
一种基于立体视觉的盲人辅助行走装置及其辅助方法.pdf

是你****松呀

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于立体视觉的盲人辅助行走装置及其辅助方法.pdf
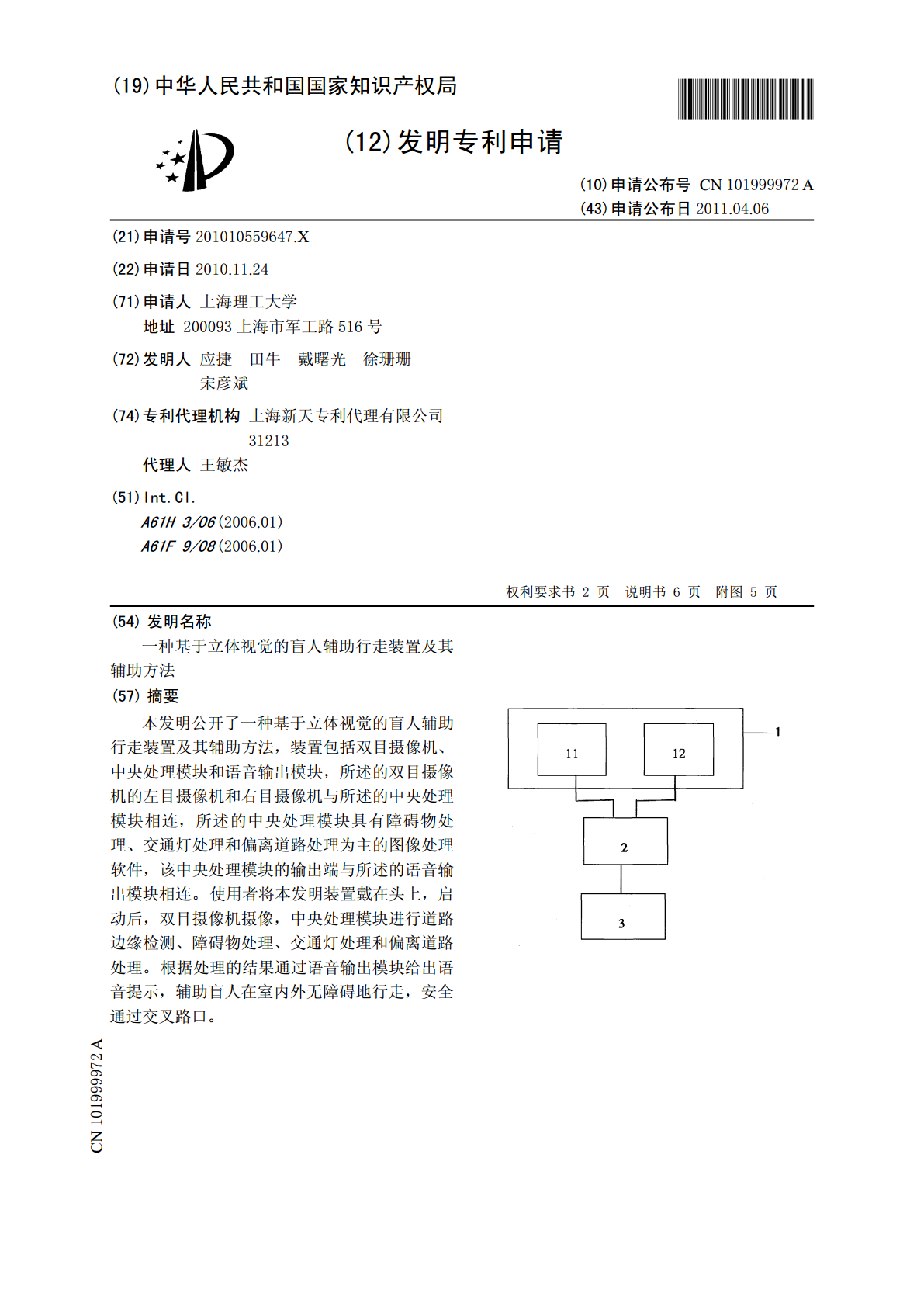
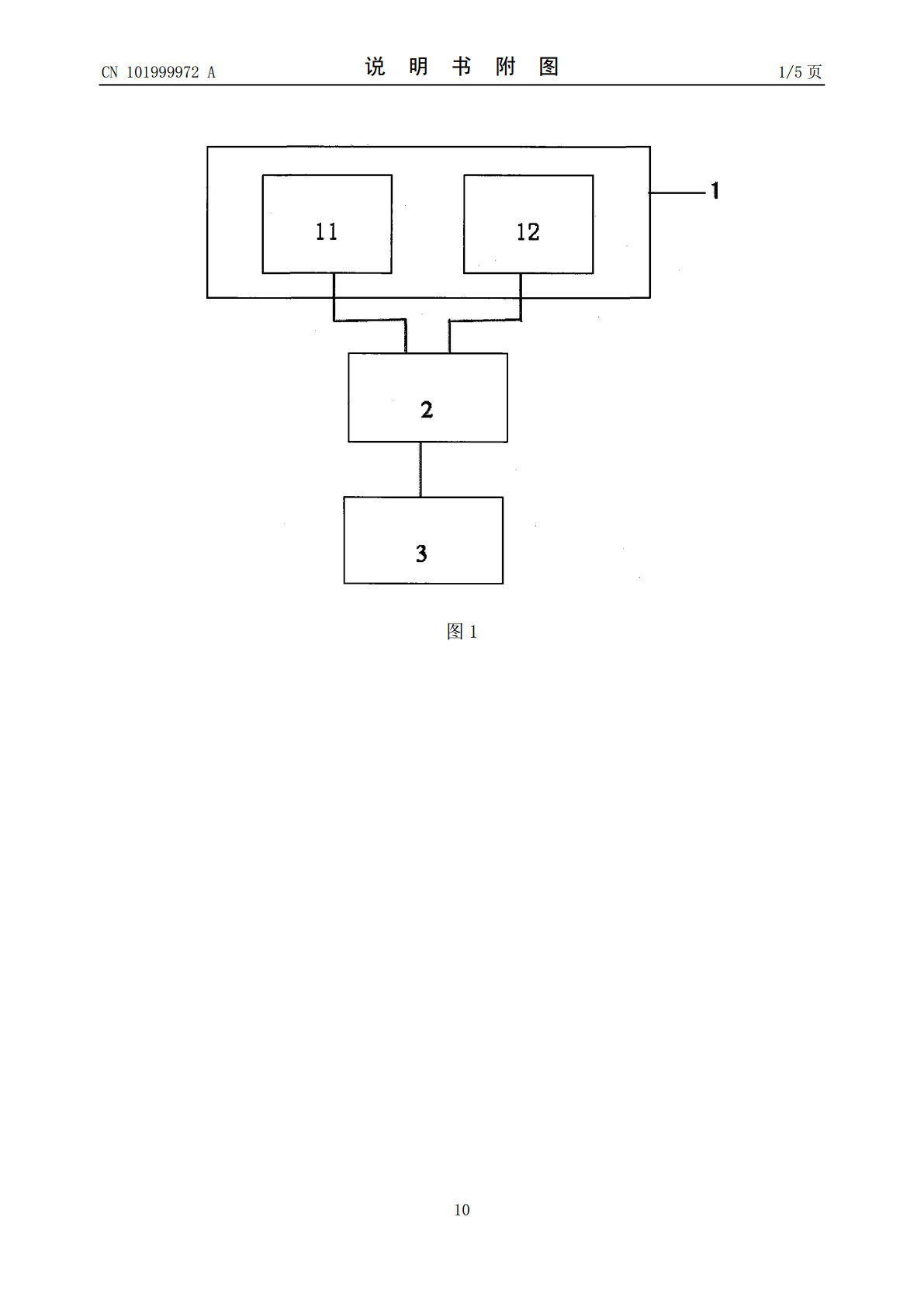
