
程控分布式电机驱动的超声探测柱坐标扫描装置及其控制方法.pdf

小忆****ng


1/8

2/8

3/8
4/8
5/8
6/8

7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
程控分布式电机驱动的超声探测柱坐标扫描装置及其控制方法.pdf
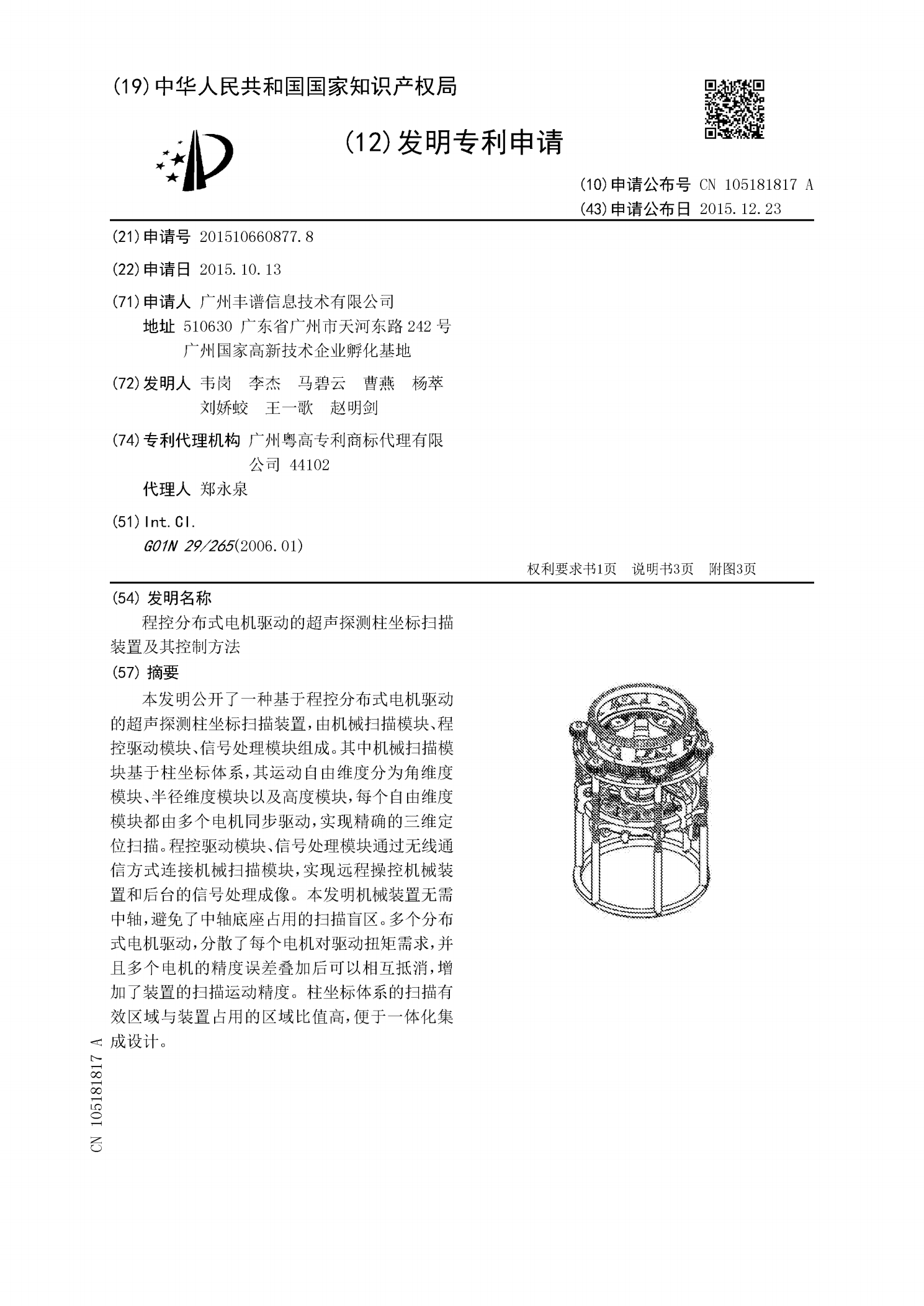
本发明公开了一种基于程控分布式电机驱动的超声探测柱坐标扫描装置,由机械扫描模块、程控驱动模块、信号处理模块组成。