
高压线路运行状态智能巡检系统.pdf

猫巷****盟主


1/9

2/9
3/9

4/9

5/9

6/9

7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
高压线路运行状态智能巡检系统.pdf
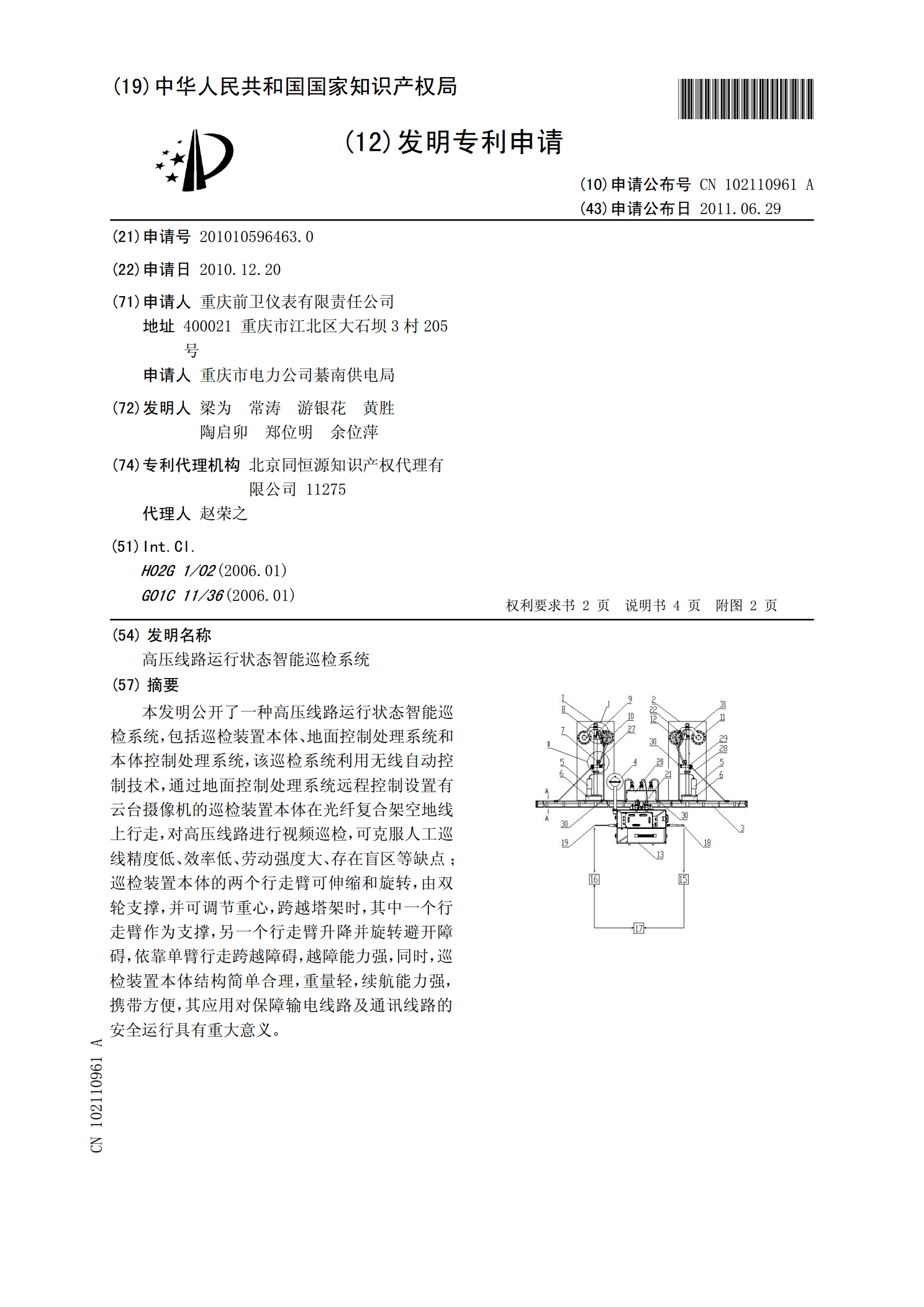
本发明公开了一种高压线路运行状态智能巡检系统,包括巡检装置本体、地面控制处理系统和本体控制处理系统,该巡检系统利用无线自动控制技术,通过地面控制处理系统远程控制设置有云台摄像机的巡检装置本体在光纤复合架空地线上行走,对高压线路进行视频巡检,可克服人工巡线精度低、效率低、劳动强度大、存在盲区等缺点;巡检装置本体的两个行走臂可伸缩和旋转,由双轮支撑,并可调节重心,跨越塔架时,其中一个行走臂作为支撑,另一个行走臂升降并旋转避开障碍,依靠单臂行走跨越障碍,越障能力强,同时,巡检装置本体结构简单合理,重量轻,续航能