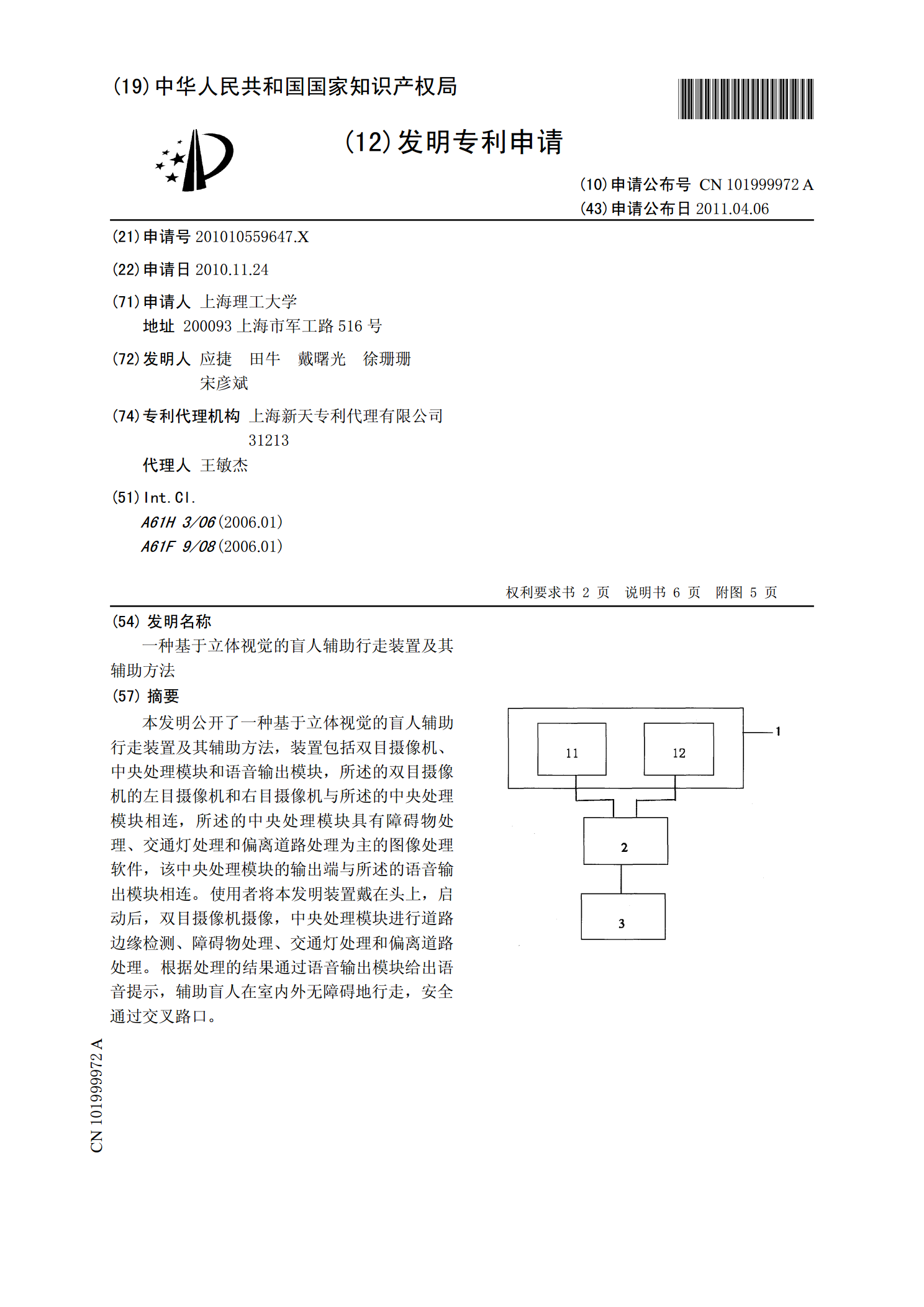
本发明公开了一种基于立体视觉的盲人辅助行走装置及其辅助方法,装置包括双目摄像机、中央处理模块和语音输出模块,所述的双目摄像机的左目摄像机和右目摄像机与所述的中央处理模块相连,所述的中央处理模块具有障碍物处理、交通灯处理和偏离道路处理为主的图像处理软件,该中央处理模块的输出端与所述的语音输出模块相连。使用者将本发明装置戴在头上,启动后,双目摄像机摄像,中央处理模块进行道路边缘检测、障碍物处理、交通灯处理和偏离道路处理。