其中机械扫描模块基于柱坐标体系,其运动自由维度分为角维度模块、半径维度模块以及高度模块,每个自由维度模块都由多个电机同步驱动,实现精确的三维定位扫描。程控驱动模块、信号处理模块通过无线通信方式连接机械扫描模块,实现远程操控机械装置和后台的信号处理成像。本发明机械装置无需中轴,避免了中轴底座占用的扫描盲区。多个分布式电机驱动,分散了每个电机对驱动扭矩需求,并且多个电机的精度误差叠加后可以相互抵消,
电机驱动控制装置及电机驱动控制装置的控制方法.pdf
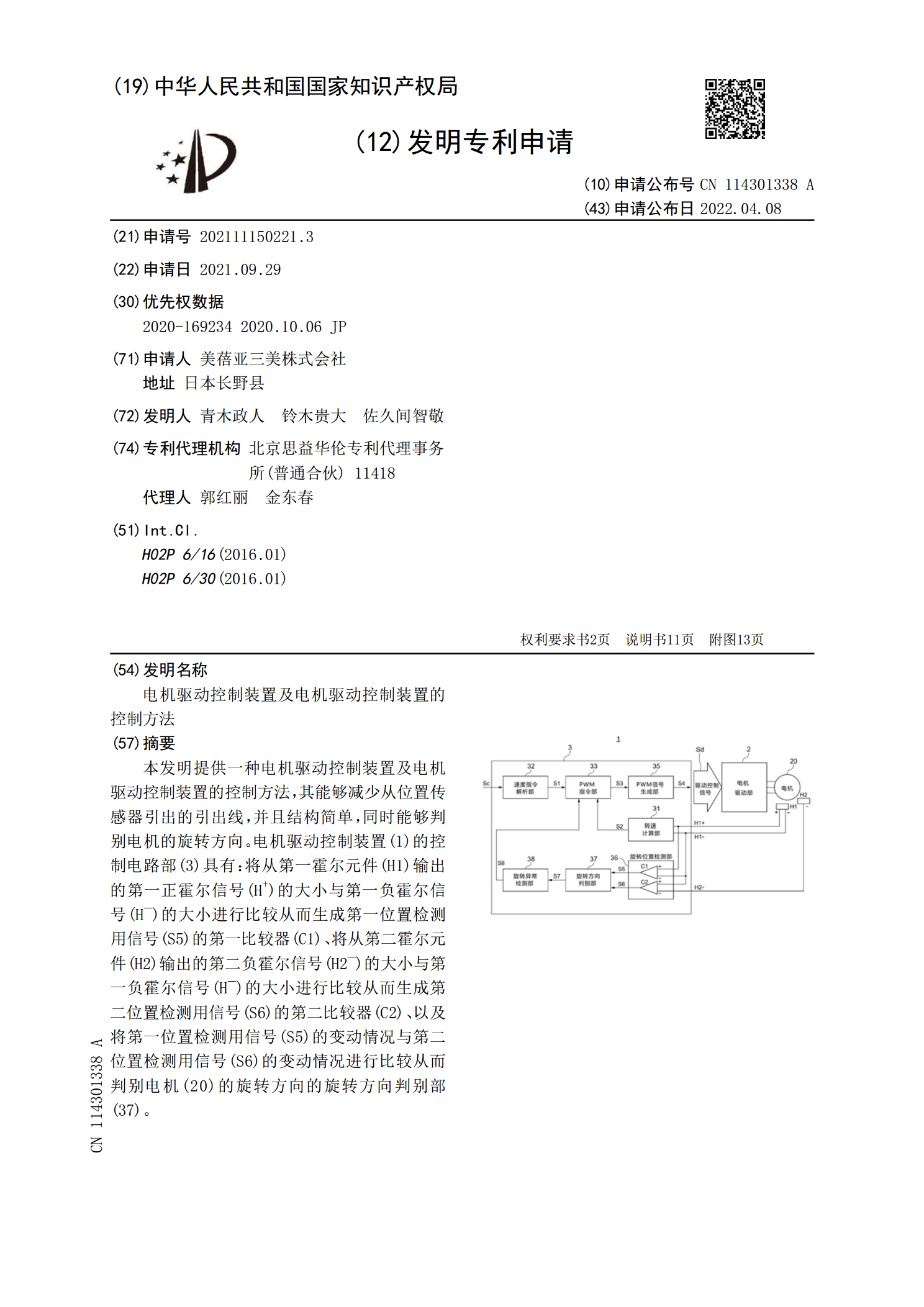
