
基于蚁群算法的路径规划.doc

黛娥****ak


1/9

2/9

3/9

4/9

5/9

6/9

7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于蚁群算法的路径规划.doc
(完整word版)基于蚁群算法的路径规划(完整word版)基于蚁群算法的路径规划(完整word版)基于蚁群算法的路径规划MATLAB实现基于蚁群算法的机器人路径规划问题描述移动机器人路径规划是机器人学的一个重要研究领域。它要求机器人依据某个或某些优化原则(如最小能量消耗,最短行走路线,最短行走时间等),在其工作空间中找到一条从起始状态到目标状态的能避开障碍物的最优路径.机器人路径规划问题可以建模为一个有约束的优化问题,都要完成路径规划、定位和避障等任务。2算法理论蚁群算法(AntColonyAlgorit

基于蚁群算法的配送路径规划研究.docx
基于蚁群算法的配送路径规划研究基于蚁群算法的配送路径规划研究摘要:蚁群算法是一种模拟蚁群寻找食物路径的启发式算法,可用于解决优化问题。本论文通过研究基于蚁群算法的配送路径规划问题,探讨了蚁群算法在解决此类问题中的优势和不足,并提出了一种改进的蚁群算法模型。关键词:蚁群算法、配送路径规划、优化、启发式算法1.引言配送路径规划是一种典型的优化问题,目标是找到最优的路径方案,以最小化整体配送成本和时间。传统的路径规划方法面临着计算复杂度高、求解效率低等问题。蚁群算法作为一种启发式算法,具有自组织、自适应、并行性

