
利用SINS/图像匹配组合导航进行火星捕获的方法.pdf

雨星****萌娃


1/9

2/9

3/9
4/9
5/9
6/9
7/9
8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
利用SINS/图像匹配组合导航进行火星捕获的方法.pdf
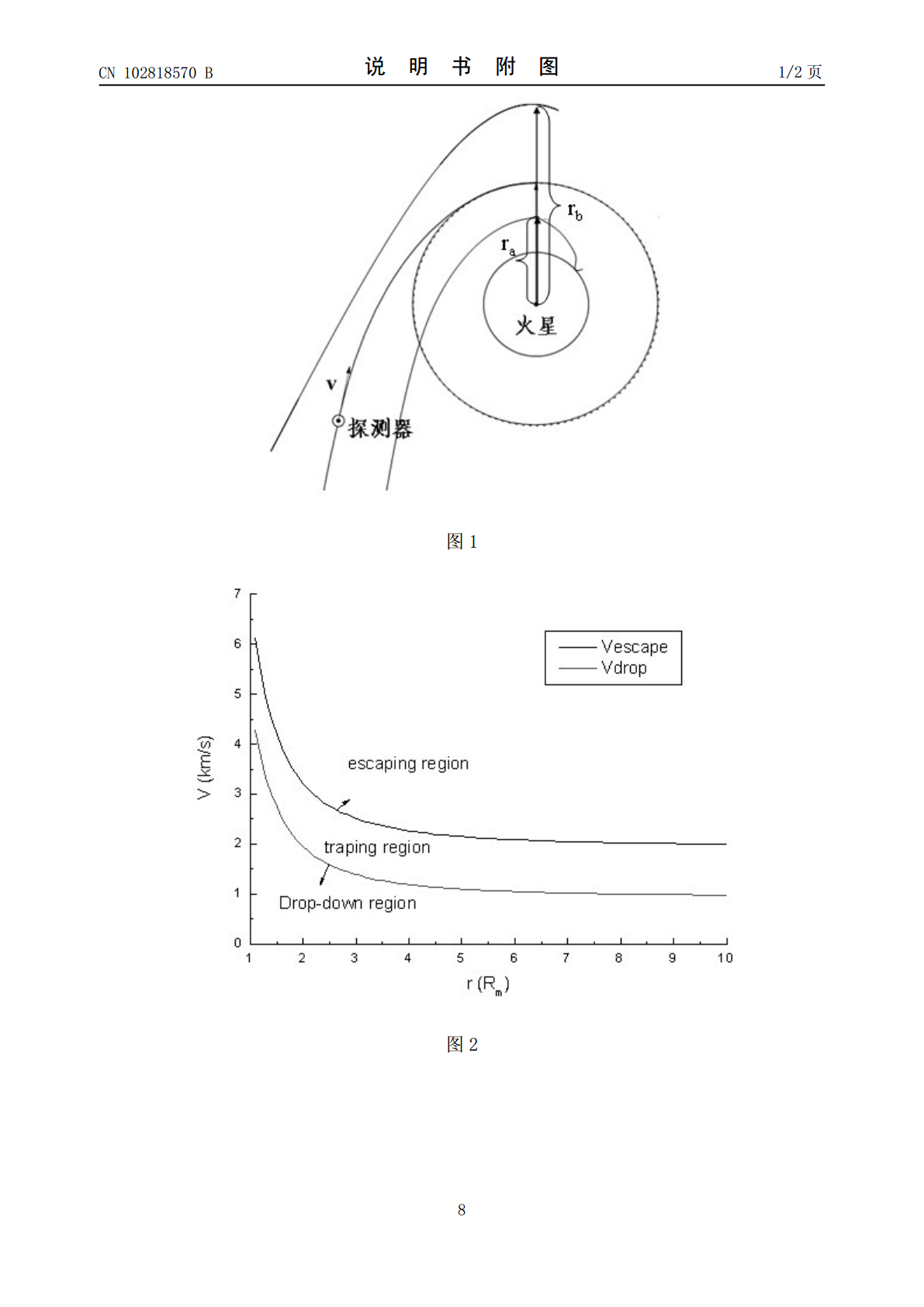
本发明公开一种利用SINS/图像匹配组合导航进行火星捕获的方法,首先利用SINS给出探测器当前的位置和姿态;然后建立SINS/图像匹配组合导航模型,利用图像匹配算法辅助修正SINS的输出结果,给出探测器当前的精确位置和姿态;同时,通过提取和跟踪目标火星轮廓边缘可确定探测器位置变化和姿态变化;并且,利用最优组合滤波算法给出探测器的多信息融合后的状态信息,即对探测器进行导航定位;最后确定探测器入轨的状态,形成控制指令,实现探测器的自主精确捕获。