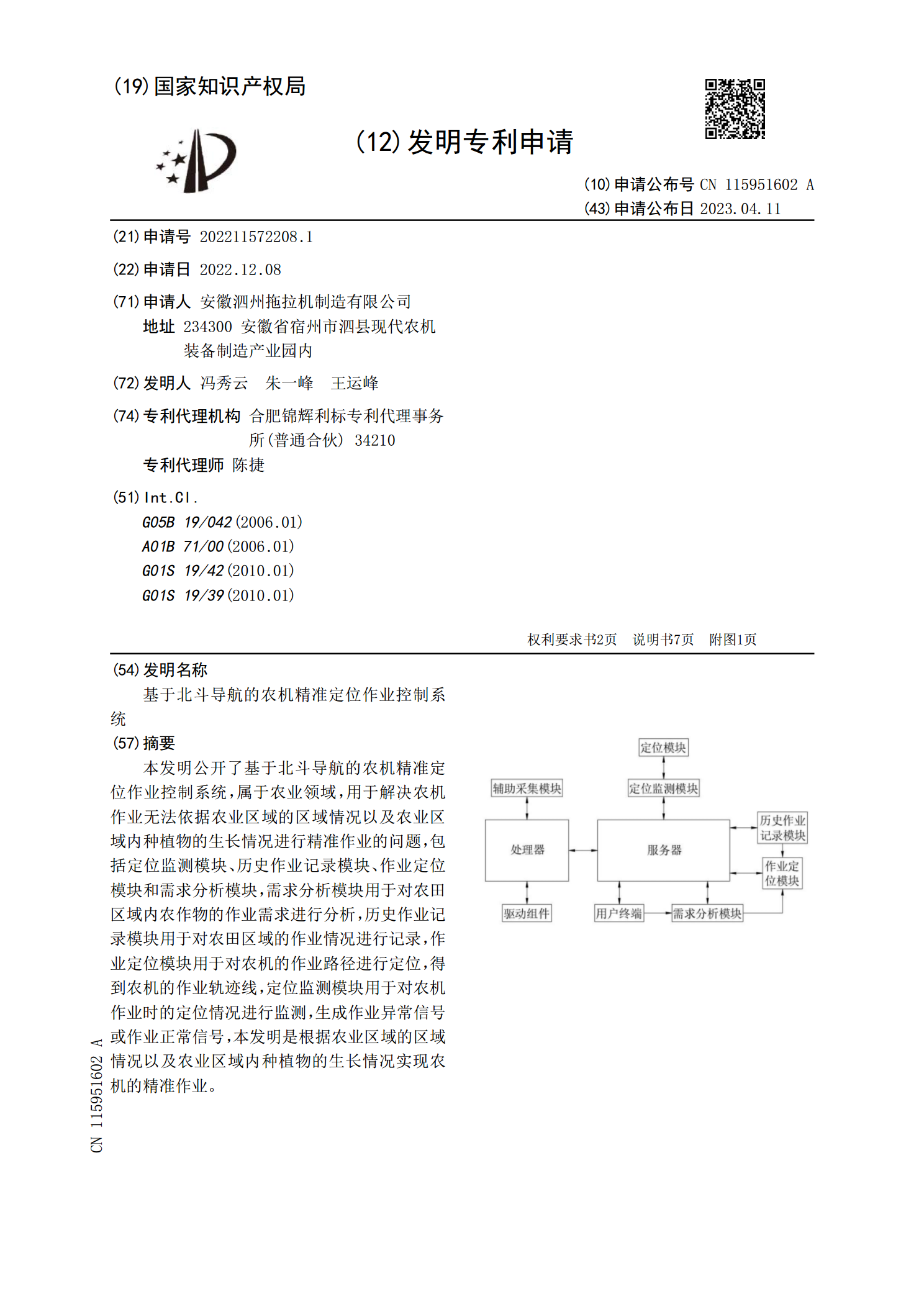
本发明公开了基于北斗导航的农机精准定位作业控制系统,属于农业领域,用于解决农机作业无法依据农业区域的区域情况以及农业区域内种植物的生长情况进行精准作业的问题,包括定位监测模块、历史作业记录模块、作业定位模块和需求分析模块,需求分析模块用于对农田区域内农作物的作业需求进行分析,历史作业记录模块用于对农田区域的作业情况进行记录,作业定位模块用于对农机的作业路径进行定位,得到农机的作业轨迹线,定位监测模块用于对农机作业时的定位情况进行监测,生成作业异常信号或作业正常信号,本发明是根据农业区域的区域情况以及农业区
一种北斗导航农机作业控制方法及系统.pdf
本发明公开了一种北斗导航农机作业控制方法及系统,其中,一种北斗导航农机作业控制方法包括,通过无人机获取田地全景图像,并通过图像处理模块对田地全景图像进行预处理;基于预处理获得的图像,通过线路规划模块对农机作业进行线路规划,生成最短路径;通过北斗模块获取农机位置,将最短路径和农机位置输入至控制模块,控制农机作业;本发明通过设计图像处理模块对无人机采集的全景图像进行处理,为线路规划提供准确依据,同时通过加入农机工作效率和时钟,有效地提高了农机的工作效率。