本发明提供一种电机驱动控制装置及电机驱动控制装置的控制方法,其能够减少从位置传感器引出的引出线,并且结构简单,同时能够判别电机的旋转方向。电机驱动控制装置(1)的控制电路部(3)具有:将从第一霍尔元件(H1)输出的第一正霍尔信号(H<base:Sup>+</base:Sup>)的大小与第一负霍尔信号(H<base:Sup>-</base:Sup>)的大小进行比较从而生成第一位置检测用信号(S5)的第一比较器(C1)、将从第二霍尔元件(H2)输出的第二负霍尔信号(H2<base:Sup>-</base:Su
电机驱动控制装置和电机驱动控制方法.pdf
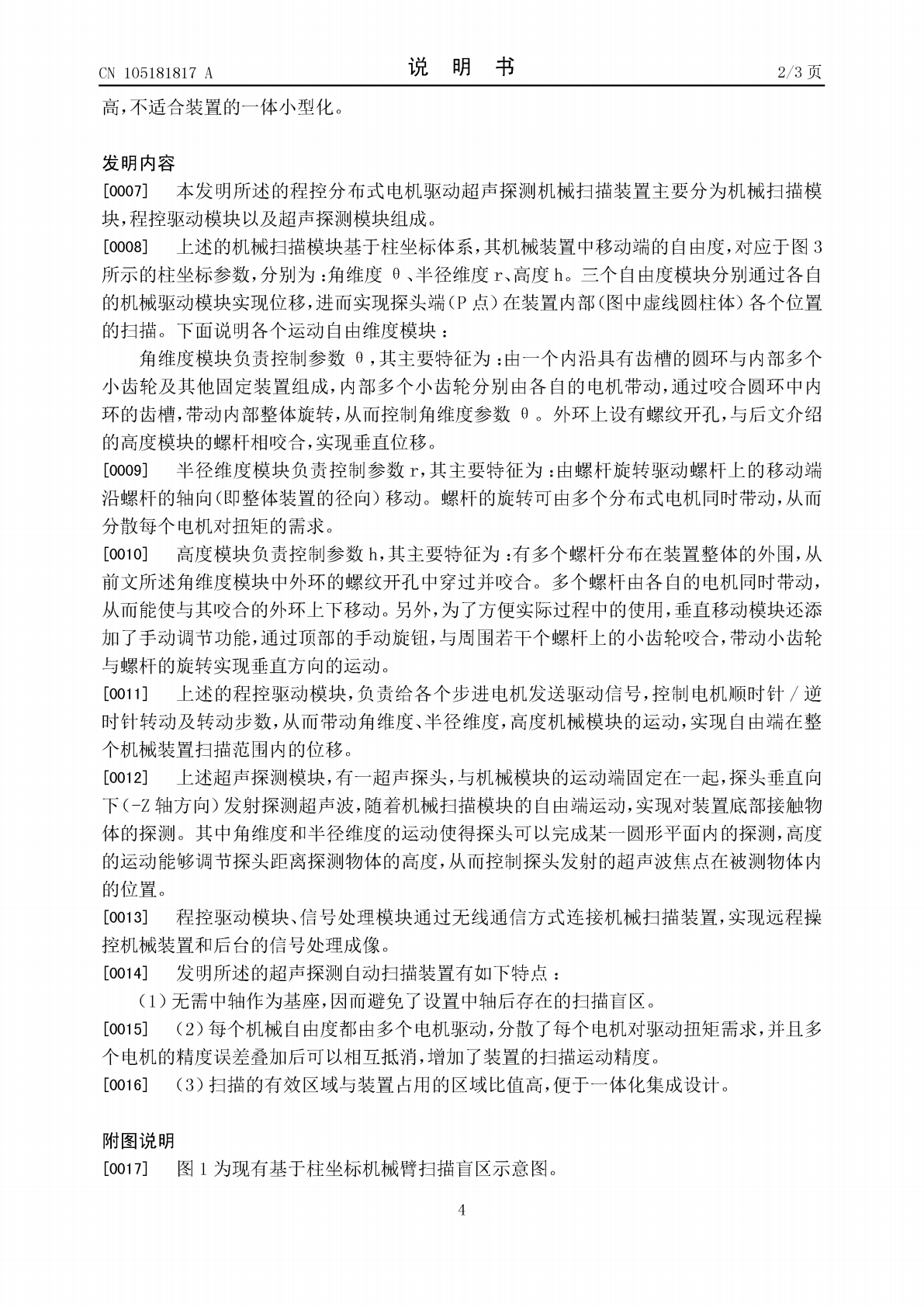
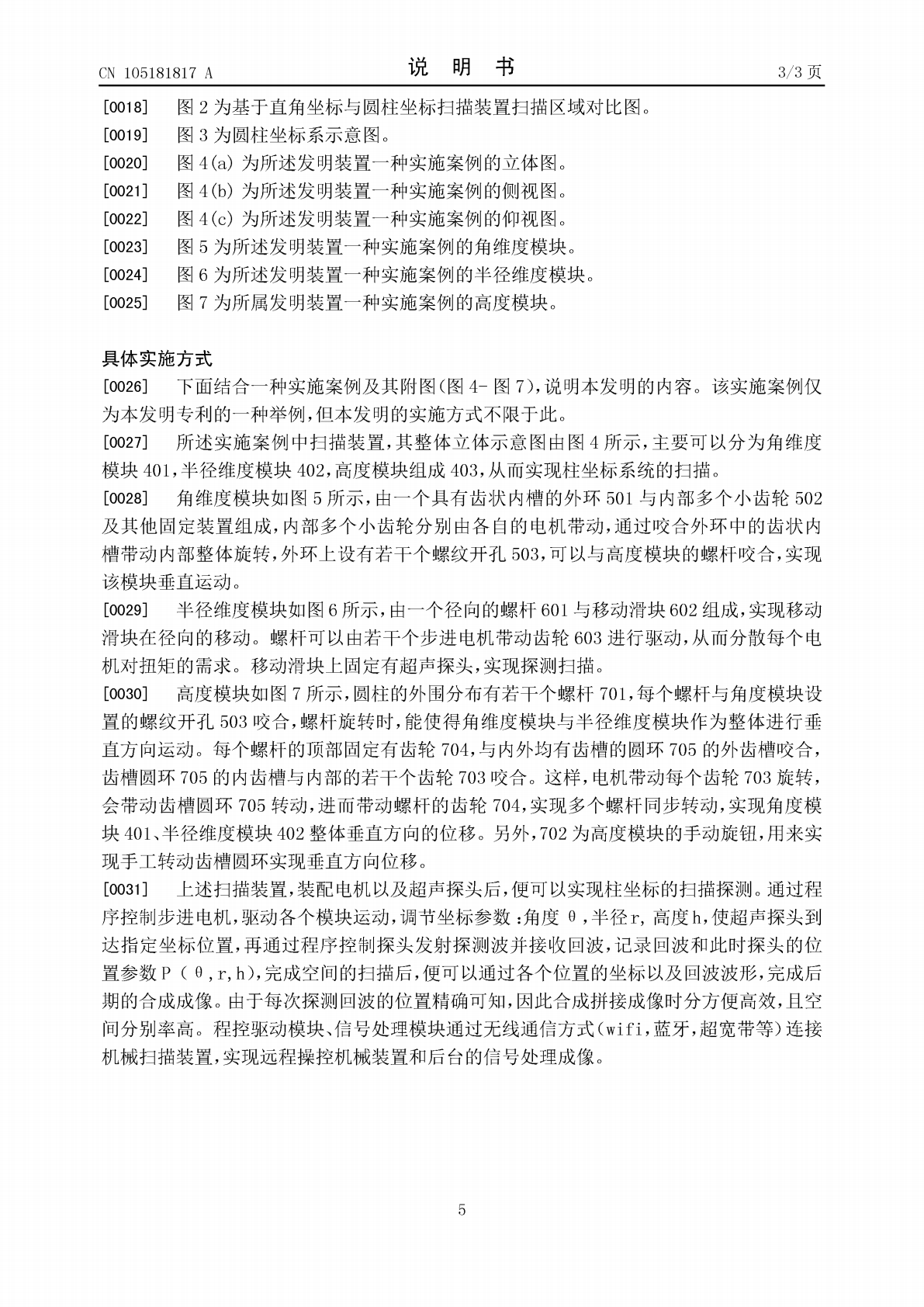
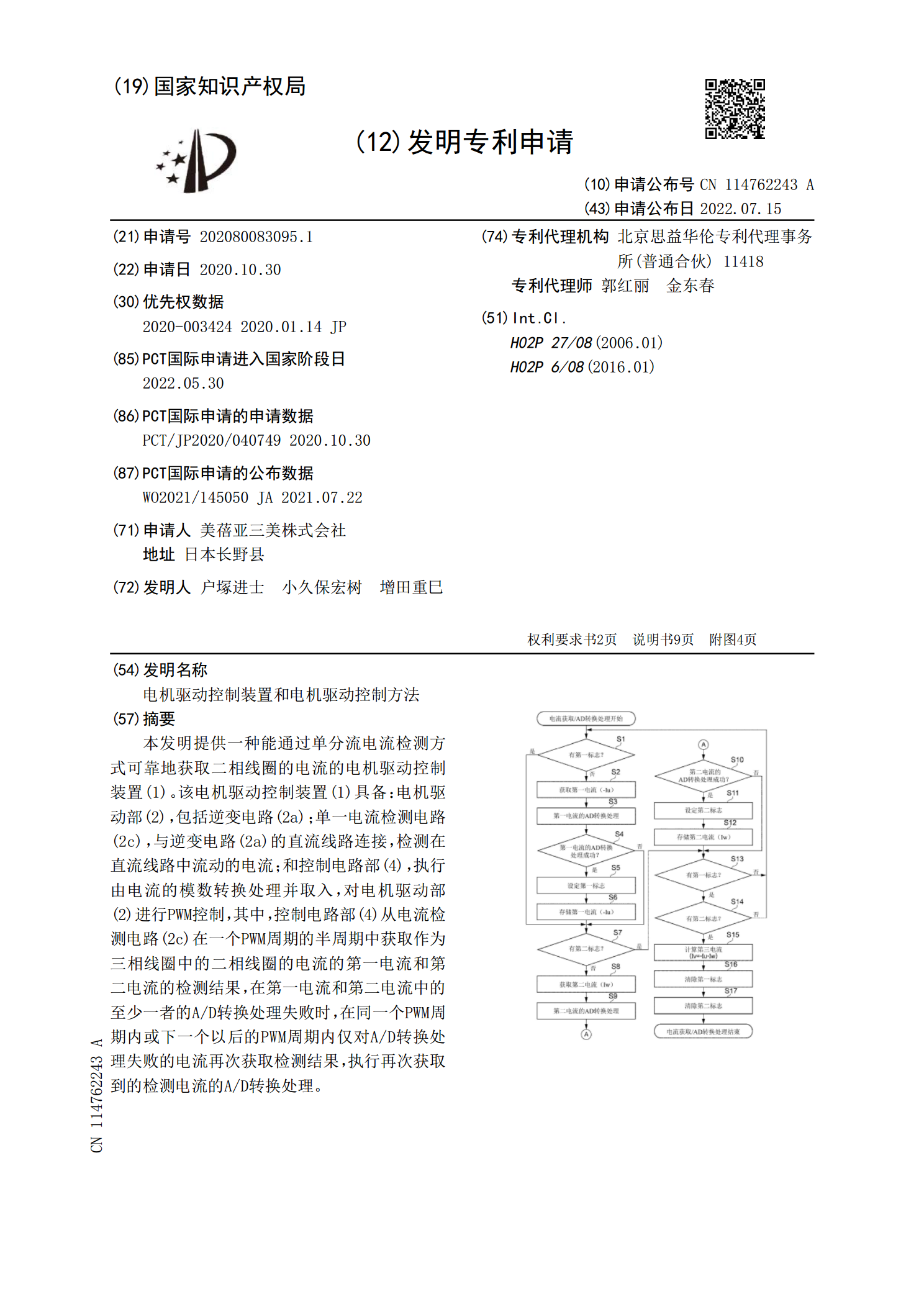
本发明提供一种能通过单分流电流检测方式可靠地获取二相线圈的电流的电机驱动控制装置(1)。该电机驱动控制装置(1)具备:电机驱动部(2),包括逆变电路(2a);单一电流检测电路(2c),与逆变电路(2a)的