本发明符合深空探测器小型化、高集成化、多功能化发展的趋势。其实时性
卫星导航辅助SINS进行初始方位对准的方法及装置.pdf
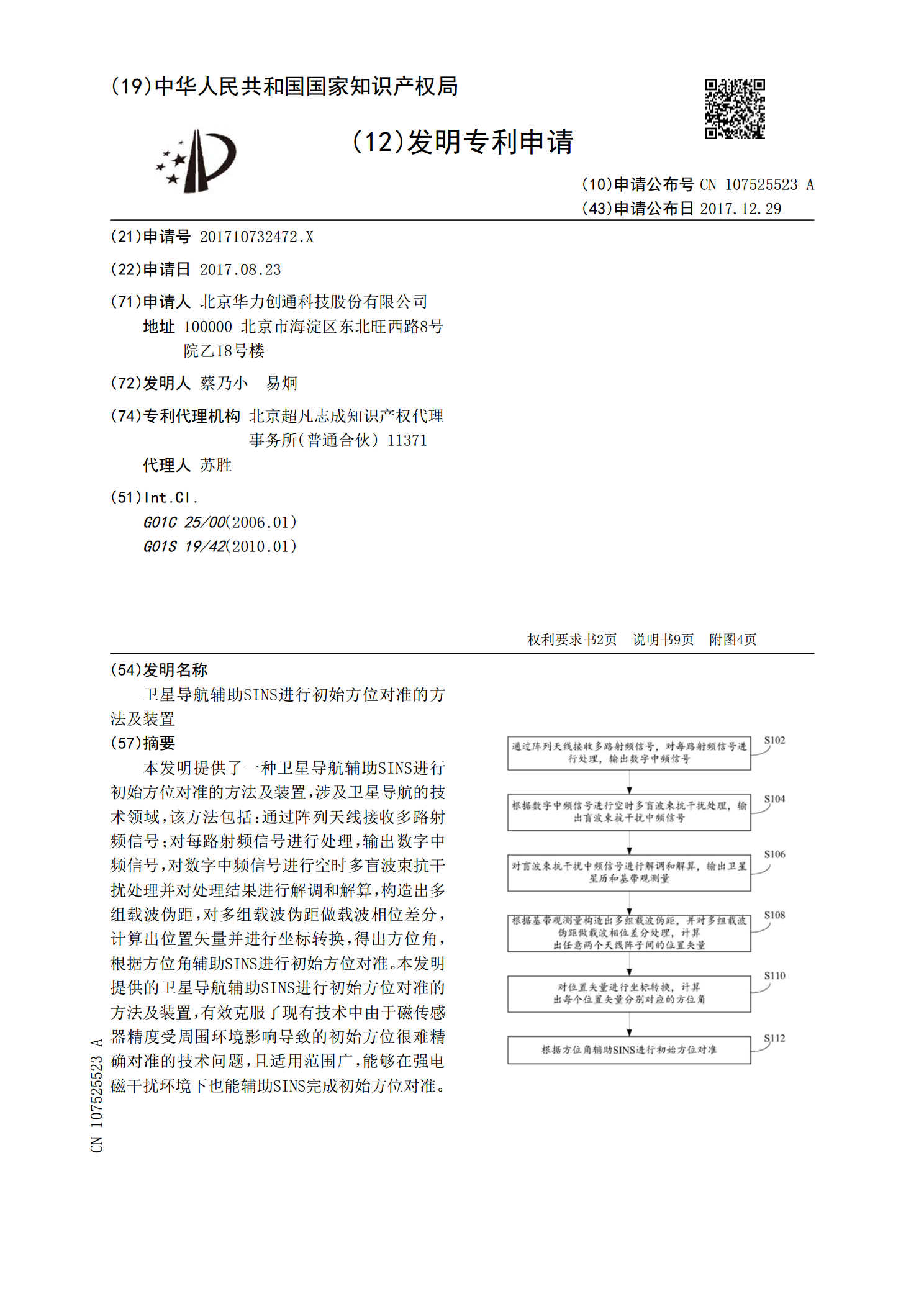
本发明提供了一种卫星导航辅助SINS进行初始方位对准的方法及装置,涉及卫星导航的技术领域,该方法包括:通过阵列天线接收多路射频信号;对每路射频信号进行处理,输出数字中频信号,对数字中频信号进行空时多盲波束抗干扰处理并对处理结果进行解调和解算,构造出多组载波伪距,对多组载波伪距做载波相位差分,计算出位置矢量并进行坐标转换,得出方位角,根据方位角辅助SINS进行初始方位对准。本发明提供的卫星导航辅助SINS进行初始方位对准的方法及装置,有效克服了现有技术中由于磁传感器精度受周围环境影响导致的初始方位很难精确对