高压线路运行状态智能巡检行走装置.pdf
本发明公开了一种高压线路运行状态智能巡检行走装置,包括行走机构、地面控制处理系统和控制处理系统,该巡检系统利用无线自动控制技术,通过地面控制处理系统远程控制设置有云台摄像机的行走机构在光纤复合架空地线上行走,对高压线路进行视频巡检,可克服人工巡线精度低、效率低、劳动强度大、存在盲区等缺点;行走机构的两个行走臂可伸缩和旋转,由双轮支撑,并可调节重心,跨越塔架时,其中一个行走臂作为支撑,另一个行走臂升降并旋转避开障碍,依靠单臂行走跨越障碍,越障能力强,同时,行走机构结构简单合理,重量轻,续航能力强,携带方便,

高压线路运行状态智能巡检行走机构.pdf
本发明公开了一种高压线路运行状态智能巡检行走机构,包括行走臂Ⅰ、行走臂Ⅱ、导轨和箱体组件;行走臂Ⅰ和行走臂Ⅱ均包括旋转组件、升降组件和行走组件,可在光纤复合架空地线上行走,可作为检测设备载体,克服人工巡线精度低、效率低、劳动强度大、存在盲区等缺点,该行走机构的两个行走臂可伸缩和旋转,由双轮支撑,并可通过箱体滑动调节重心,跨越塔架时,其中一个行走臂作为支撑,另一个行走臂升降并旋转避开障碍,依靠单臂行走跨越障碍,越障能力强,同时,行走机构结构简单合理,重量轻,续航能力强,携带方便,其应用对保障输电线路及通讯线

高压线路运行状态巡检方法.pdf
本发明公开了一种高压线路运行状态巡检方法,通过可无线远程遥控在架空地线上行走的巡检装置携带摄像设备进行视频巡检,包括挂线、巡检和跨越障碍步骤,该方法可克服现有人工巡线方法精度低、效率低、劳动强度大、存在盲区等缺点;巡检装置跨越障碍的方式简单易行,相对于现有巡检装置的越障方式,其越障能力强,可跨越塔架等较大障碍,通过一次挂线即可实现对一段较长线路的连续巡检,对保障输电线路及通讯线路的安全运行具有重大意义。

高压线路抢修塔的运行状态监测系统.pdf
本发明涉及一种高压线路抢修塔的运行状态监测系统。该系统包括:倾角测试装置,用于采集立柱的倾角数据,并输出倾角数据;目标数量的张力测试装置,用于采集对应的拉线的张力数据,并输出张力数据;目标数量根据高压线路抢修塔的拉线数量确定;数据接收装置,通信连接倾角测试装置和各张力测试装置,用于接收倾角测试装置输出的倾角数据和各张力测试装置输出的张力数据;数据接收装置还用于对倾角数据和各张力数据进行分析处理,得到立柱的倾角值和各拉线的张力值;数据接收装置还用于根据立柱的倾角值和各拉线的张力值构建抢修塔三维虚拟模型,并显