
磁流变智能皮肤.pdf

一只****呀盟

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
磁流变智能皮肤.pdf
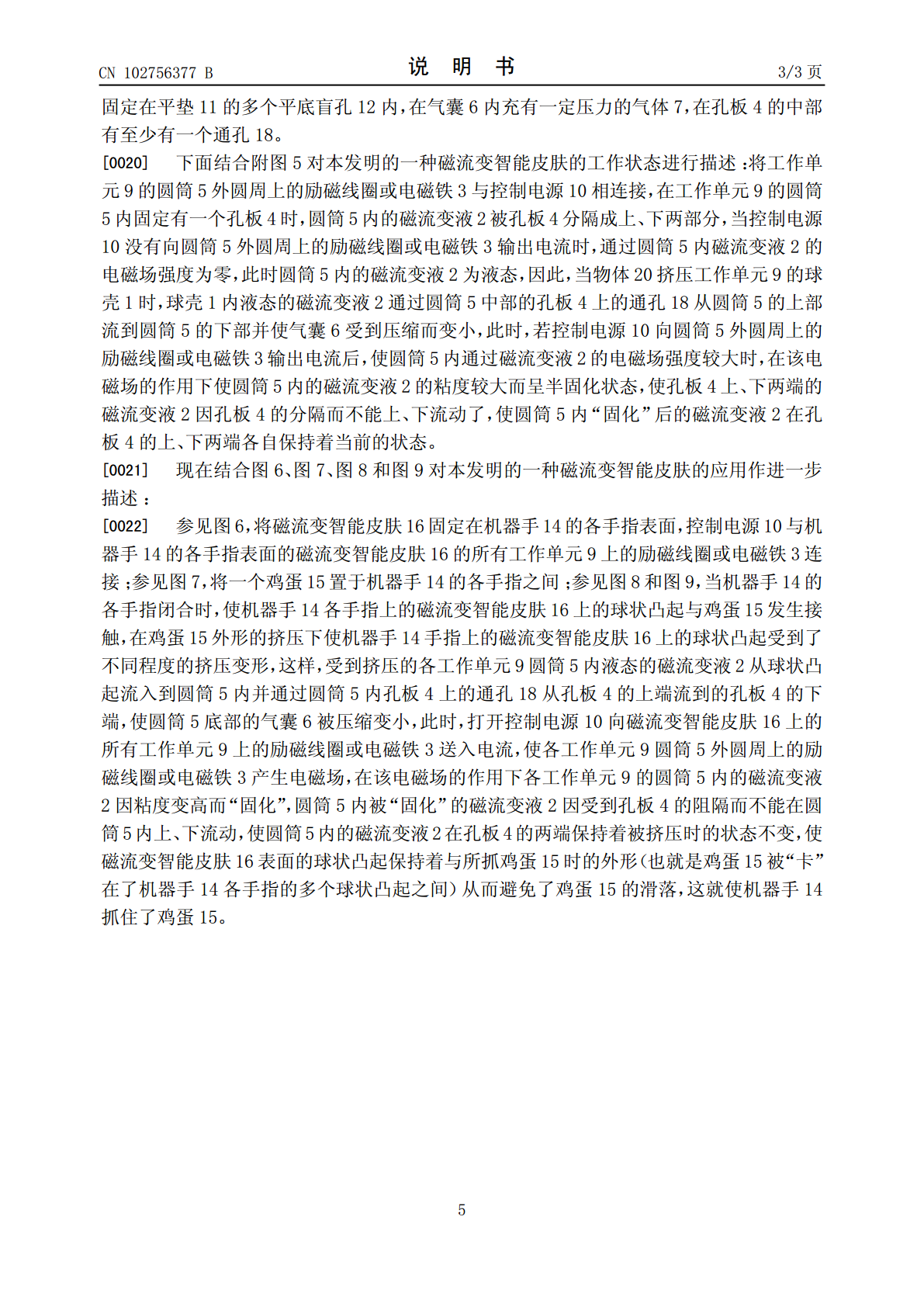
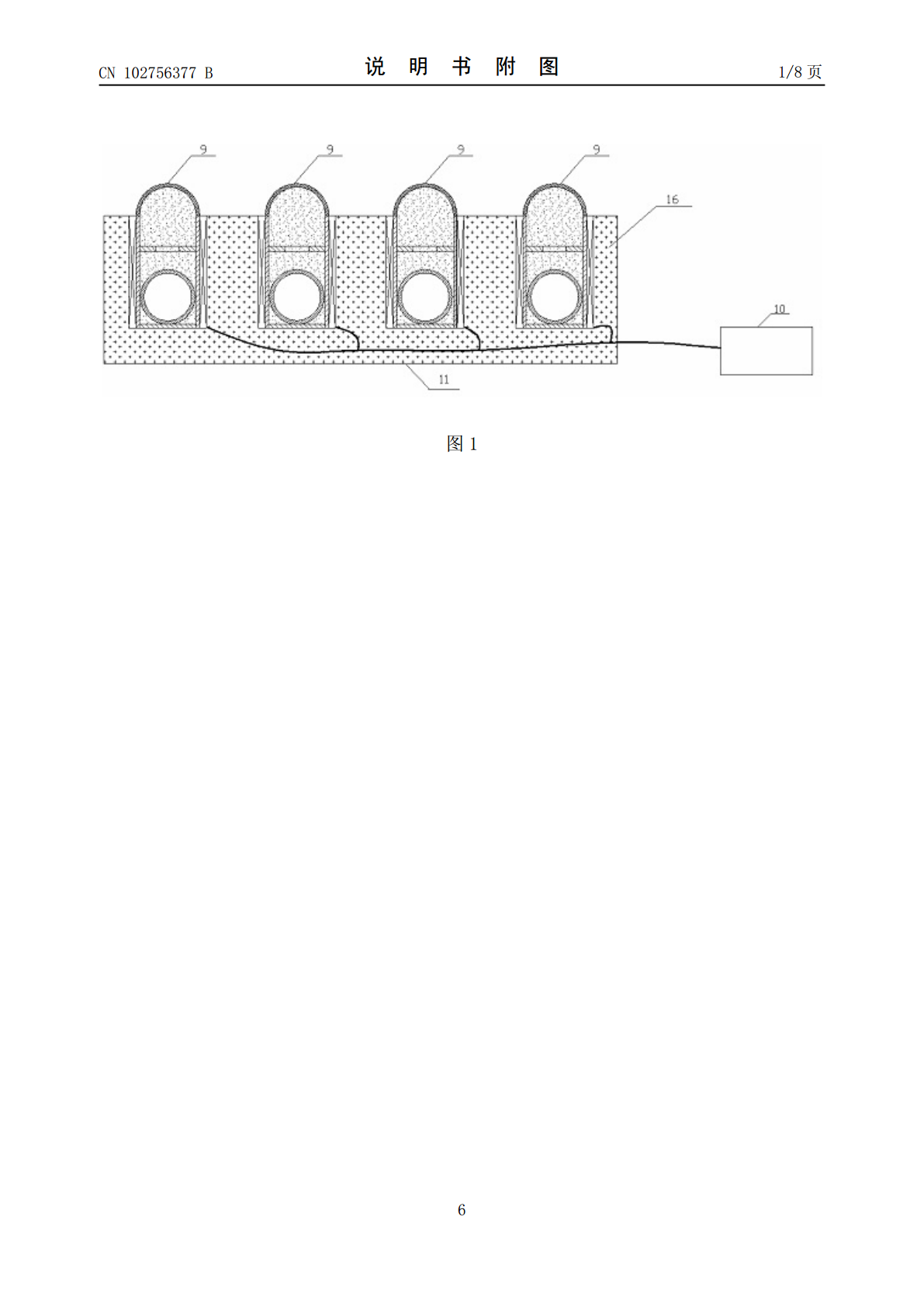
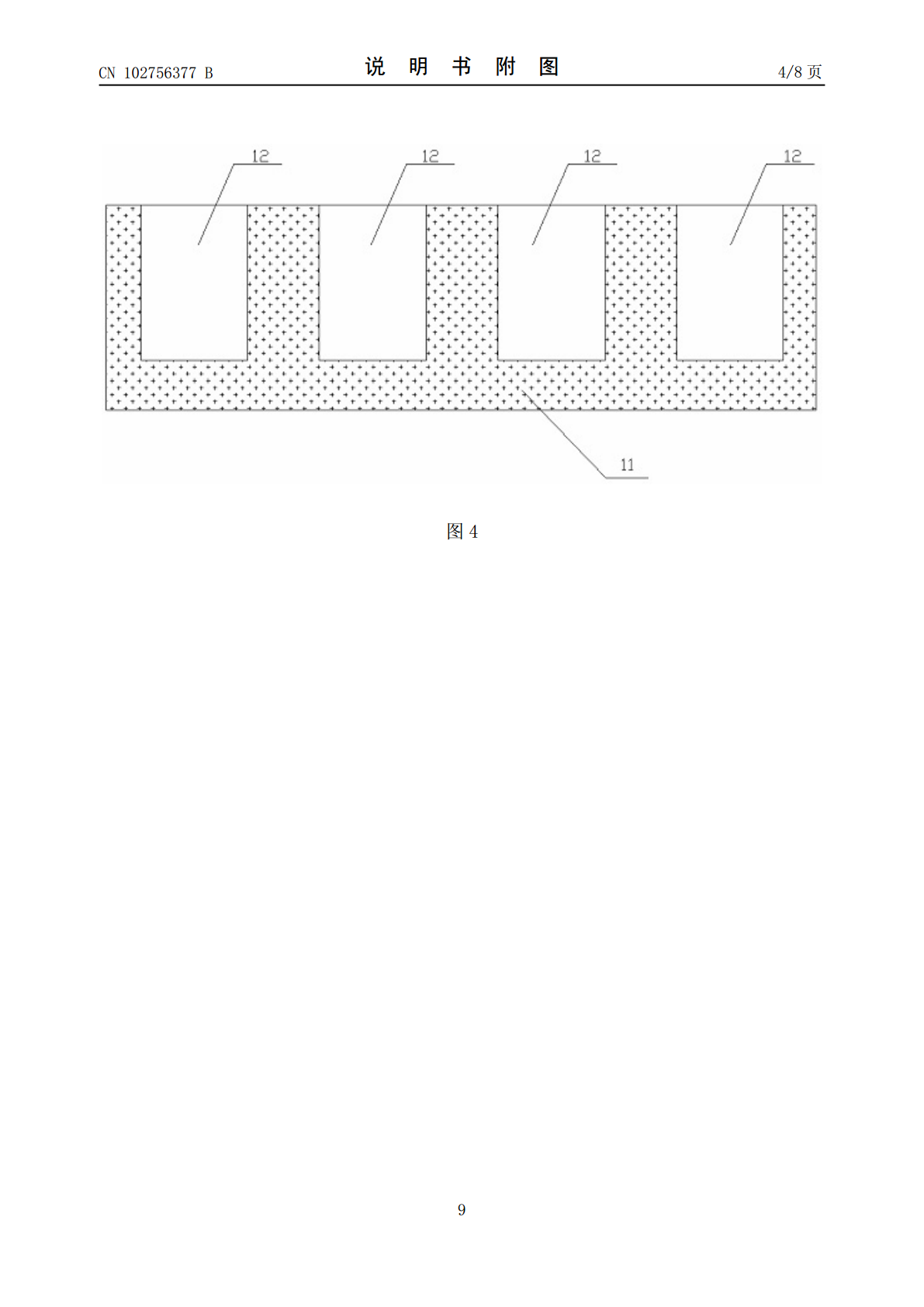