利用相位信息进行图像匹配的研究.docx
利用相位信息进行图像匹配的研究相位信息是图像处理和计算机视觉领域中的重要概念,它可以用于图像匹配、分割、重建,甚至是对纹理和形状的识别。本文将介绍相位信息与图像匹配的关系,并分析现有的图像匹配方法,并讨论其适用范围,最后总结相位信息在图像匹配应用上的优势和局限性。一、相位信息简介在物理学中,相位表示的是波的状态和运动变化的规律,而在图像处理中,相位通常被描述为一个介于0和2π之间的角度值。相位包含了原始图像中的所有信息,无论是物体的形状、大小、结构,还是图像的纹理、颜色,都可以通过相位信息来表达和提取。具

SINS组合导航算法研究的开题报告.docx
空间激光通信中GPS/SINS组合导航算法研究的开题报告一、选题背景与意义空间激光通信技术是一种新型的无线通信技术,其具有高速、高精度、安全等优势,在航天、军事、商业等领域具有广泛的应用前景。但是在实际应用中,空间激光通信系统的导航问题一直是其关键技术之一。因此,在此背景下,开展空间激光通信中GPS/SINS组合导航算法研究,对于将其应用于实际生产中具有重要的意义。二、研究内容和方法1.研究内容(1)GPS/SINS组合导航的基本原理和算法;(2)空间激光通信系统和其导航问题的介绍;(3)基于GPS/SI

SINS组合导航算法研究的开题报告.docx
空间激光通信中GPS/SINS组合导航算法研究的开题报告一、选题背景与意义空间激光通信技术是一种新型的无线通信技术,其具有高速、高精度、安全等优势,在航天、军事、商业等领域具有广泛的应用前景。但是在实际应用中,空间激光通信系统的导航问题一直是其关键技术之一。因此,在此背景下,开展空间激光通信中GPS/SINS组合导航算法研究,对于将其应用于实际生产中具有重要的意义。二、研究内容和方法1.研究内容(1)GPS/SINS组合导航的基本原理和算法;(2)空间激光通信系统和其导航问题的介绍;(3)基于GPS/SI