基于改进蚁群算法的越野路径规划.docx
基于改进蚁群算法的越野路径规划摘要:越野路径规划是一项在复杂地形下规划路径的重要任务,它发挥着重要的应用价值。蚁群算法是一种组合优化算法,具有全局搜索能力和自适应性,被广泛应用于越野路径规划中。本文针对传统蚁群算法的缺陷,提出了改进蚁群算法,包括蚁群路线更新策略和局部搜索策略。在地形复杂的仿真环境下进行测试,结果表明改进蚁群算法能够更快、更准确地规划出越野车的路径。关键词:越野路径规划;蚁群算法;路线更新策略;局部搜索策略1.引言越野车在拓荒、考古、救援等领域有着重要的应用价值。但是,越野车在复杂地形下行
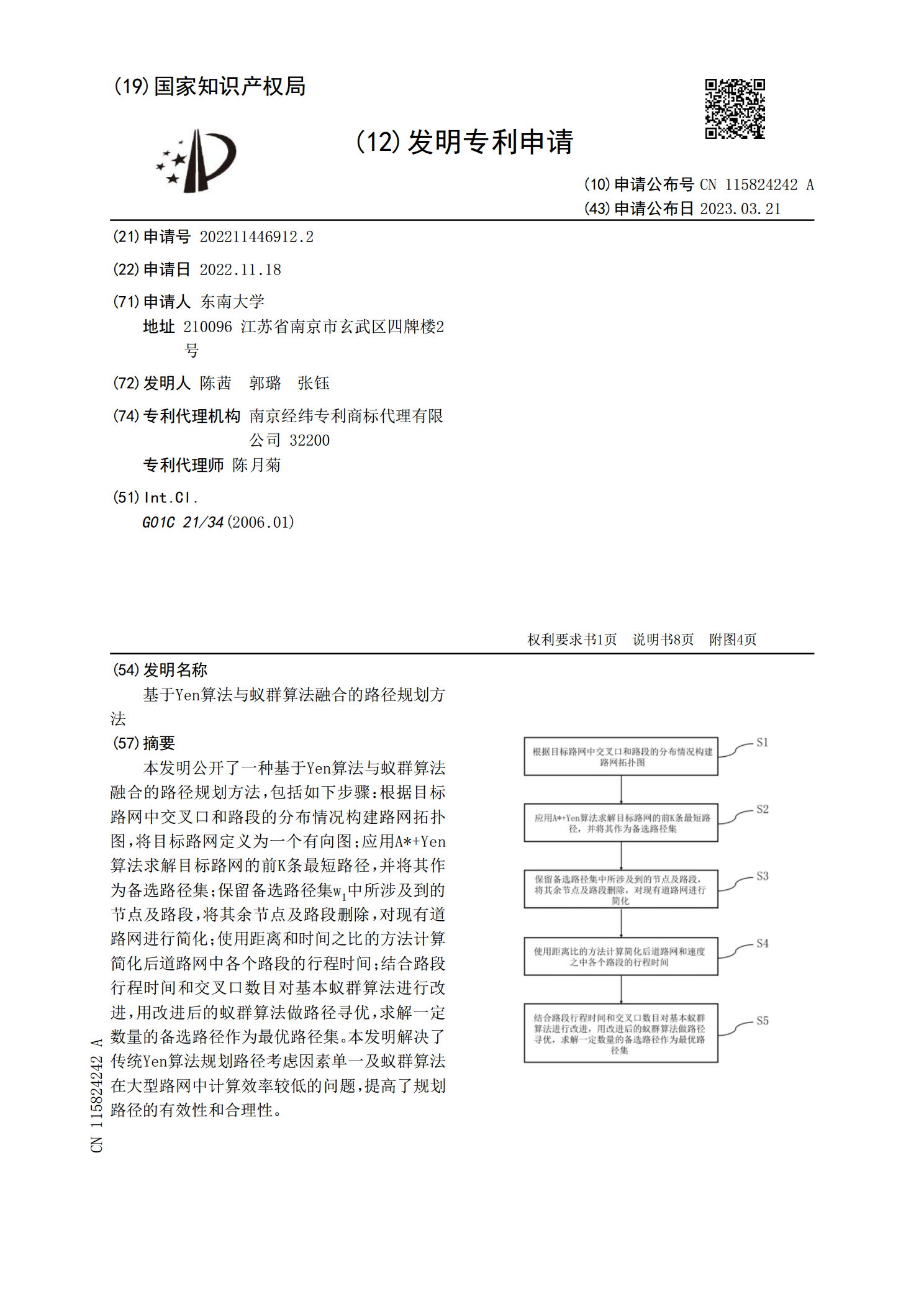
基于Yen算法与蚁群算法融合的路径规划方法.pdf
本发明公开了一种基于Yen算法与蚁群算法融合的路径规划方法,包括如下步骤:根据目标路网中交叉口和路段的分布情况构建路网拓扑图,将目标路网定义为一个有向图;应用A*+Yen算法求解目标路网的前K条最短路径,并将其作为备选路径集;保留备选路径集w
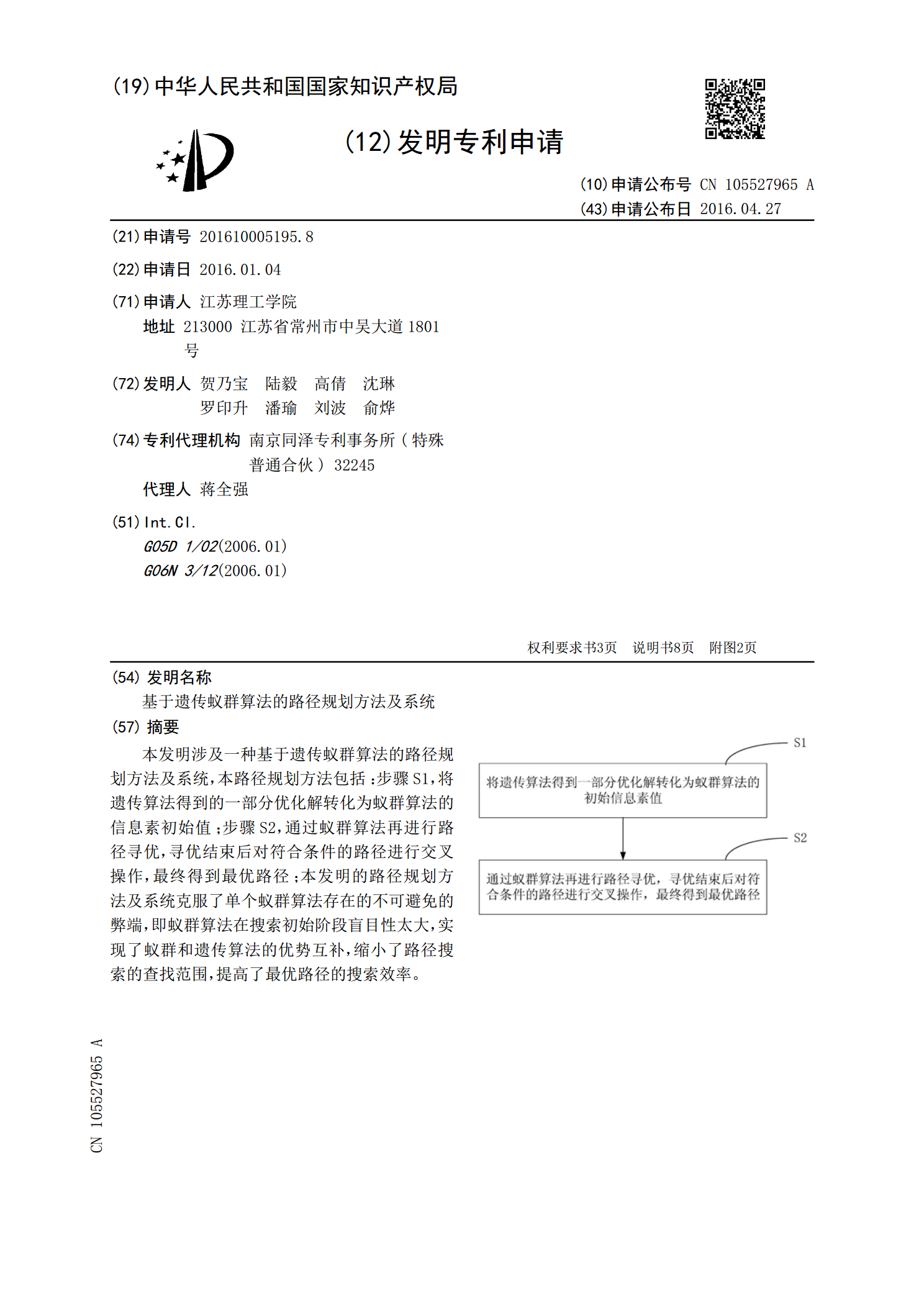
基于遗传蚁群算法的路径规划方法及系统.pdf
本发明涉及一种基于遗传蚁群算法的路径规划方法及系统,本路径规划方法包括:步骤S1,将遗传算法得到的一部分优化解转化为蚁群算法的信息素初始值;步骤S2,通过蚁群算法再进行路径寻优,寻优结束后对符合条件的路径进行交叉操作,最终得到最优路径;本发明的路径规划方法及系统克服了单个蚁群算法存在的不可避免的弊端,即蚁群算法在搜索初始阶段盲目性太大,实现了蚁群和遗传算法的优势互补,缩小了路径搜索的查找范围,提高了最优路径的搜索效率。