
基于遗传蚁群算法的移动机器人路径规划方法及系统.pdf

Jo****34

1/10
2/10
3/10
4/10

5/10
6/10
7/10
8/10
9/10

10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于遗传蚁群算法的路径规划方法及系统.pdf
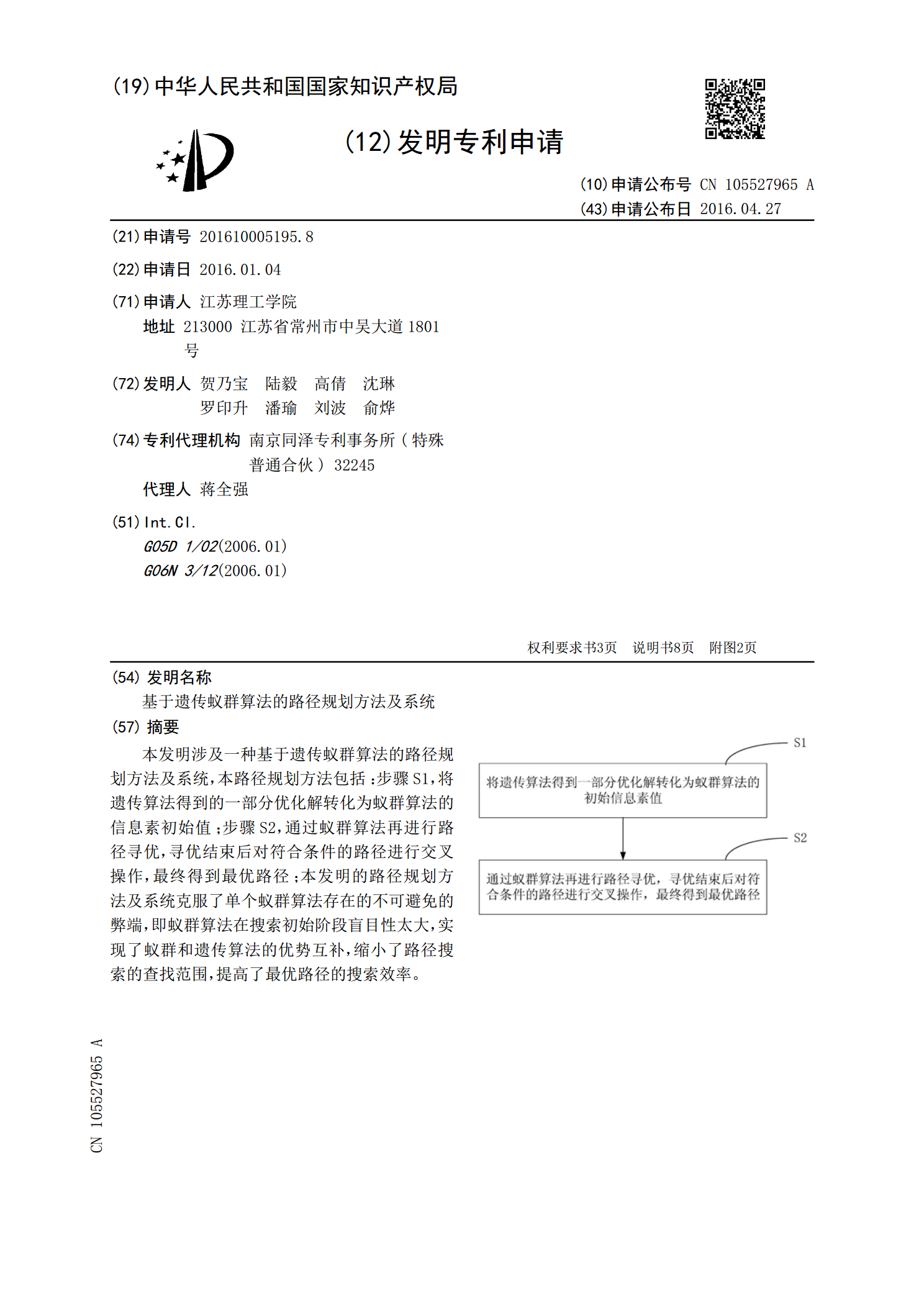
本发明涉及一种基于遗传蚁群算法的路径规划方法及系统,本路径规划方法包括:步骤S1,将遗传算法得到的一部分优化解转化为蚁群算法的信息素初始值;步骤S2,通过蚁群算法再进行路径寻优,寻优结束后对符合条件的路径进行交叉操作,最终得到最优路径;本发明的路径规划