根据处理的结果通过语音输出模块给出语音提示,辅助盲人在室内外无障碍地行走,安全通过交叉路口
基于深度图的盲人辅助行走装置及其辅助方法.pdf
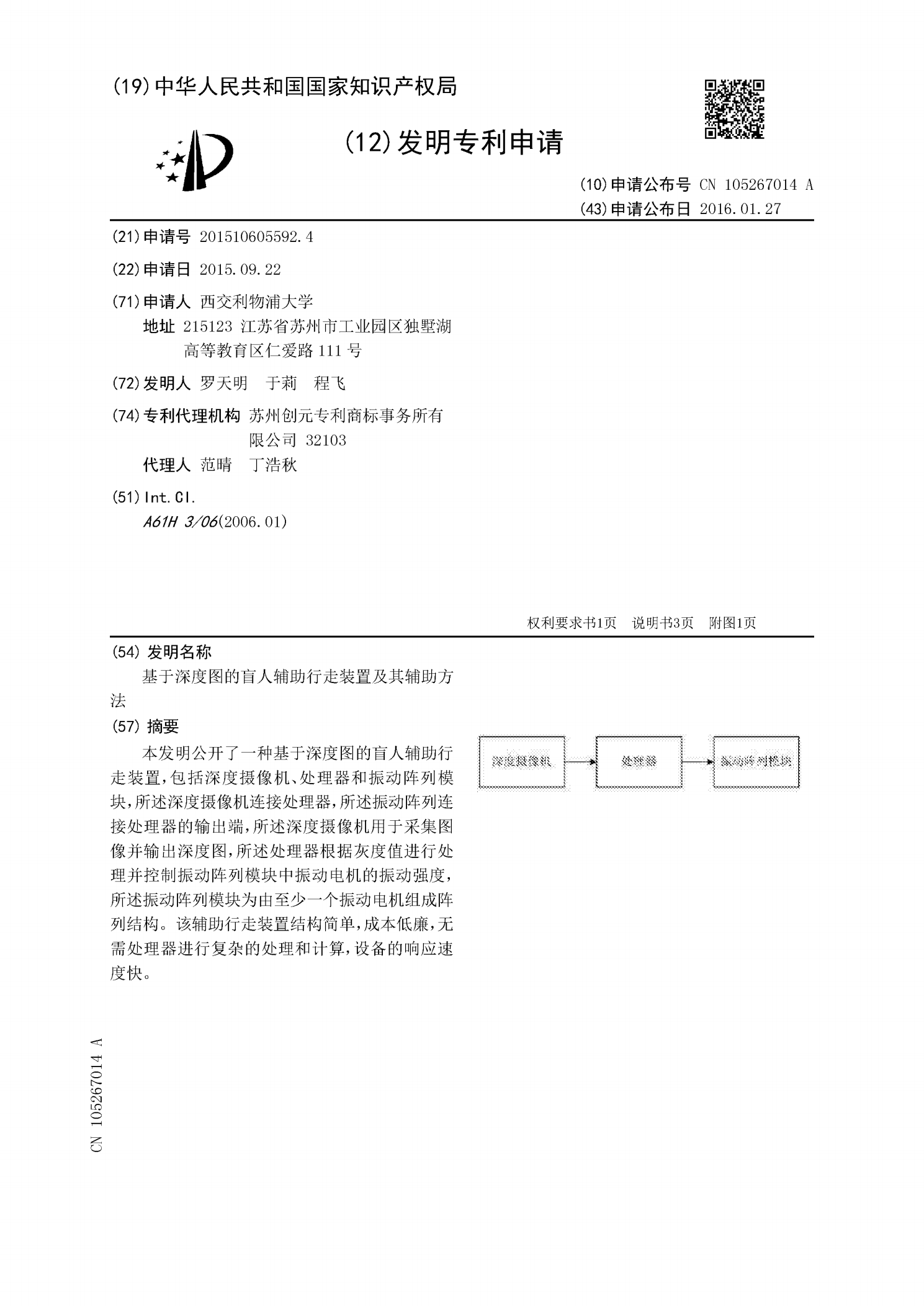
本发明公开了一种基于深度图的盲人辅助行走装置,包括深度摄像机、处理器和振动阵列模块,所述深度摄像机连接处理器,所述振动阵列连接处理器的输出端