
一种连续波雷达目标加速度盲估计方法.pdf

努力****采萍

1/7

2/7

3/7

4/7

5/7
6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种连续波雷达目标加速度盲估计方法.pdf
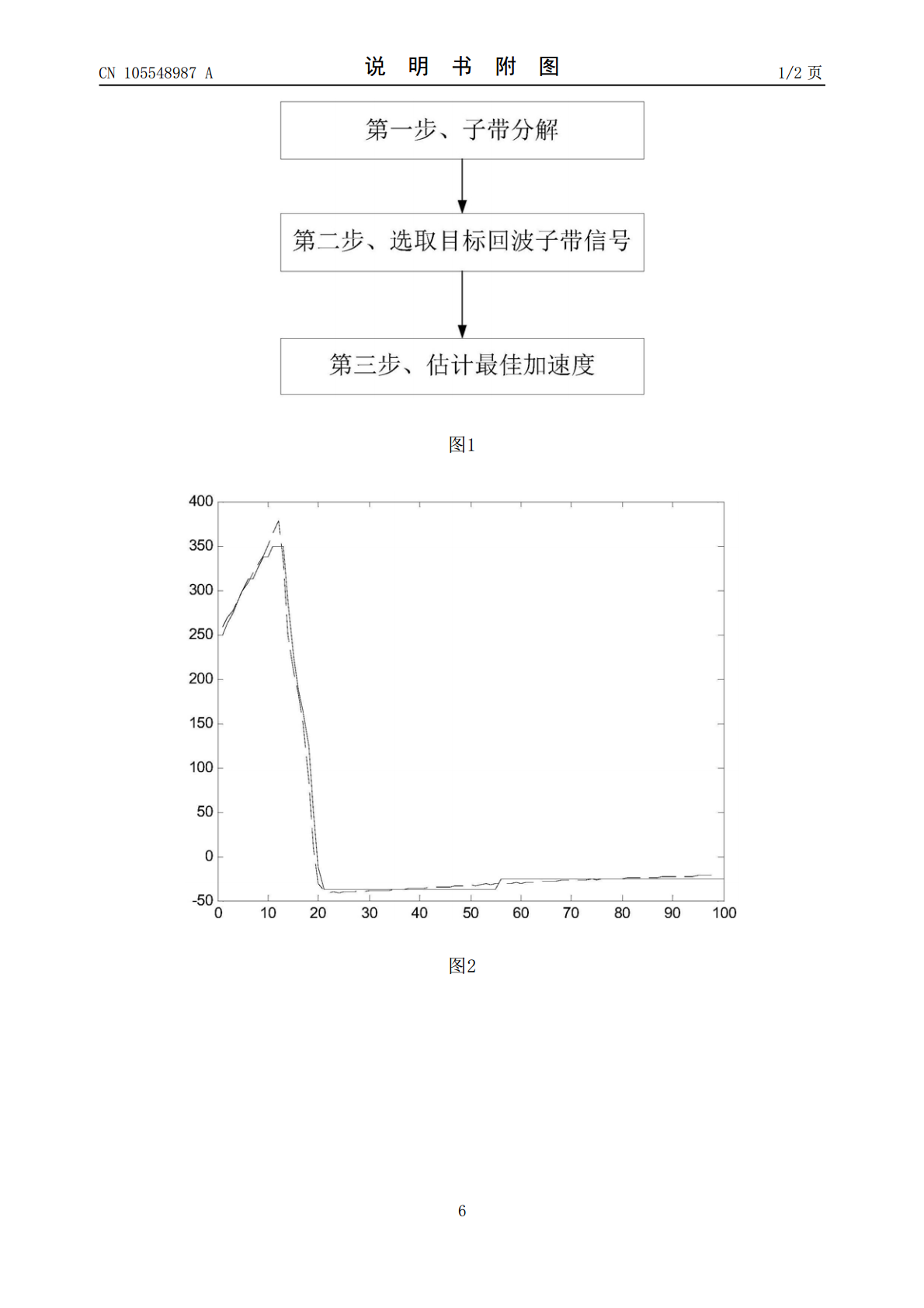
本发明提供一种连续波雷达目标加速度盲估计方法。技术方案包括以下三步:第一步、子带分解。把连续波雷达任意一个测量周期内多普勒回波信号的离散采样序列分成若干路子带信号;第二步、选取目标回波子带信号。选取子带信号的平方和最大的一路作为目标回波子带信号。第三步、估计最佳加速度。利用目标回波子带信号估算加速度。本发明的计算量小,实时性强。

连续波雷达加速度和速度估计方法研究.docx
连续波雷达加速度和速度估计方法研究标题:连续波雷达加速度和速度估计方法研究摘要:连续波雷达广泛应用于车辆、船舶或飞机等移动目标的跟踪与测量。其中,加速度和速度估计作为连续波雷达性能的重要指标,对于目标跟踪和运动状态探测具有重要意义。本文主要研究了连续波雷达加速度和速度估计的相关方法,包括基于多普勒频移的方法、基于相位差测量的方法以及基于多目标跟踪的方法。通过对这些方法的分析和比较,为进一步提高连续波雷达的加速度和速度估计性能提供了参考。1.引言连续波雷达作为一种主要的雷达测量技术,具有快速测量、较高精度和