方法及系统克服了单个蚁群算法存在的不可避免的弊端,即蚁群算法在搜索初始阶段盲目性太大,实现了蚁群和遗传算法的优势互补,缩小了路径搜索的查找范围,提高了最优路径的搜索效率。
基于遗传蚁群算法的移动机器人路径规划方法及系统.pdf
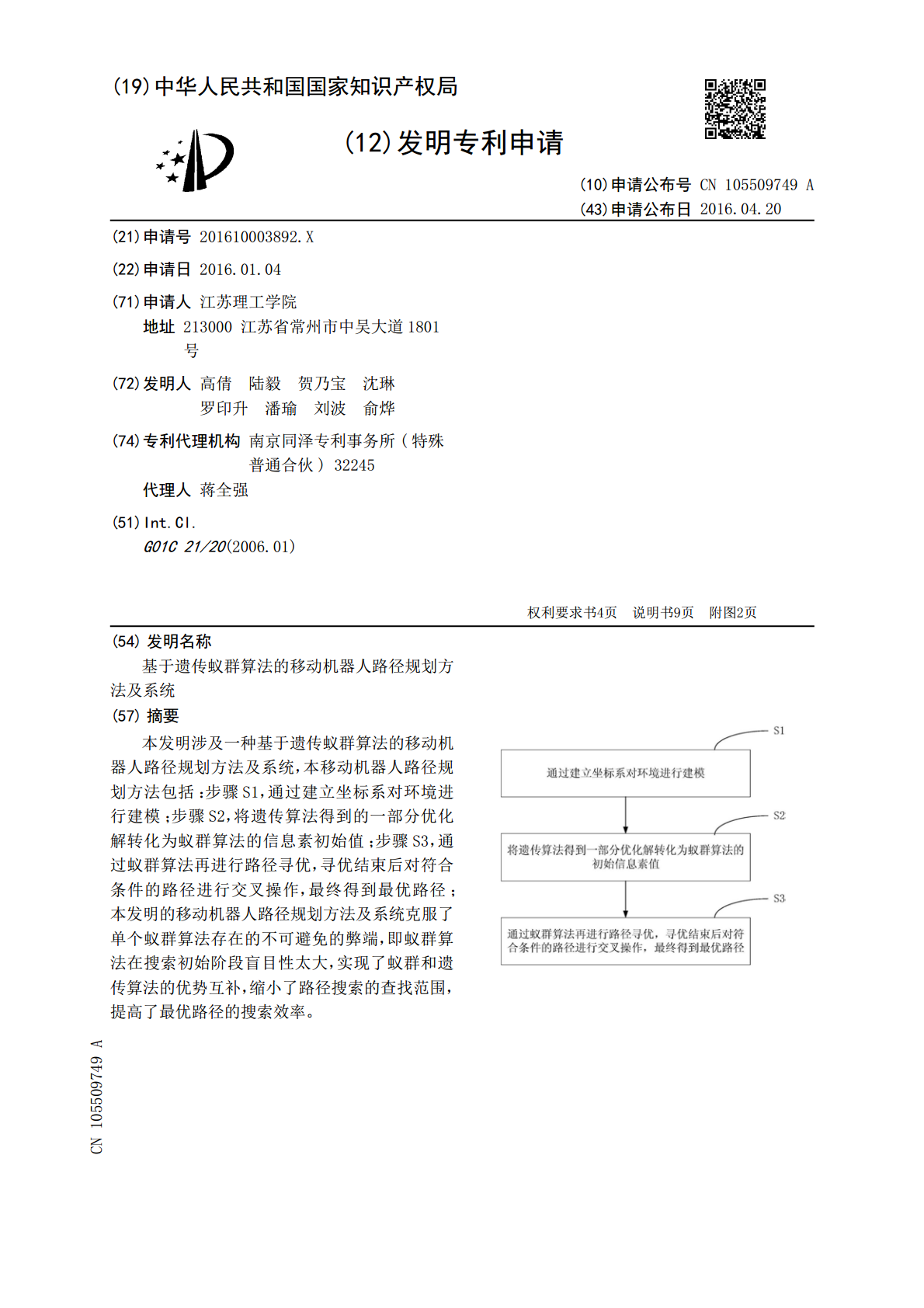
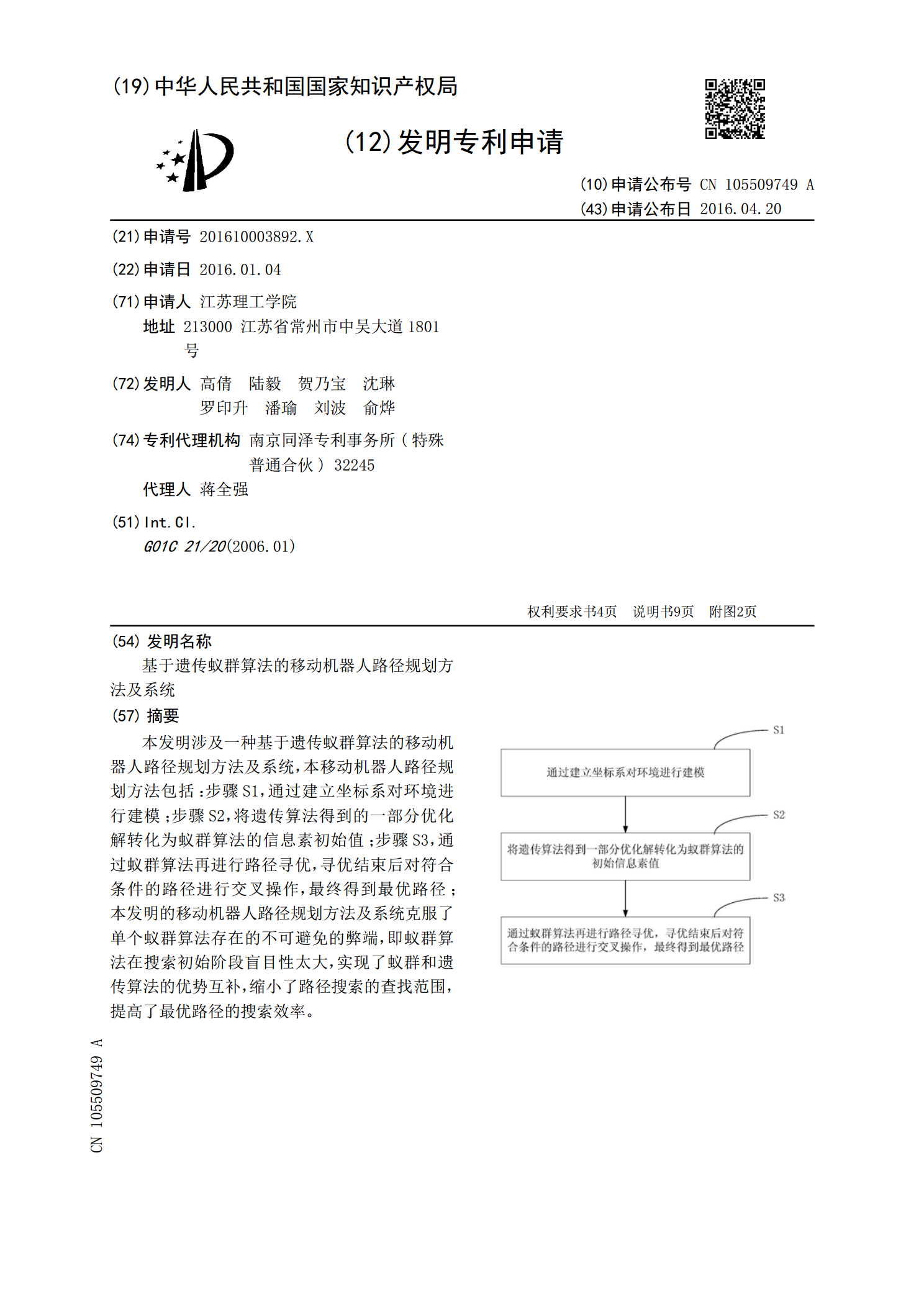
本发明涉及一种基于遗传蚁群算法的移动机器人路径规划方法及系统,本移动机器人路径规划方法包括:步骤S1,通过建立坐标系对环境进行建模;步骤S2,将遗传算法得到的一部分优化解转化为蚁群算法的信息素初始值;步骤S3,通过蚁群算法再进行路径寻优,寻优结束后对符合条件的路径进行