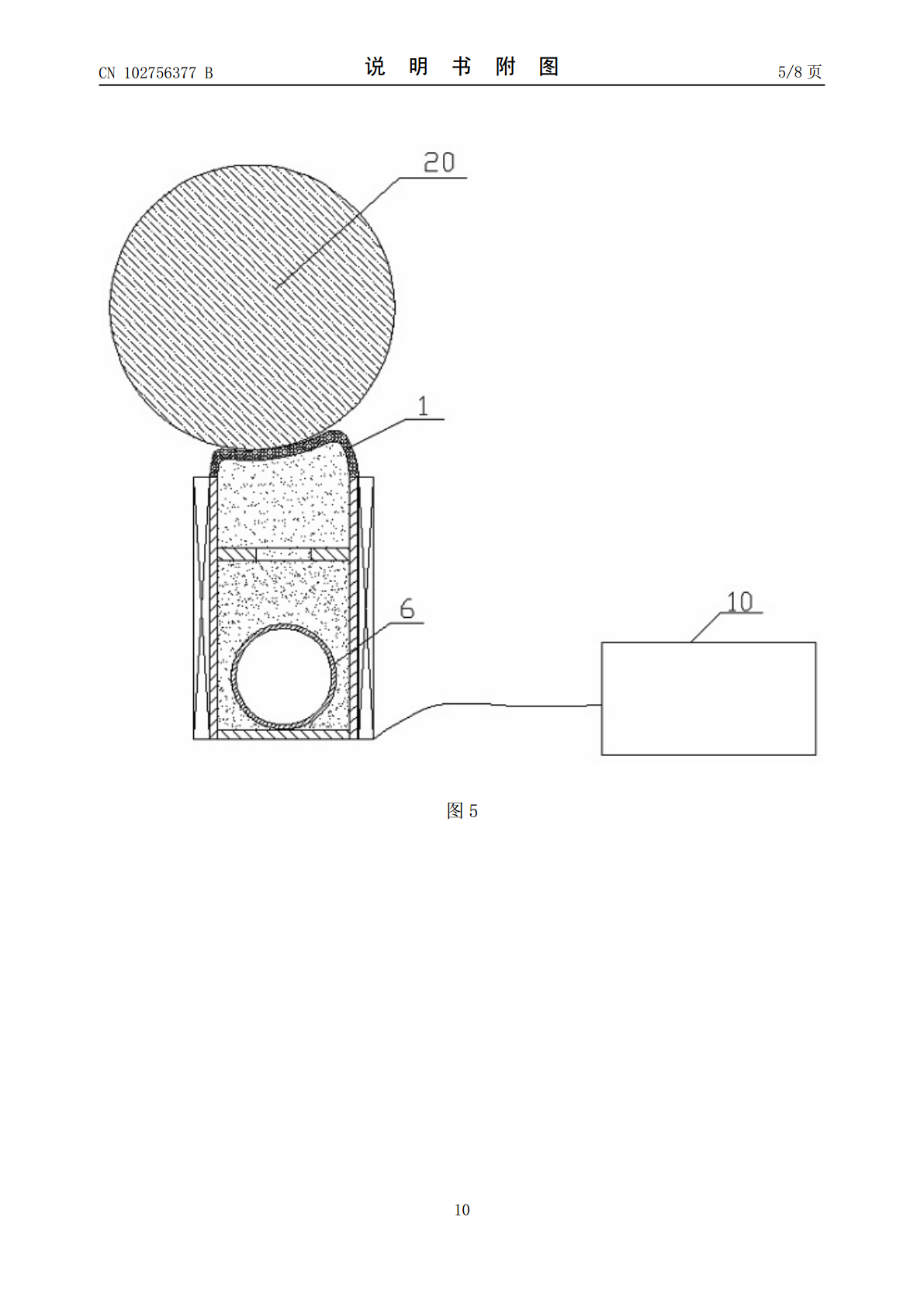
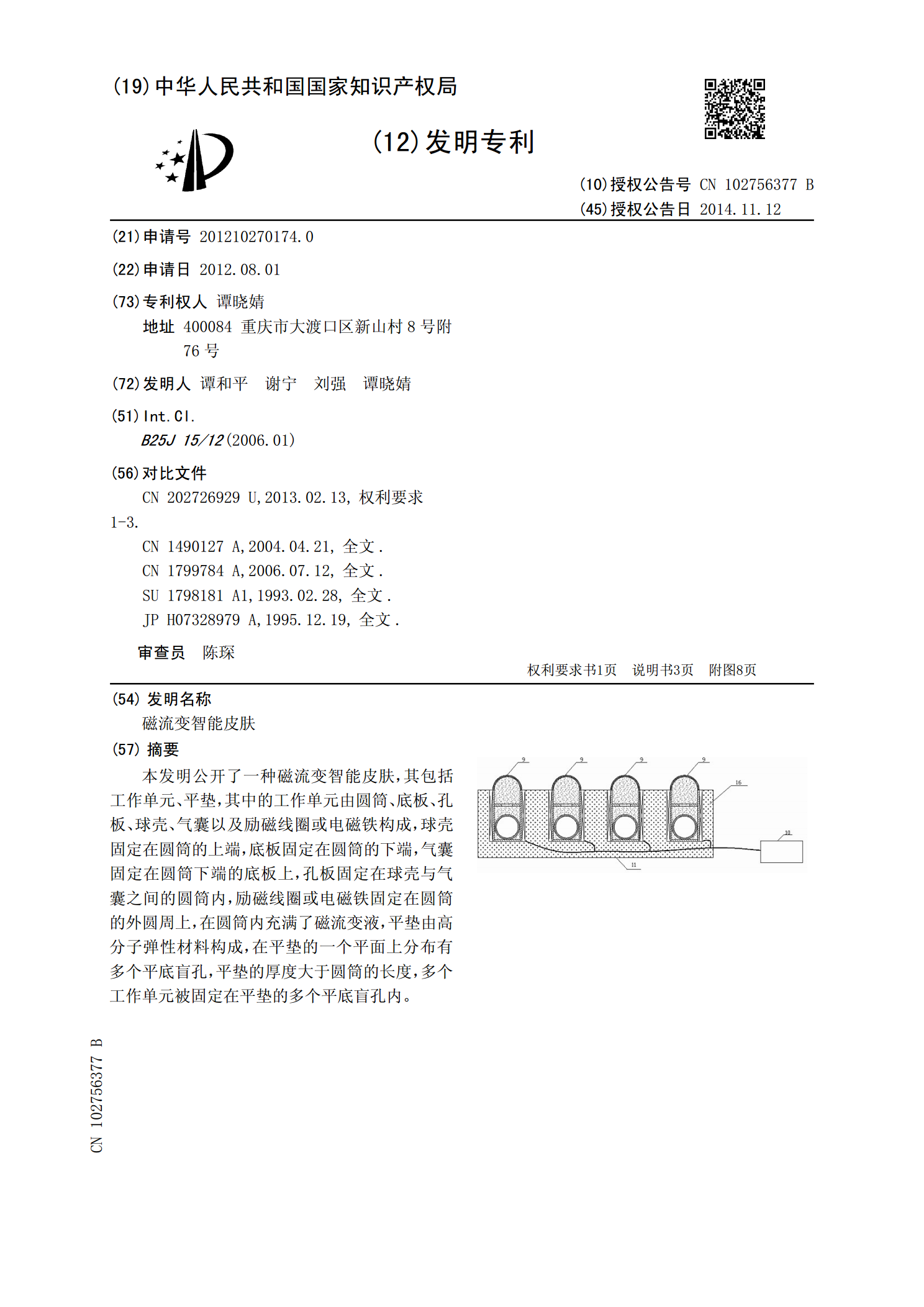
本发明公开了一种磁流变智能皮肤,其包括工作单元、平垫,其中的工作单元由圆筒、底板、孔板、球壳、气囊以及励磁线圈或电磁铁构成,球壳固定在圆筒的上端,底板固定在圆筒的下端,气囊固定在圆筒下端的底板上,孔板固定在球壳与气囊之间的圆筒内,励磁线圈或电磁铁固定在圆筒的外圆周上,在圆