
一种智能导盲眼镜系统及其导盲方法.pdf

韶敏****ab


1/10

2/10
3/10

4/10
5/10

6/10

7/10
8/10

9/10

10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种智能导盲眼镜系统及其导盲方法.pdf
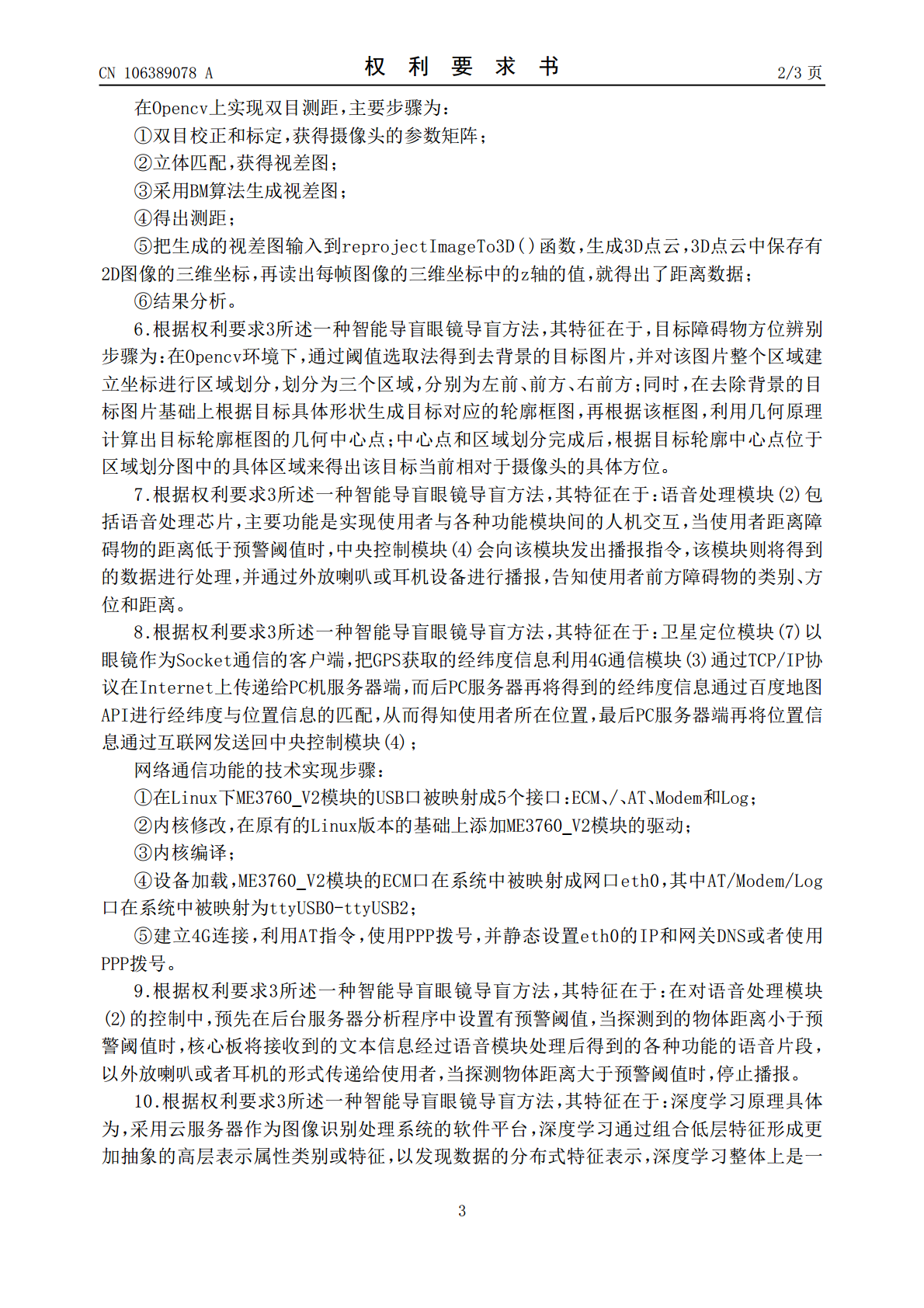
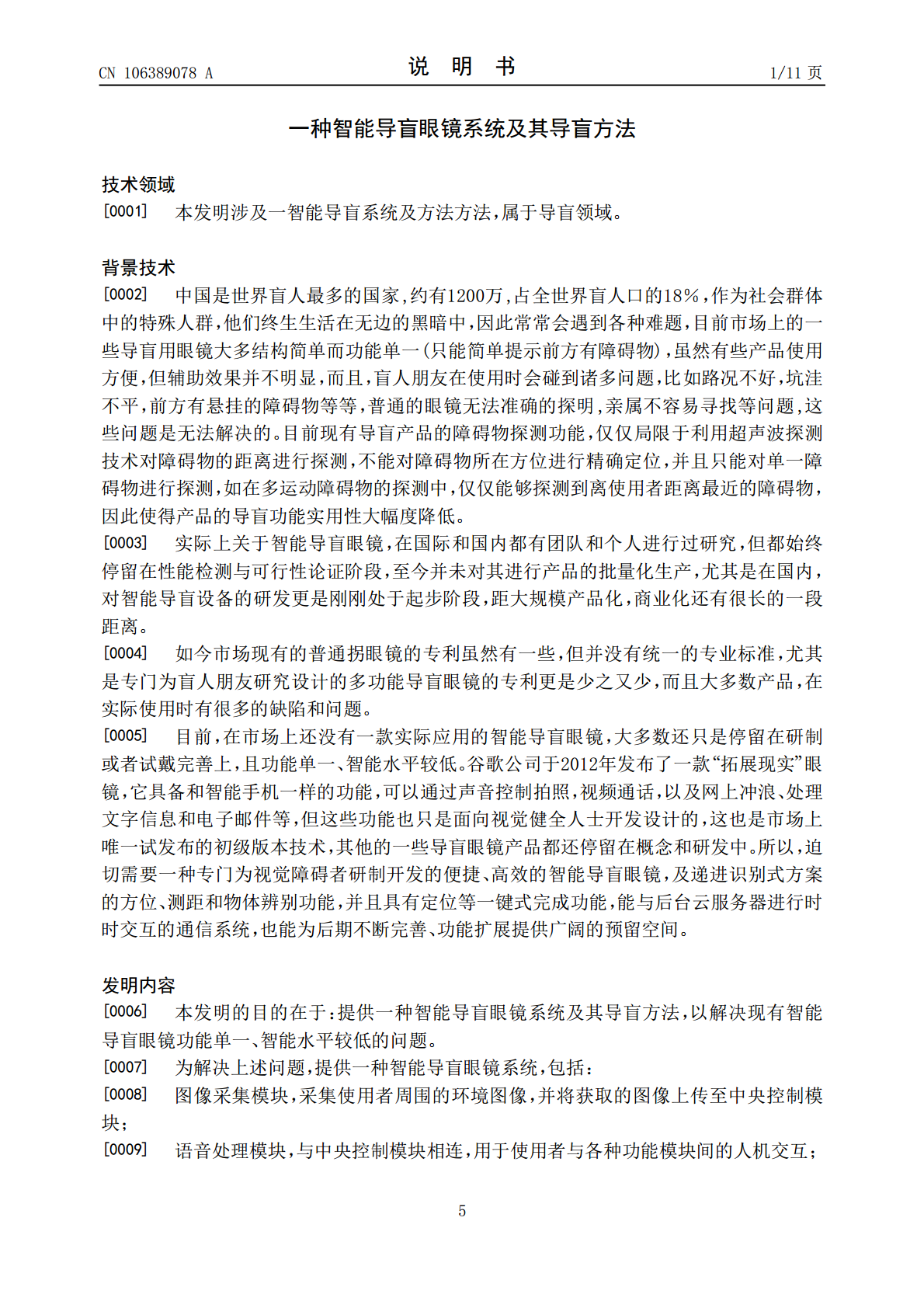
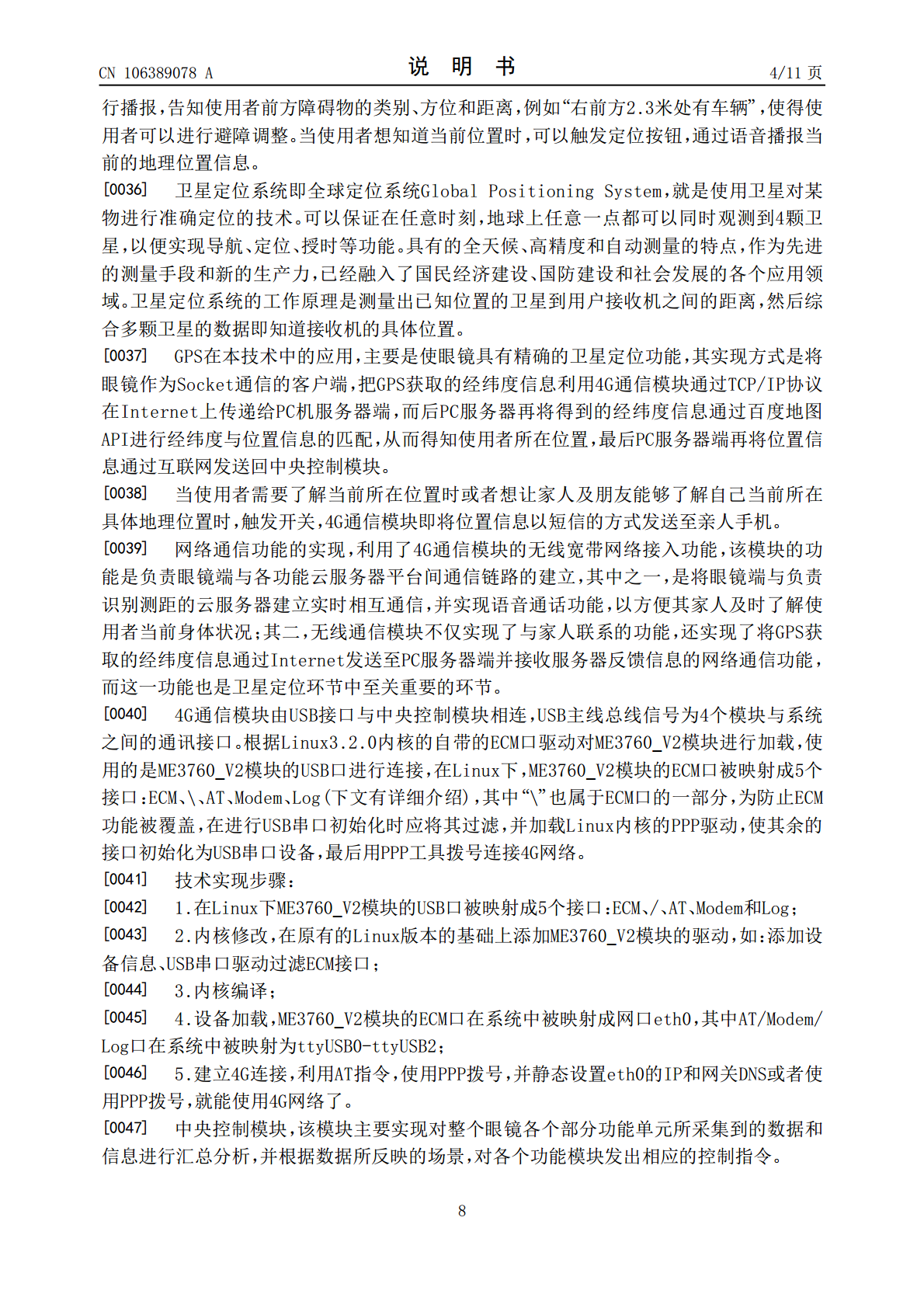