,所述深度摄像机用于采集图像并输出深度图,所述处理器根据灰度值进行处理并控制振动阵列模块中振动电机的振动强度,所述振动阵列模块为由至少一个振动电机组成阵列结构。该辅助行走装置结构简单,成本低廉,无需处理器进行复杂的处理和计算,设备的响应速度快。
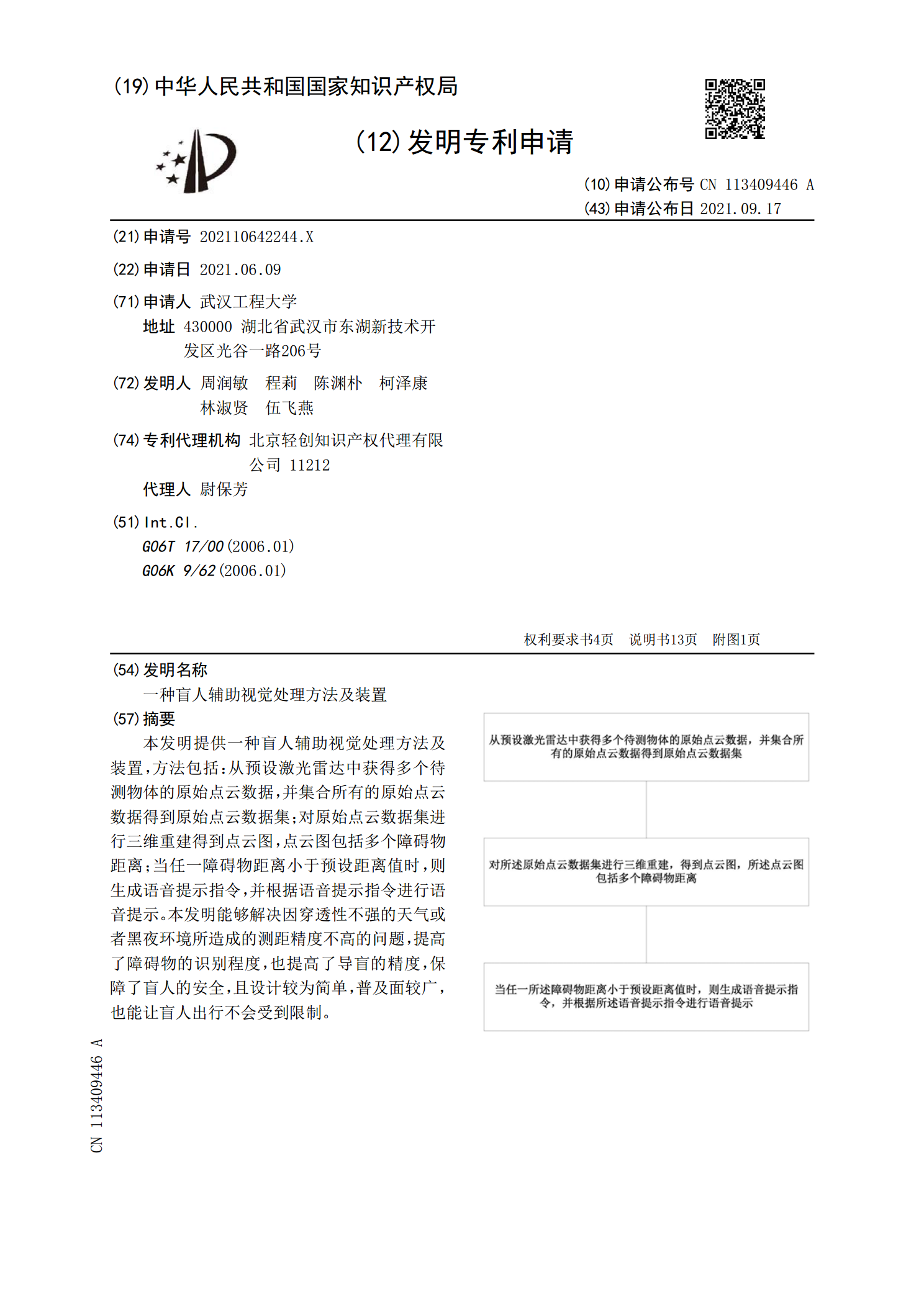
一种盲人辅助视觉处理方法及装置.pdf
