
用于辅助驾驶的全景式影像生成方法.pdf

fu****级甜


1/8

2/8

3/8

4/8
5/8
6/8

7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
用于辅助驾驶的全景式影像生成方法.pdf
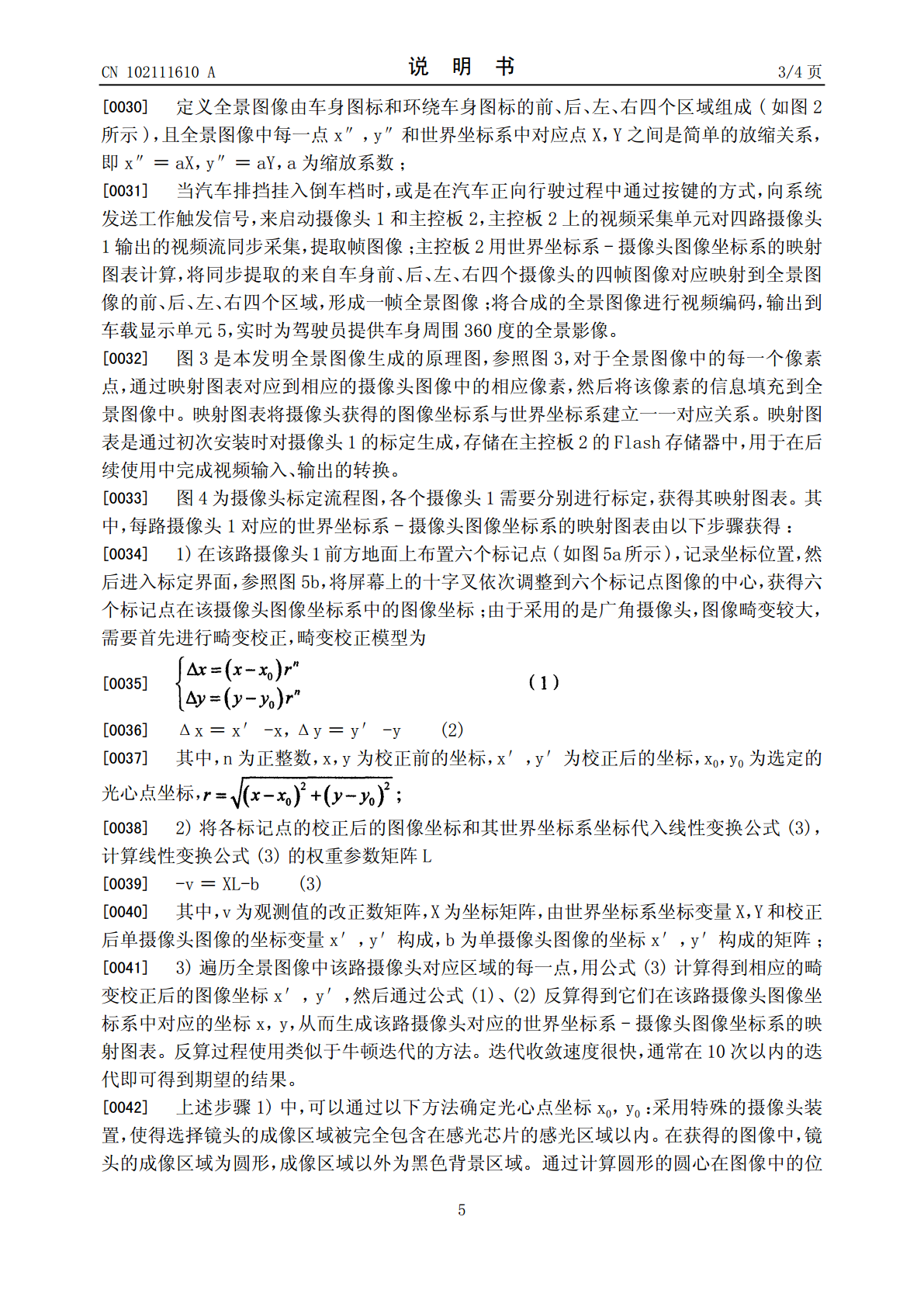
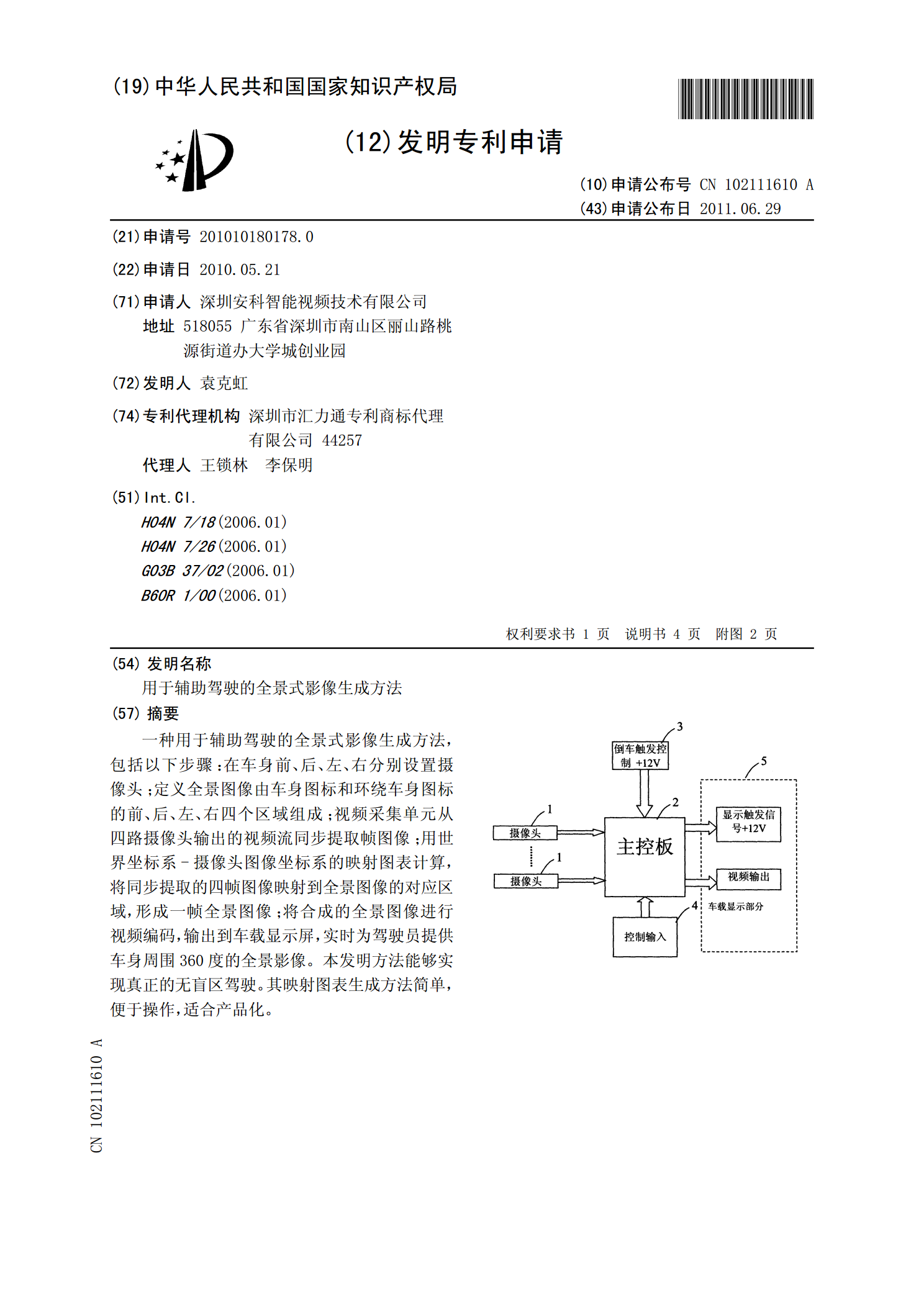
一种用于辅助驾驶的全景式影像生成方法,包括以下步骤:在车身前、后、左、右分别设置摄像头;定义全景图像由车身图标和环绕车身图标的前、后、左、右四个区域组成;视频采集单元从四路摄像头输出的视频流同步提取帧图像;用世界坐标系-摄像头图像坐标系的映射图表计算,将同步提取的四帧图像映射到全景图像的对应区域,形成一帧全景图像;将合成的全景图像进行视频编码,输出到车载显示屏,实时为驾驶员提供车身周围360度的全景影像。本发明方法能够实现真正的无盲区驾驶。其映射图表生成方法简单,便于操作,适合产品化。