交叉操作,最终得到最优路径;本发明的移动机器人路径规划方法及系统克服了单个蚁群算法存在的不可避免的弊端,即蚁群算法在搜索初始阶段盲目性太大,实现了蚁群和遗传算法的优势互补,缩小了路径搜索的查找范围,提高了最优路径的搜索效率。
基于改进蚁群算法的移动机器人路径规划方法.pdf
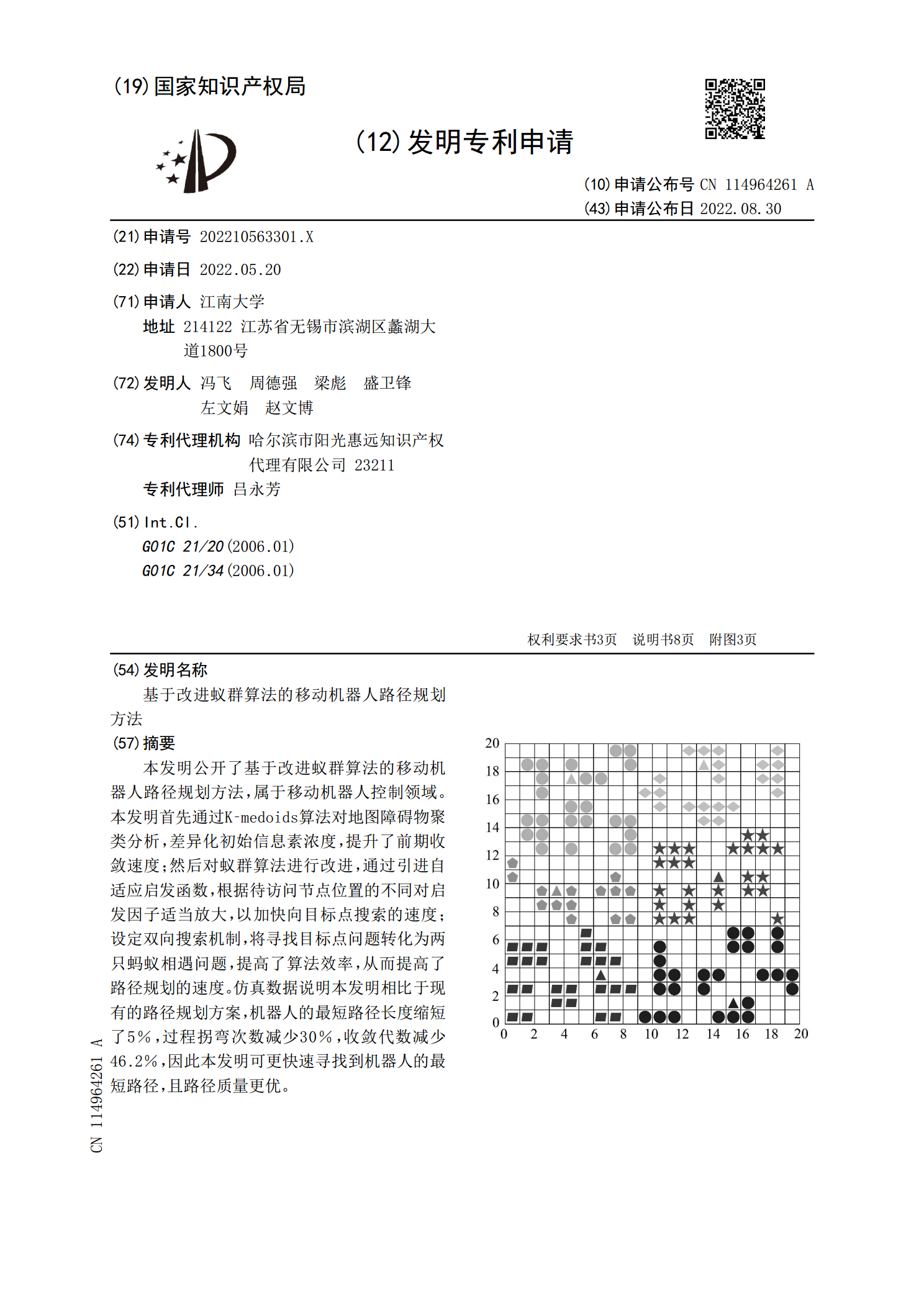
本发明公开了基于改进蚁群算法的移动机器人路径规划方法,属于移动机器人控制领域。本发明首先通过K‑medoids算法对地图障碍物聚类分析,差异化初始信息素浓度,提升了前期收敛速度;然后对蚁群算法进行改进,通过引进自适应启发函数,根据待访问节点位置的不同对启发因子适当放大,以加快向目标点搜索的速度;设定双向搜索机制,将寻找目标点问题转化为两只蚂蚁相遇问题,提高了算法效率,从而提高了路径规划的速度。