一种基于数据点合并的调频连续波雷达目标参数估计方法.pdf
本发明提供了一种基于数据点合并的调频连续波雷达目标参数估计方法。其输入是回波信号三维特征数据点的栅格坐标值,输出是估计到的各目标的栅格坐标值。输出栅格坐标值所对应的距离,速度和方位即为目标参数估计值。根据数据点产生机理,本发明把相邻数据点合并为一个目标点,合并处理后的结果可以作为下一轮合并处理的输入数据进行再次合并。本发明能够区分参数间距很小的目标,从而正确判定目标数目并提高距离,速度和方位的估计精度。
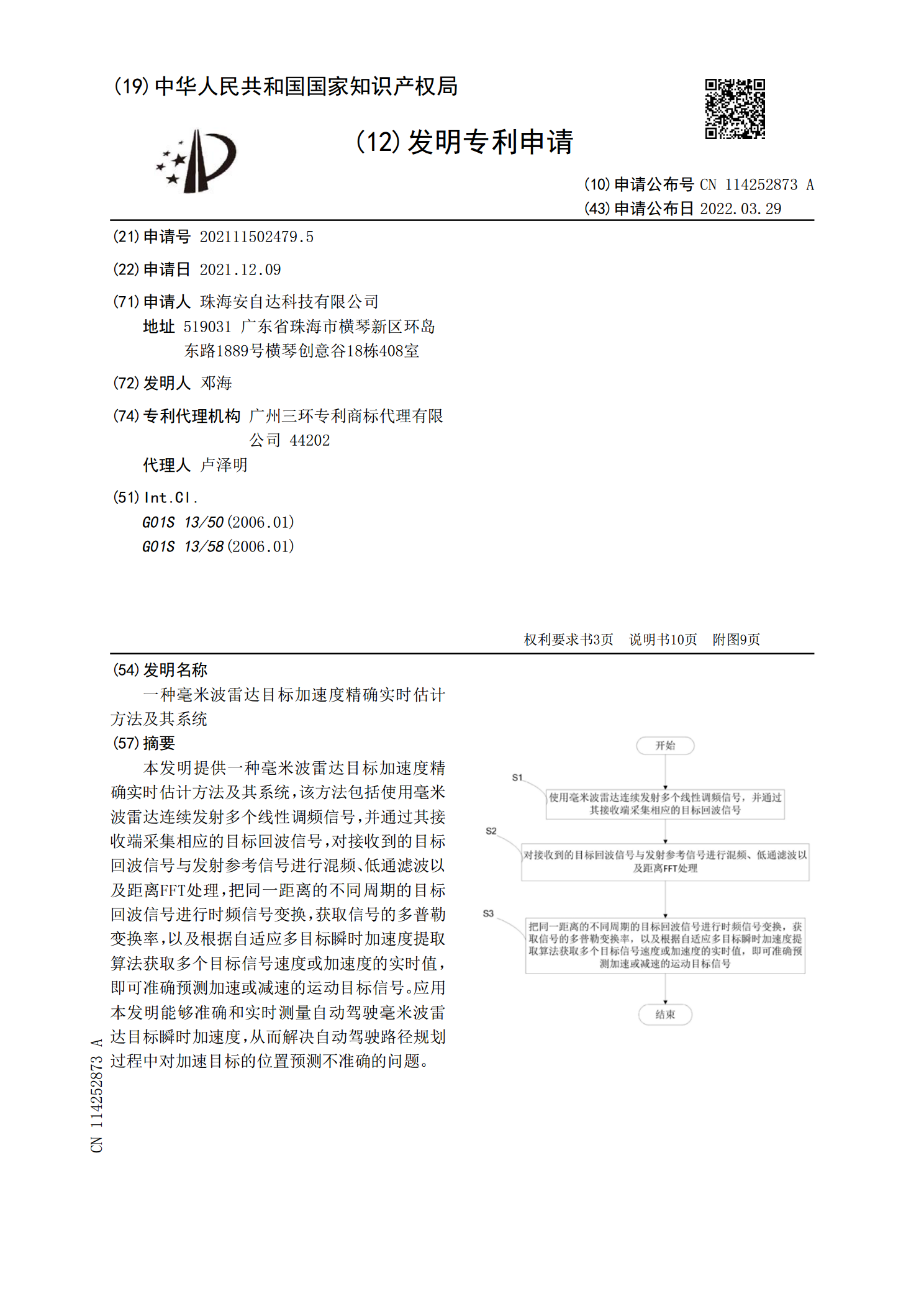
一种毫米波雷达目标加速度精确实时估计方法及其系统.pdf
本发明提供一种毫米波雷达目标加速度精确实时估计方法及其系统,该方法包括使用毫米波雷达连续发射多个线性调频信号,并通过其接收端采集相应的目标回波信号,对接收到的目标回波信号与发射参考信号进行混频、低通滤波以及距离FFT处理,把