
一种液压马达角速度伺服系统.pdf

一只****签网


1/7

2/7

3/7

4/7

5/7
6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种液压马达角速度伺服系统.pdf
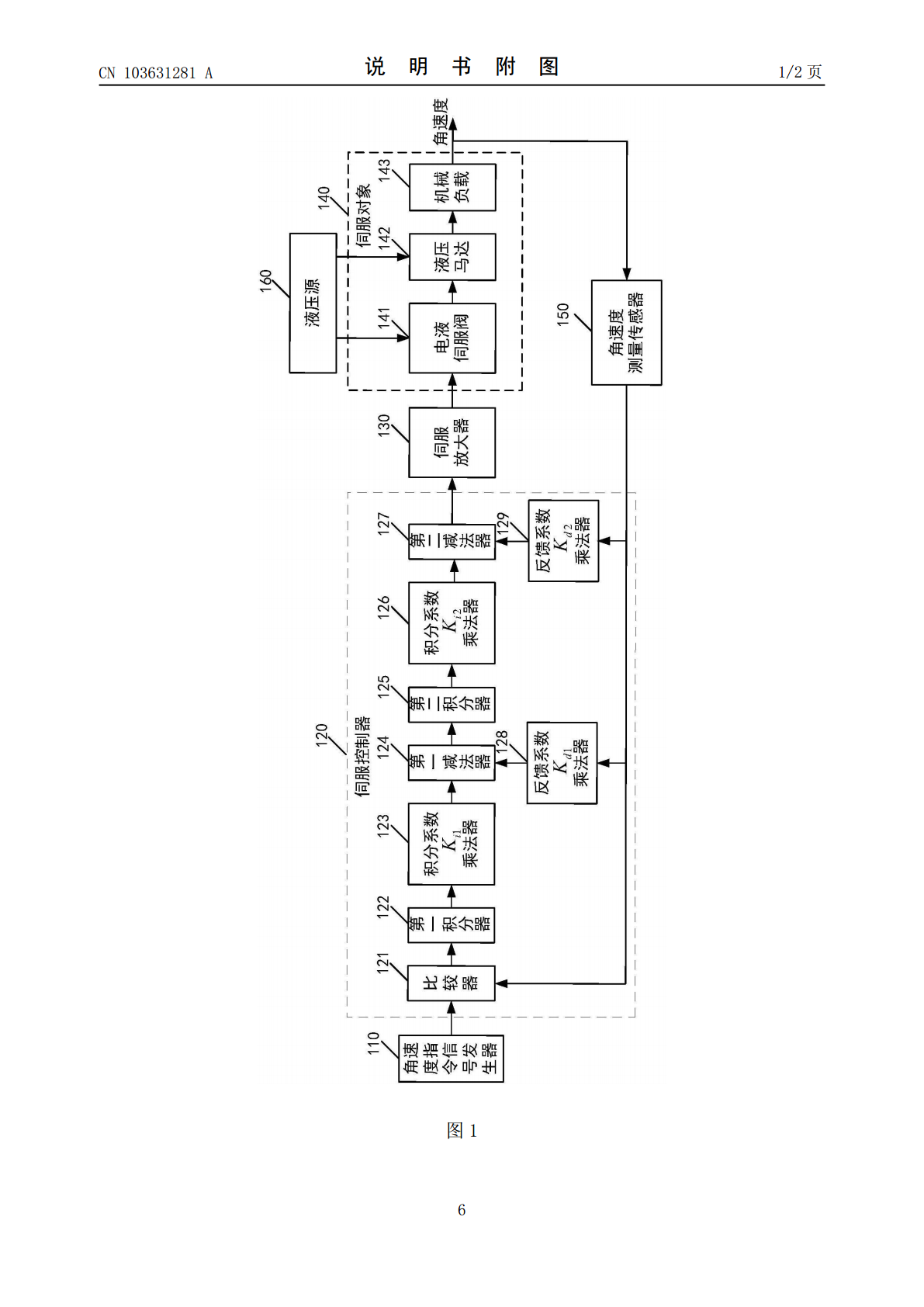
本发明公开了一种液压马达角速度伺服系统,该系统由角速度指令信号发生器、伺服控制器、伺服放大器、伺服对象、角速度测量传感器和液压源组成;其中所述伺服控制器由比较器、第一积分器、积分系数Ki1乘法器、第一减法器、第二积分器、积分系数Ki2乘法器、第二减法器、反馈系数Kd1乘法器和反馈系数Kd2乘法器组成,所述伺服对象由电液伺服阀、液压马达和机械负载组成。本发明控制参数的调整有计算公式可循,避免了参数调整的盲目性,节省时间,提高了系统的稳定性并避免了超调现象的出现。电液角速度伺服系统的静态和动态性能得到全面改善