筒内充满了磁流变液,平垫由高分子弹性材料构成,在平垫的一个平面上分布有多个平底盲孔,平垫的厚度大于圆筒的长度,多个工作单元被固定在平垫的多个平底盲孔内。
一种磁流变智能皮肤.pdf
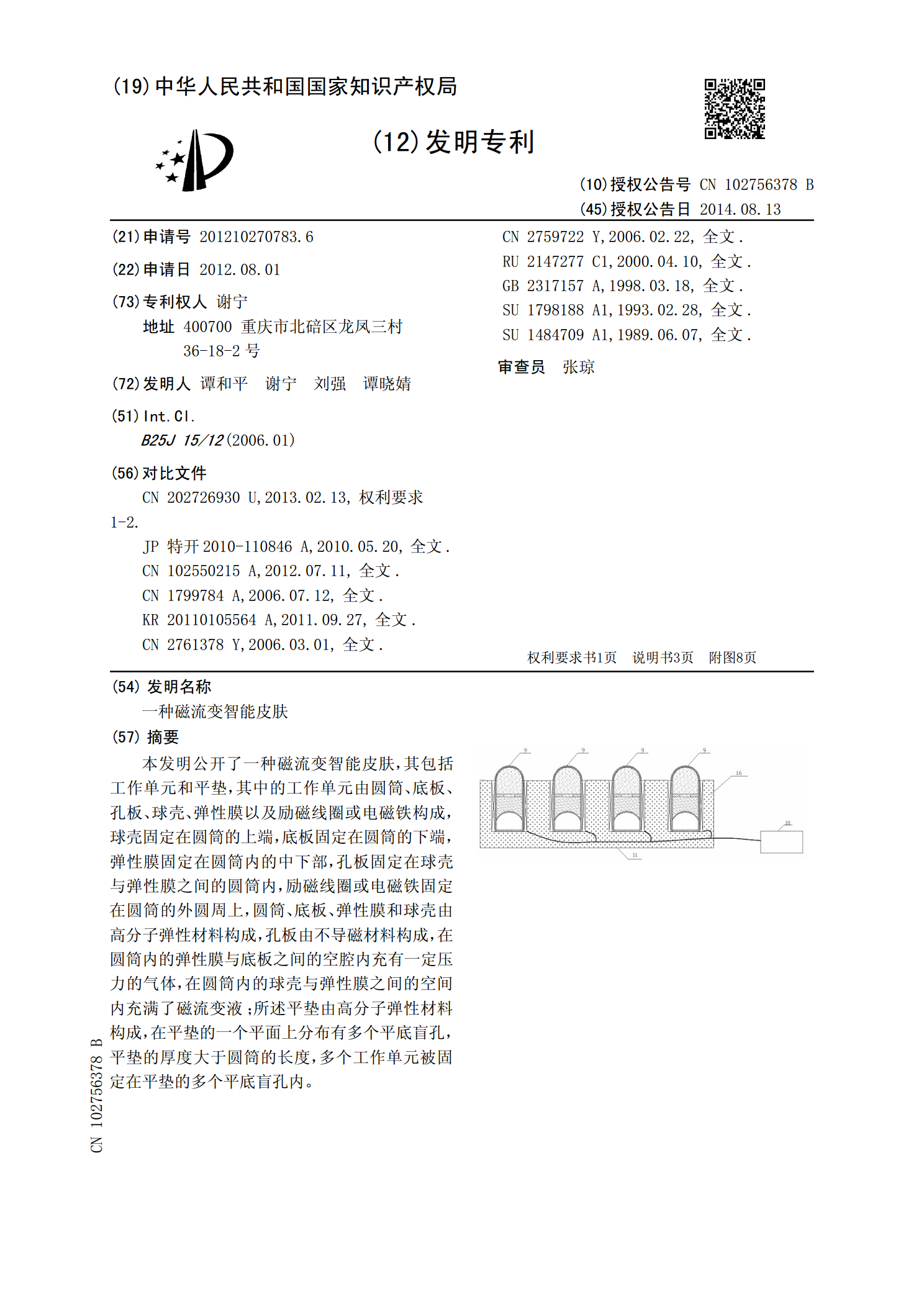
本发明公开了一种磁流变智能皮肤,其包括工作单元和平垫,其中的工作单元由圆筒、底板、孔板、球壳、弹性膜以及励磁线圈或电磁铁构成,球壳固定在圆筒的上端,底板固定在圆筒的下