本发明提供一种盲人辅助视觉处理方法及装置,方法包括:从预设激光雷达中获得多个待测物体的原始点云数据,并集合所有的原始点云数据得到原始点云数据集;对原始点云数据集进行三维重建得到点云图,点云图包括多个障碍物距离;当任一障碍物距离小于预设距离值时,则生成语音提示指令,并根据语音提示指令进行语音提示。本发明能够解决因穿透性不强的天气或者黑夜环境所造成的测距精度不高的问题,提高了障碍物的识别程度,也提高了导盲的精度,保障了盲人的安全,且设计较为简单,普及面较广,也能让盲人出行不会受到限制。
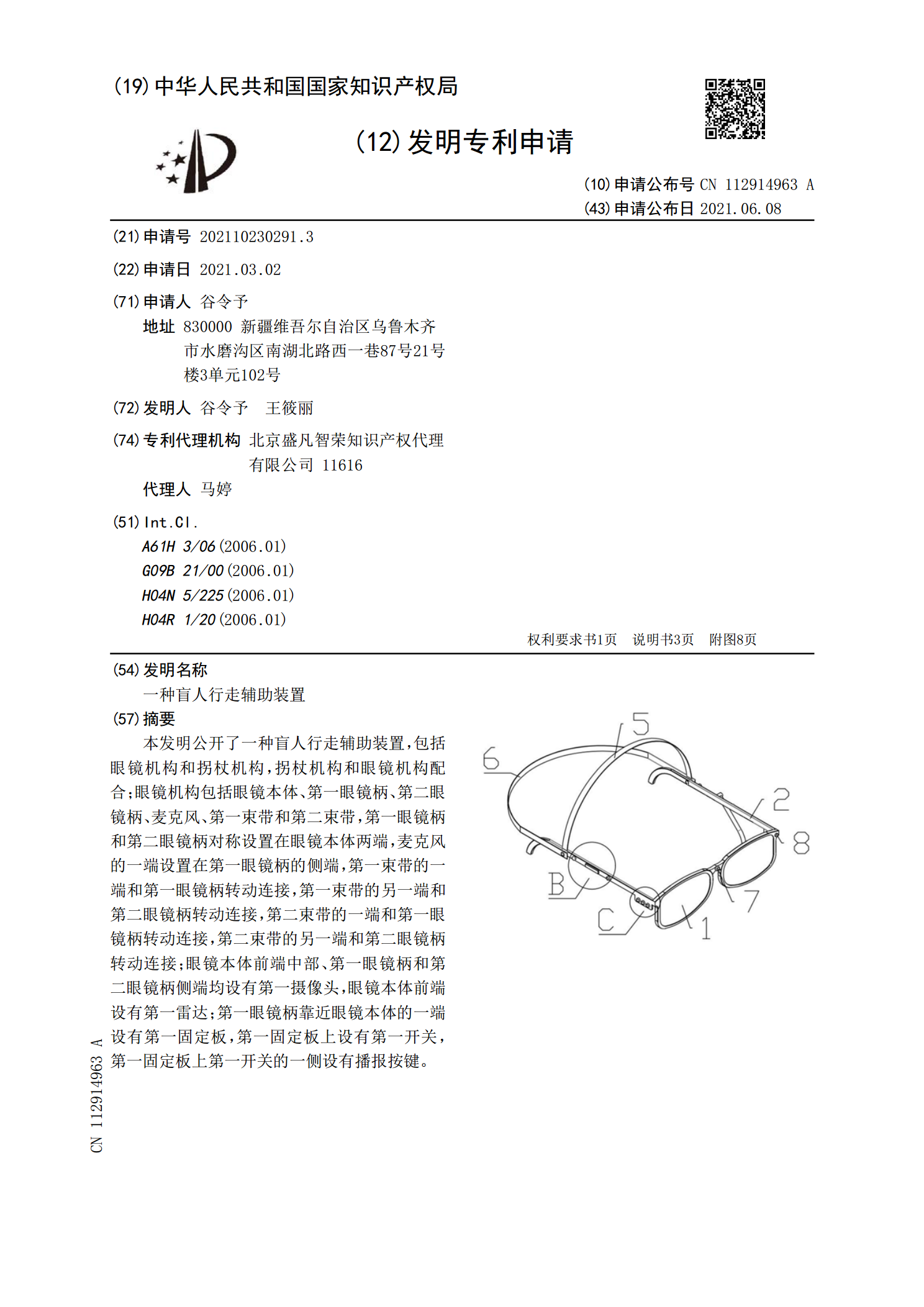
一种盲人行走辅助装置.pdf
本发明公开了一种盲人行走辅助装置,包括眼镜机构和拐杖机构,拐杖机构和眼镜机构配合;眼镜机构包括眼镜本体、第一眼镜柄、第二眼镜柄、麦克风、第一束带和第二束带,第一眼镜柄和第二眼镜柄对称设置在眼镜本体两端,麦克风的一端设置在第一眼镜柄的侧端,第一束带的一端和第一眼镜柄转动连接,第一束带的另一端和第二