利用正射影像生成立体辅助影像方法比较.docx
利用正射影像生成立体辅助影像方法比较正射影像生成立体辅助影像是在数字图像处理领域中的重要应用之一,其可以将原本单视角的图像转化为多视角的图像,增加了立体感,方便后续的三维建模、场景重建等应用。本文将分别从图像匹配、三维重建、立体匹配和精度评估四个方面阐述正射影像生成立体辅助影像的方法比较。一、图像匹配图像匹配是生成立体辅助影像的第一步,它是实现三维重建的基础。传统的图像匹配方法是基于特征点的匹配,其中最经典的是SIFT算法。但是这种算法存在着计算量大、耗时长、对图像质量敏感等问题,无法处理大规模数据。近年

用于低速驾驶辅助的方法和设备.pdf
本发明涉及自动驾驶技术领域。本发明提供一种用于低速驾驶辅助的方法,所述方法包括以下步骤:S1:借助车载传感器获取关于车辆的周围环境对象的第一观测数据;S2:基于V2X技术接收关于车辆的周围环境对象的第二观测数据;S3:响应于车辆进入低速区间,以降低的融合等级对第一观测数据和第二观测数据进行初步融合;以及,S4:将初步融合的结果用于驾驶辅助功能。本发明还提供一种用于低速驾驶辅助的设备。在低速环境中,车载感知系统由于灵敏度和算法限制而无法实现交通环境的完整复现,本发明旨在通过引入V2X技术以及适当调整数据融合

用于自动驾驶的辅助通信方法.pdf
本发明涉及自动驾驶汽车领域,特别涉及一种用于自动驾驶的辅助通信方法,所述方法应用于如下场景中:当本车遇到障碍物而改变行驶方向时,为避免在改变后的行驶方向上与朝向本车行驶的车辆发生碰撞,该方法包括:若所述朝向本车行驶的车辆具备车路通信功能,则通过车路通信得出所述本车还是所述朝向本车行驶的车辆有优先通过权;或者若所述朝向本车行驶的车辆不具备车路通信功能,则所述本车自动发出提醒信号以提示所述朝向本车行驶的车辆优先行驶;或者通过所述本车前部安装的摄像头或照相机来识别所述朝向本车行驶的车辆中驾驶员的手势,并以此来判

一种全景影像驾驶辅助装置及方法.pdf
本发明涉及一种驾驶辅助装置及方法,包括图像采集装置,显示器,图像处理装置及报警器;通过使用多个优化布置的图像采集装置和图像处理装置,获取并分析处理车辆周围的图像信息。一方面,取消了汽车上传统的物理成像后视镜,消除驾驶员视觉盲区,减少汽车空气阻力;另一方面,使用图像处理装置对获取的图像进行处理,识别出在不同行车状态下的危险信息来实现变道和转弯侧碰预警、安全车距预警、道路标志识别预警、车道偏离预警、行人探测与防撞预警等主动安全驾驶辅助功能。