端,弹性膜固定在圆筒内的中下部,孔板固定在球壳与弹性膜之间的圆筒内,励磁线圈或电磁铁固定在圆筒的外圆周上,圆筒、底板、弹性膜和球壳由高分子弹性材料构成,孔板由不导磁材料构成,在圆筒内的弹性膜与底板之间的空腔内充有一定压力的气体,在圆筒内的球壳与弹性膜之间的空间内充满了磁流变液;所述平垫由高分子弹性材料构成,在平垫的一个平面上分布有多个平底盲孔
磁流变智能自适应自行车.pdf
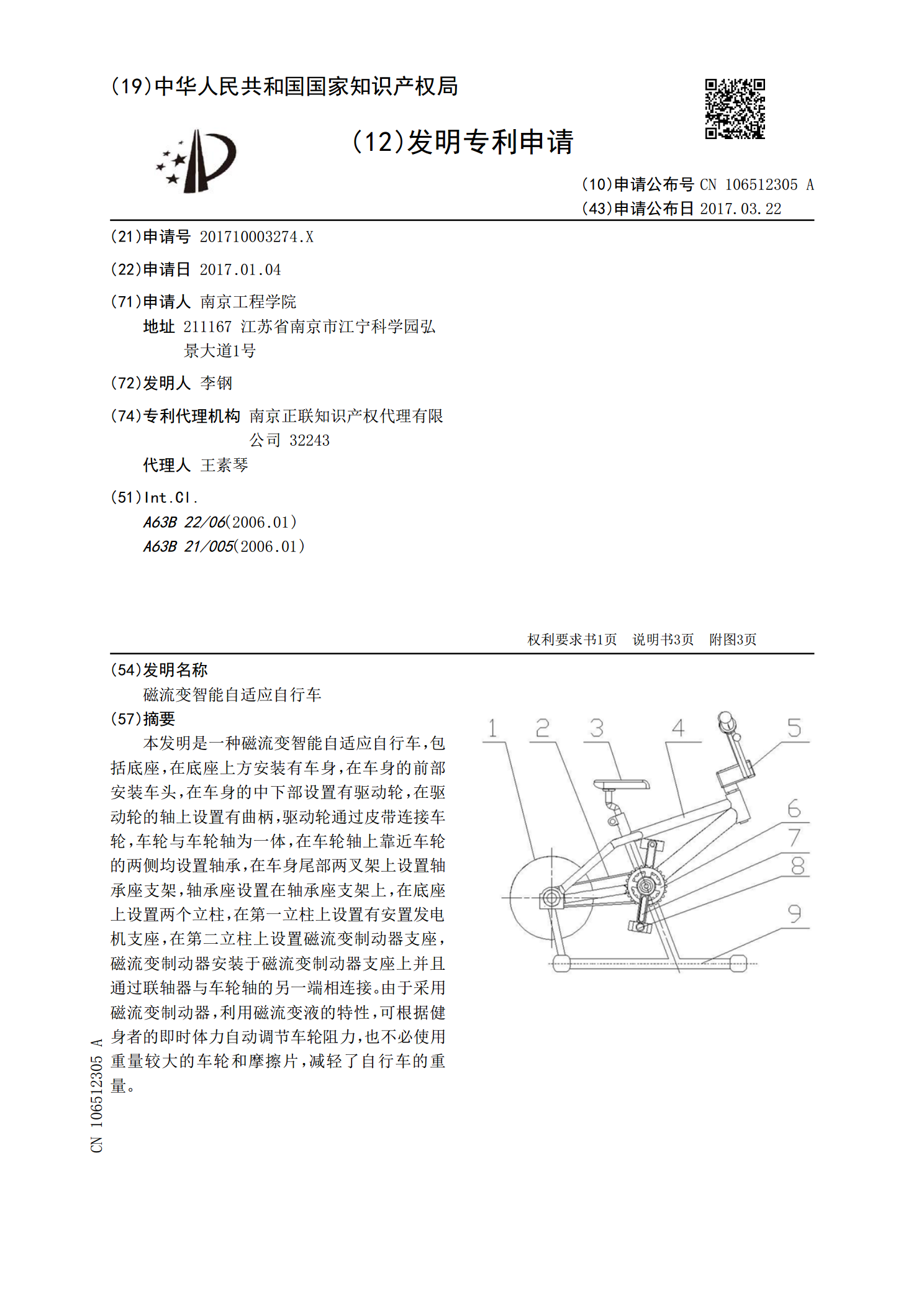