同一距离的不同周期的目标回波信号进行时频信号变换,获取信号的多普勒变换率,以及根据自适应多目标瞬时加速度提取算法获取多个目标信号速度或加速度的实时值,即可准确预测加速或减速的运动目标信号。应用本发明能够准确和实时测量自动驾驶毫米波雷达目标瞬时加速度,从而解决自动驾驶路径规划过程中对加速
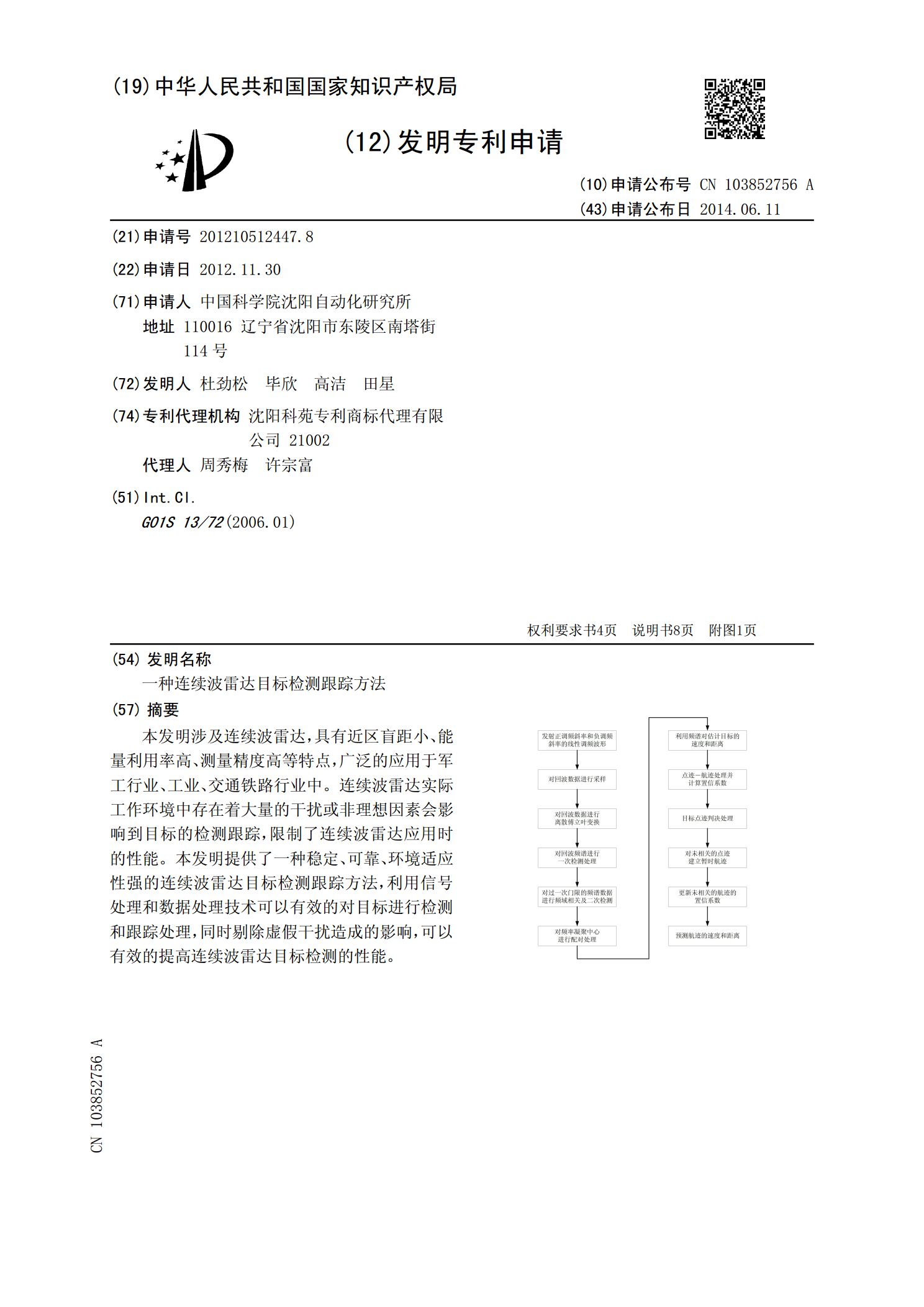
一种连续波雷达目标检测跟踪方法.pdf
本发明涉及连续波雷达,具有近区盲距小、能量利用率高、测量精度高等特点,广泛的应用于军工行业、工业、交通铁路行业中。连续波雷达实际工作环境中存在着大量的干扰或非理想因素会影响到目标的检测跟踪,限制了连续波雷达应用时的性能。本发明提供了一种稳定、可靠、环境适应性强的连续波雷达目标检测跟踪方法,利用信号处理和数据处理技术可以有效的对目标进行检测和跟踪处理,同时剔除虚假干扰造成的影响,可以有效的提高连续波雷达目标检测的性能。