
田间作物表型监测机器人自走平台与监测方法.pdf

志玉****爱啊


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

田间作物表型监测机器人自走平台与监测方法.pdf
一种田间作物表型监测机器人自走平台与监测方法,包括车架,载物平台,控制系统、信息采集系统和定位导航模块,沿前进方向,在车架前方左右两侧和后方左右两侧分别对称连接一个轮距调节装置,每个轮距调节装置与一个高度调节装置的顶端连接,每个高度调节装置的底端连接一个行走系统,且行走系统仅与高度调节装置连接;本发明车体下部空间用于通过农作物,机器人通过RTK和IMU组合定位导航,可在田间按规划好的路径行驶,并搭载多种光谱类传感器,实现作物表型信息的采集,同时,通过建立作物生长识别模型,判别监测区域内的作物生长状态,进而

自走式田间作物表型信息获取平台设计的开题报告.docx
自走式田间作物表型信息获取平台设计的开题报告一、选题的背景现代农业已进入数字化和智能化时代,其中自走式田间作物表型信息获取平台的开发和应用已成为种植业的热点和前沿领域。传统的农业种植方式主要依赖人力和手工测量方法,无法满足大面积农田的高效、精准、实时的作物生长监测要求,对于精细化农业管理、高产优质作物的培育和产业化经营等方面存在诸多不足。因此,自走式田间作物表型信息获取平台的设计和研发,对于提高农业生产效率和质量,创新农业种植管理方式及服务模式,具有重要意义和广阔应用前景。二、选题的意义和目的1.意义(1

一种田间作物表型垂直信息监测方法.pdf
本发明涉及一种田间作物表型垂直信息监测方法,监测方法基于田间作物表型垂直信息监测系统,该系统包括:暗箱平台,用于搭载传感器及相关设备,构造稳定的暗室监测环境;冠层分层机构,设置于暗箱平台上,用于定量分割冠层层次,并粉碎成均匀样品;落料机构,用于承接切割粉碎的样品;样品输送机构,设置于暗箱平台内,用于传送冠层分层机构粉碎的样品到不同的工位;监测机构,设置于暗箱平台内,用于监测样品的表型数据;控制机构,设置于暗箱平台内,用于控制整个监测系统及相关参数设置。本发明方法实现了作物冠层垂直信息的监测,有助于实现作物
面向田间的轨道式高通量作物表型采集平台及方法.pdf
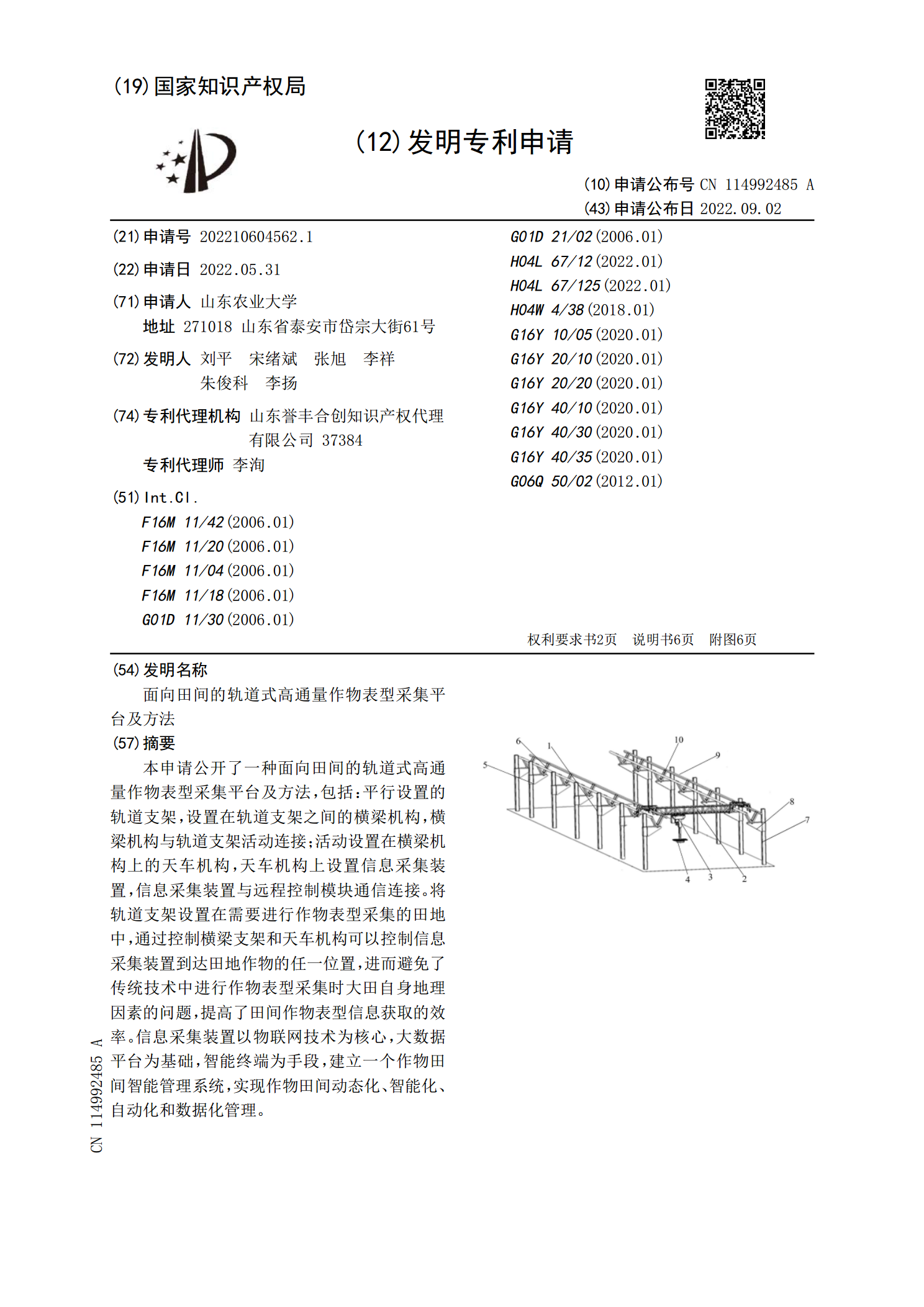
本申请公开了一种面向田间的轨道式高通量作物表型采集平台及方法,包括:平行设置的轨道支架,设置在轨道支架之间的横梁机构,横梁机构与轨道支架活动连接;活动设置在横梁机构上的天车机构,天车机构上设置信息采集装置,信息采集装置与远程控制模块通信连接。将轨道支架设置在需要进行作物表型采集的田地中,通过控制横梁支架和天车机构可以控制信息采集装置到达田地作物的任一位置,进而避免了传统技术中进行作物表型采集时大田自身地理因素的问题,提高了田间作物表型信息获取的效率。信息采集装置以物联网技术为核心,大数据平台为基础,智能终

温室内作物表型监测平台的设计与搭建的开题报告.docx
温室内作物表型监测平台的设计与搭建的开题报告一、选题背景随着人口的不断增长和城市化的加速,农业生产也面临着诸多挑战,如气候变化、种植环境受污染等问题。而温室技术作为现代农业生产的一种重要方式,其在农业生产中发挥着越来越重要的作用。但是,温室内的种植环境与大自然中昼夜、气温、湿度等环境存在较大差异,导致作物在温室环境中展现出不同于自然环境中的表型特征。因此,温室内作物的表型监测研究具有重要意义。二、研究目的本文旨在设计和搭建一种基于计算机视觉技术的温室内作物表型监测平台,实现对作物在温室环境中的生长和表型特