仿真数据说明本发明相比于现有的路径规划方案,机器人的最短路径长度缩短了5%,过程拐弯次数减少30%,收敛代数减少4

基于蚁群算法的路径规划.doc
(完整word版)基于蚁群算法的路径规划(完整word版)基于蚁群算法的路径规划(完整word版)基于蚁群算法的路径规划MATLAB实现基于蚁群算法的机器人路径规划问题描述移动机器人路径规划是机器人学的一个重要研究领域。它要求机器人依据某个或某些优化原则(如最小能量消耗,最短行走路线,最短行走时间等),在其工作空间中找到一条从起始状态到目标状态的能避开障碍物的最优路径.机器人路径规划问题可以建模为一个有约束的优化问题,都要完成路径规划、定位和避障等任务。2算法理论蚁群算法(AntColonyAlgorit

基于改进蚁群算法的移动机器人动态路径规划方法.docx
基于改进蚁群算法的移动机器人动态路径规划方法随着机器人技术的不断发展和应用,移动机器人动态路径规划问题也越来越受到关注。在实际生产和工作中,移动机器人需要快速、准确地规划出动态环境下的最优路径,以便更好地完成任务。因此,本文提出了一种基于改进蚁群算法的移动机器人动态路径规划方法。一、研究背景在移动机器人的应用中,路径规划是一个至关重要的问题。传统的路径规划算法主要以静态环境为前提,无法很好地适应动态环境下机器人的规划需求。因此,针对动态环境下路径规划问题,需要提出一种新的方法。蚁群算法(AntColony