直流线路连接,检测在直流线路中流动的电流;和控制电路部(4),执行由电流的模数转换处理并取入,对电机驱动部(2)进行PWM控制,其中,控制电路部(4)从电流检测电路(2c)在一个PWM周期的半周期中获取作为三相线圈中的二相线圈的电流的第一电流和第二电流的检测结果,在第一电流和第二电流中的至少一者的A/D转
电机驱动控制装置、电机单元以及电机驱动控制方法.pdf
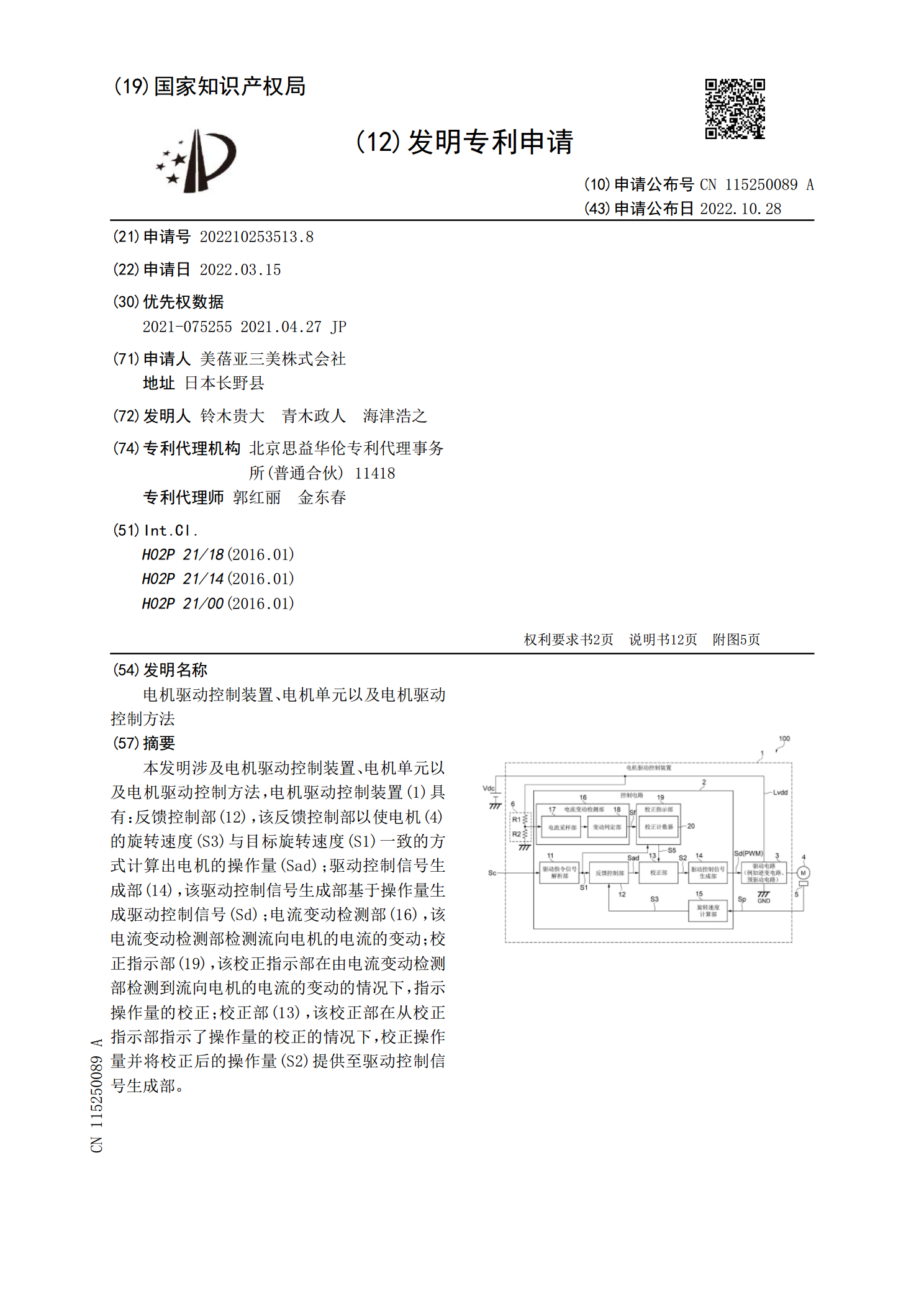