本发明是一种磁流变智能自适应自行车,包括底座,在底座上方安装有车身,在车身的前部安装车头,在车身的中下部设置有驱动轮,在驱动轮的轴上设置有曲柄,驱动轮通过皮带连接车轮,车轮与车轮轴为一体,在车轮轴上靠近车轮的两侧均设置轴承,在车身尾部两叉架上设置轴承座支架,轴承座设置在轴承座支架上,在底座上设置两个立柱,在第一立柱上设置有安置发电机支座,在第二立柱上设置磁流变制动器支座,磁流变制动器安装于磁流变制动器支座上并且通过联轴器与车轮轴的另一端相连接。由于采用磁流变制动器,利用磁流变液的特性,可根据健身者的即时体

一种磁流变智能钻井减振器.pdf
本发明涉及用于石油、天然气和地质钻井的特殊井下工具,一种磁流变智能钻井减振器。它由涡轮发电机模块、传感控制器模块、磁流变阀门、弹簧组和扭转轴承构成,所述涡轮发电机模块、传感控制器模块、磁流变阀门、弹簧组和扭转轴承依次相连接;传感控制器模块内部安置传感控制器;磁流变阀门内部安装有线圈心轴,线圈心轴上环形凹槽内缠绕励磁线圈,线圈心轴与补偿活塞、线圈心轴衬套、阀门套筒共同形成上下腔室;磁流变液密封在上下腔室里,通过阻尼通道在上下腔室之间流动;扭转轴承内部有轴承球滚道,轴承球安置在轴承球滚道中。本发明可进行实时控
一种磁流变阻尼器及磁流变阻尼装置.pdf
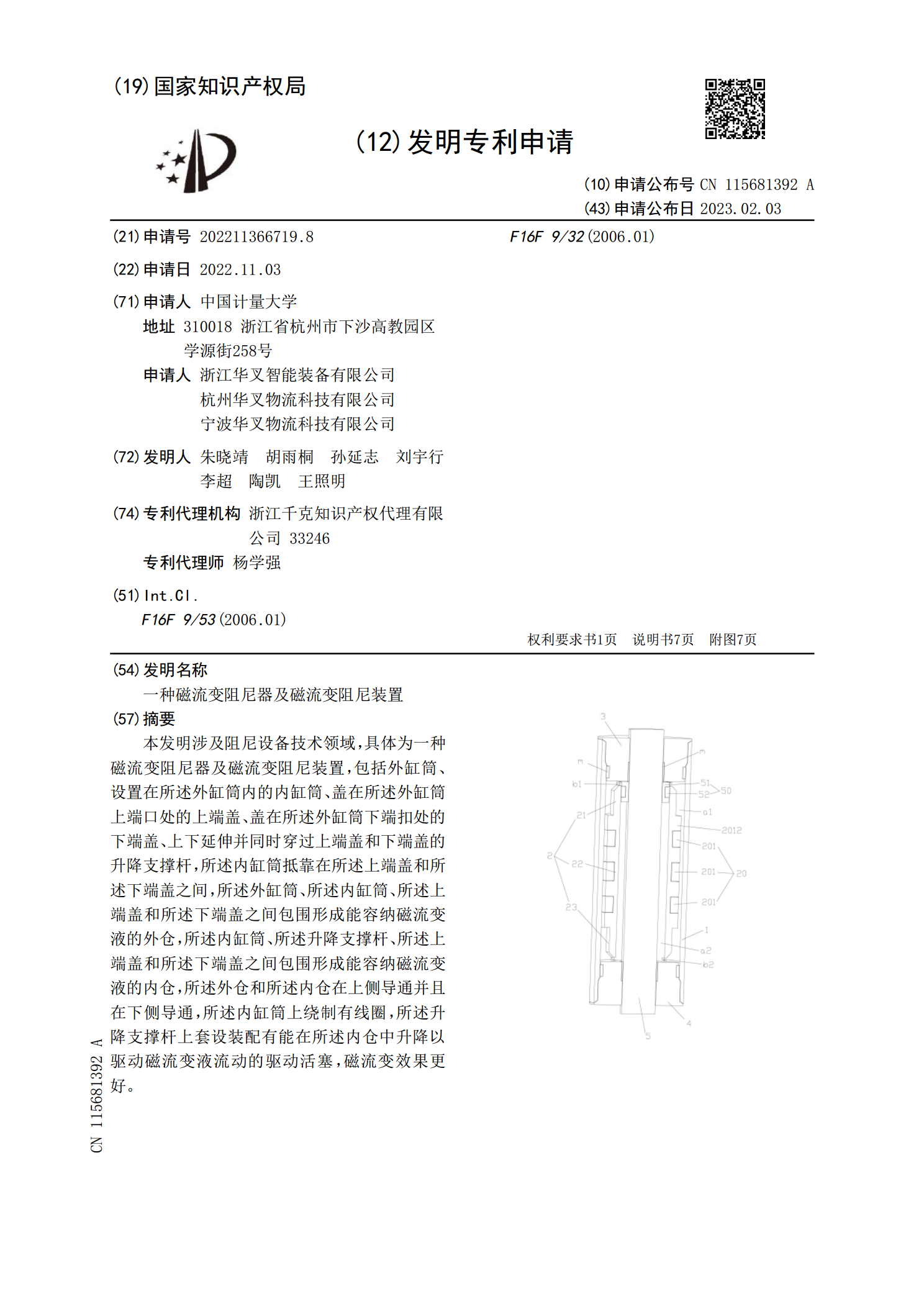
本发明涉及阻尼设备技术领域,具体为一种磁流变阻尼器及磁流变阻尼装置,包括外缸筒、设置在所述外缸筒内的内缸筒、盖在所述外缸筒上端口处的上端盖、盖在所述外缸筒下端扣处的下端盖、上下延伸并同时穿过上端盖和下端盖的升降支撑杆,所述内缸筒抵靠在所述上端盖和所述下端盖之间,所述外缸筒、所述内缸筒、所述上端盖和所述下端盖之间包围形成能容纳磁流变液的外仓,所述内缸筒、所述升降支撑杆、所述上端盖和所述下端盖之间包围形成能容纳磁流变液的内仓,所述外仓和所述内仓在上侧导通并且在下侧导通,所述内缸筒上绕制有线圈,所述升降支撑杆上