一种基于北斗卫星导航定位设备.pdf
本发明公开了一种基于北斗卫星导航定位设备,包括壳体,所述壳体底部插装有支撑脚,所述壳体表面中心处设有导航定位装置,所述壳体表面且位于导航定位装置一侧设有闹钟表盘,所述壳体表面上且位于音乐播放装置一侧设有温度计装置,所述壳体表面下方设有USB插口,所述壳体背部设有储能蓄电池装置,所述壳体表面上且位于闹钟表盘下方设有指南针,所述储能蓄电池装置分别与导航定位装置和闹钟表盘电性连接。本发明的有益效果是,结构简单,实用性强。
一种基于北斗导航的语音智能终端.pdf
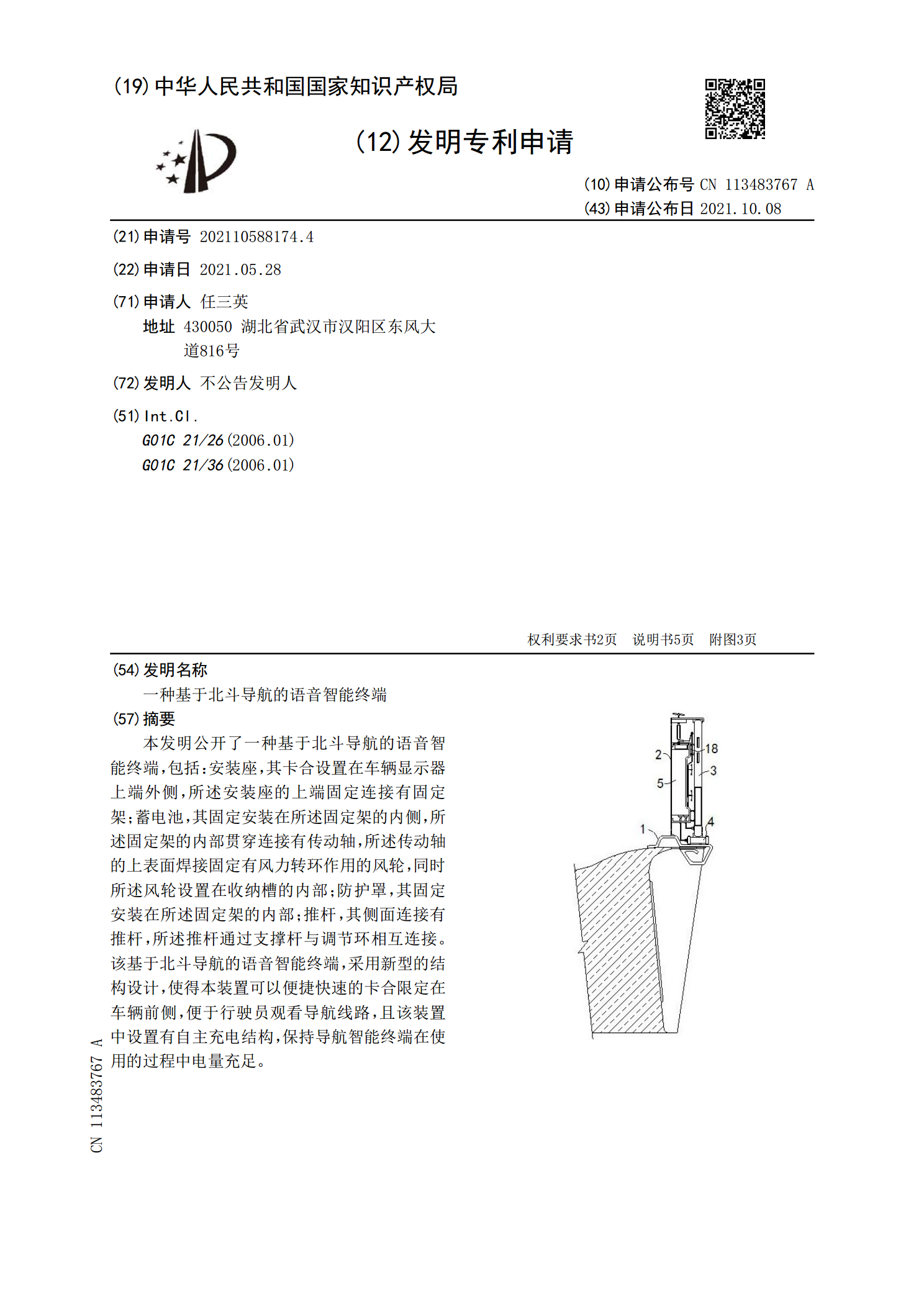
本发明公开了一种基于北斗导航的语音智能终端,包括:安装座,其卡合设置在车辆显示器上端外侧,所述安装座的上端固定连接有固定架;蓄电池,其固定安装在所述固定架的内侧,所述固定架的内部贯穿连接有传动轴,所述传动轴的上表面焊接固定有风力转环作用的风轮,同时所述风轮设置在收纳槽的内部;防护罩,其固定安装在所述固定架的内部;推杆,其侧面连接有推杆,所述推杆通过支撑杆与调节环相互连接。该基于北斗导航的语音智能终端,采用新型的结构设计,使得本装置可以便捷快速的卡合限定在车辆前侧,便于行驶员观看导航线路,且该装置中设置有自