本发明涉及电机驱动控制装置、电机单元以及电机驱动控制方法,电机驱动控制装置(1)具有:反馈控制部(12),该反馈控制部以使电机(4)的旋转速度(S3)与目标旋转速度(S1)一致的方式计算出电机的操作量(Sad);驱动控制信号生成部(14),该驱动控制信号生成部基于操作量生成驱动控制信号(Sd);电流变动检测部(16),该电流变动检测部检测流向电机的电流的变动;校正指示部(19),该校正指示部在由电流变动检测部检测到流向电机的电流的变动的情况下,指示操作量的校正;校正部(13),该校正部在从校正指示部指示了

单相驱动短柱超声电机及其在机器人关节驱动中的应用的开题报告.docx
单相驱动短柱超声电机及其在机器人关节驱动中的应用的开题报告开题报告题目:单相驱动短柱超声电机及其在机器人关节驱动中的应用学科领域:机械设计及制造工程研究方向:超声电机、机器人驱动研究背景:现代机器人越来越受到人们的重视和青睐,而机器人的驱动方式也多种多样。其中,超声电机是一种新型的驱动方式。与传统的电机相比,超声电机具有体积小、功率大、响应快、转速高等特点,尤其是在某些对电机体积和重量要求极高的机器人关节驱动中,应用前景非常广阔。然而,在超声电机领域中,目前大多数研究都是基于三相电机的,而单相驱动的短柱型