液压马达伺服系统.pptx
《电液伺服与比例控制》第6讲液压马达伺服系统液压马达速度伺服系统是工程上常用的伺服控制系统,它具有响应速度快、功率/重量比大、负载刚性高和性能价格比高等特点,能实现高精度、高速度和大功率的控制,因此在航空航天、冶金、船舶、机床、动力设备和煤矿机械等工业领域得到了广泛采用,如用于飞机发动机转速模拟系统、大型雷达天线、火炮自动跟随系统、注塑机和油压机等。但随着使用要求的进一步提高,如高响应和高效率,在原来泵控马达速度伺服和阀控马达速度伺服系统的基础上,又出现了阀泵联合控制的马达速度伺服系统,这是液压马达速度伺

液压马达伺服系统课件教案.pptx
会计学第6讲液压马达伺服系统液压马达速度伺服系统是工程上常用的伺服控制系统,它具有响应速度快、功率/重量比大、负载刚性高和性能价格比高等特点,能实现高精度、高速度和大功率的控制,因此在航空航天、冶金、船舶、机床、动力设备和煤矿机械等工业领域得到了广泛采用,如用于飞机发动机转速模拟系统、大型雷达天线、火炮自动跟随系统、注塑机和油压机等。但随着使用要求的进一步提高,如高响应和高效率,在原来泵控马达速度伺服和阀控马达速度伺服系统的基础上,又出现了阀泵联合控制的马达速度伺服系统,这是液压马达速度伺服系统发展的一种

阀控液压马达速伺服系统仿真分析.docx
阀控液压马达速度伺服系统仿真分析引言阀控液压马达速度伺服系统的负载具有较大的惯性和很小的阻尼,其传递函数常可近似由一对实部为零的极点组成,并有很低的动态响应,由于负载处在系统的闭环之中,所以它对阀控液压马达的动态品质有很大的影响。此外,系统的负载常是可变的,系统设计只能针对一种特定负载,负载一旦改变,系统的动态品质就会变坏,有时甚至失去稳定性,严重的影响了伺服系统的跟踪性能。本文主要针对干扰力矩对系统的影响,利用结构不变性原理,消除干扰力矩对系统的影响,同时利用PID控制理论来提高系统的动态性能。1阀控液

双定子异形滑块液压马达角速度不均匀性研究.docx
双定子异形滑块液压马达角速度不均匀性研究双定子异形滑块液压马达角速度不均匀性研究摘要:双定子异形滑块液压马达在工程应用中起到至关重要的作用。然而,该类型液压马达在运转过程中常常出现角速度不均匀性的问题,这给系统的稳定性和效率带来了不利影响。本文通过理论分析和实验研究的方法,探究了双定子异形滑块液压马达角速度不均匀性的原因,并提出了相应的解决方案。研究结果表明,采用动态区域控制和合理设计滑块轮廓等措施可以有效降低双定子异形滑块液压马达的角速度不均匀性,提高其工作效率和稳定性。关键词:双定子异形滑块液压马达、