眼镜柄转动连接,第二束带的一端和第一眼镜柄转动连接,第二束带的另一端和第二眼镜柄转动连接;眼镜本体前端中部、第一眼镜柄和第二眼镜柄侧端均设有第一摄像头,眼镜本体前端设有第一雷达;第一眼镜柄靠近眼镜本体的一端设有第一
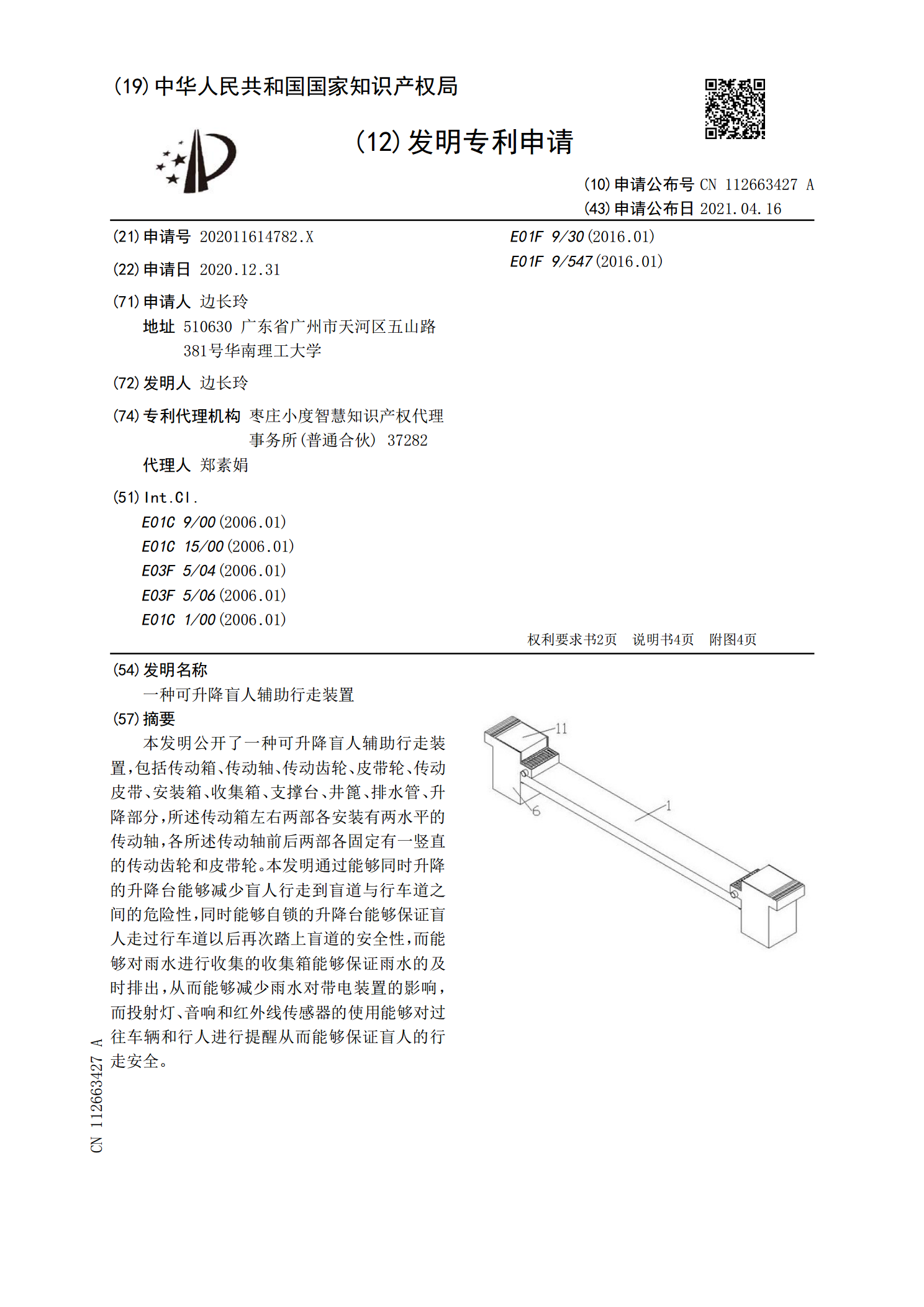
一种可升降盲人辅助行走装置.pdf
本发明公开了一种可升降盲人辅助行走装置,包括传动箱、传动轴、传动齿轮、皮带轮、传动皮带、安装箱、收集箱、支撑台、井篦、排水管、升降部分,所述传动箱左右两部各安装有两水平的传动轴,各所述传动轴前后两部各固定有一竖直的传动齿轮和皮带轮。本发明通过能够同时升降的升降台能够减少盲人行走到盲道与行车道之间的危险性,同时能够自锁的升降台能够保证盲人走过行车道以后再次踏上盲道的安全性,而能够对雨水进行收集的收集箱能够保证雨水的及时排出,从而能够减少雨水对带电装置的影响,而投射灯、音响和红外线传感器的使用能够对过往车辆和