本发明提供一种智能导盲眼镜系统及其导盲方法,包括图像采集模块采集使用者周围的环境图像,并将获取的图像上传至中央控制模块,语音处理模块与中央控制模块相连,4G通信模块为眼镜端和负责识别测距的云服务器建立实时相互通信,并实现语音通话功能,中央控制模块对常见物体通过图像模板匹配和视差图进行识别与测距,如无法辨别,再利用4G通信模块发送至云服务器,云服务器通过在云服务器上搭建软件平台建立图像分析系统,利用深度学习神经网络,建立图像学习数据库,从上传的图像中获取障碍物距离与类别信息,并将信息反馈回中央控制模块。以解
一种智能导盲方法、智能导盲装置及智能导盲系统.pdf
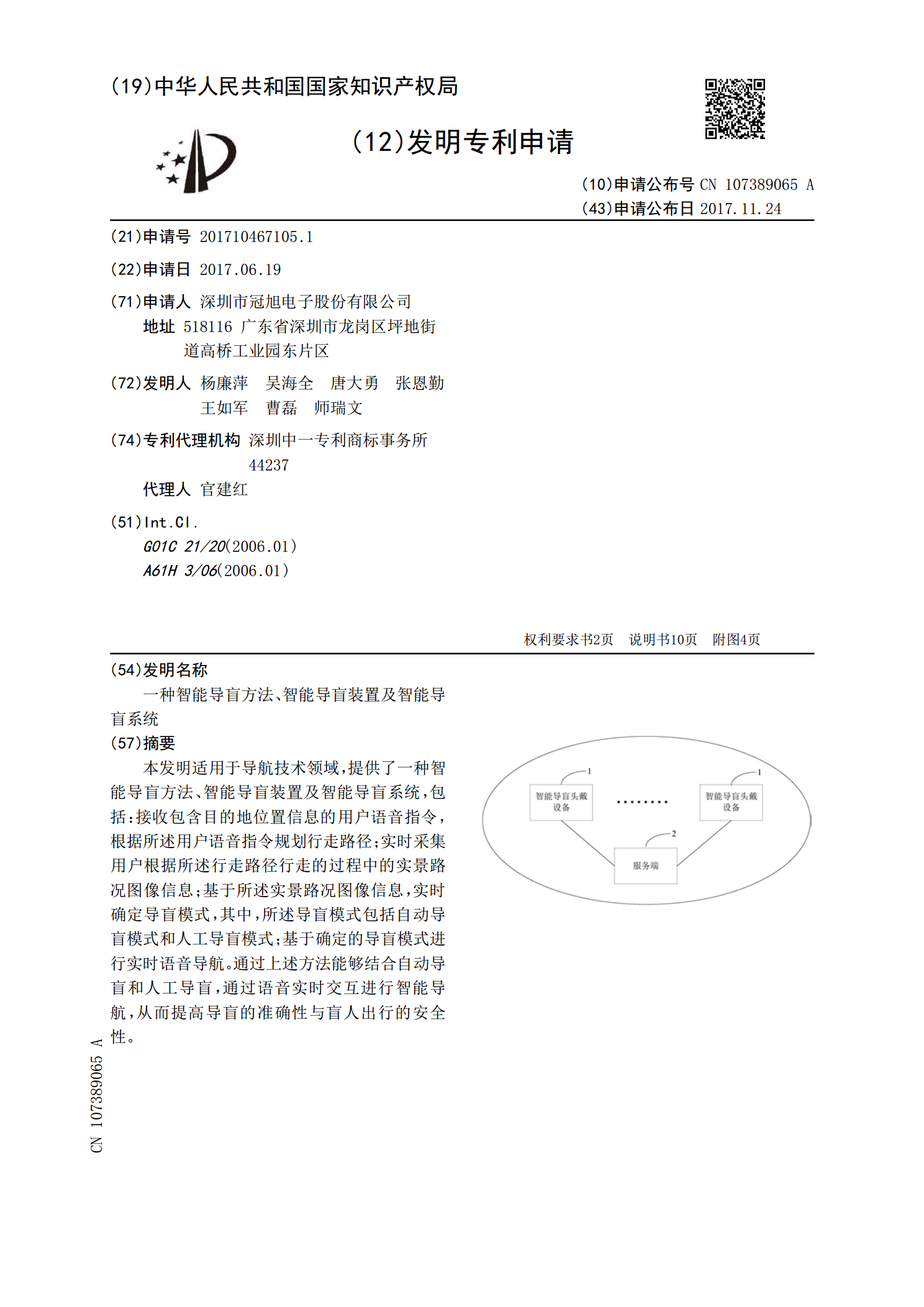
本发明适用于导航技术领域,提供了一种智能导盲方法、智能导盲装置及智能导盲系统,包括:接收包含目的地位置信息的用户语音指令,根据所述用户语音指令规划行走路径;实时采集用户根据所述行走路径行走的过程中的实景路况图像信息;基于所述实景路况图像信息,实时确定导盲模式,其中,所述导盲模式包括自动导盲模式和人工导盲模式;基于确定的导盲模式进行实时语音导航。通过上述方法能够结合自动导盲和人工导盲,通过语音实时交互进行智能导航,从而提高导盲的准确性与盲人出行的安全性。

一种智能导盲眼镜系统.pdf
本发明提供了一种智能导盲眼镜系统,安装有左仿生眼和右仿生眼,帮助盲人“重见光明”,同时本实施例的智能导盲眼镜还具有GPS模块,智能导盲眼镜会将GPS模块所收集的智能导盲眼镜的位置信息发送给服务器,服务器会存储该位置信息,从而可以利用大数据技术来分析这些数据,在使用者求救时,可以很好的定位使用者的位置,从而可以及时的进行救援;此外,还可以向使用者提供地图数据和周围人员情况,使盲人能够更容易发现潜在的交友对象,为使用者提供导航和交友服务,为盲人提供在线交友促进盲人克服自身的心理障碍。另外,通过设置插即用接口A
智能导盲系统及导盲方法.pdf
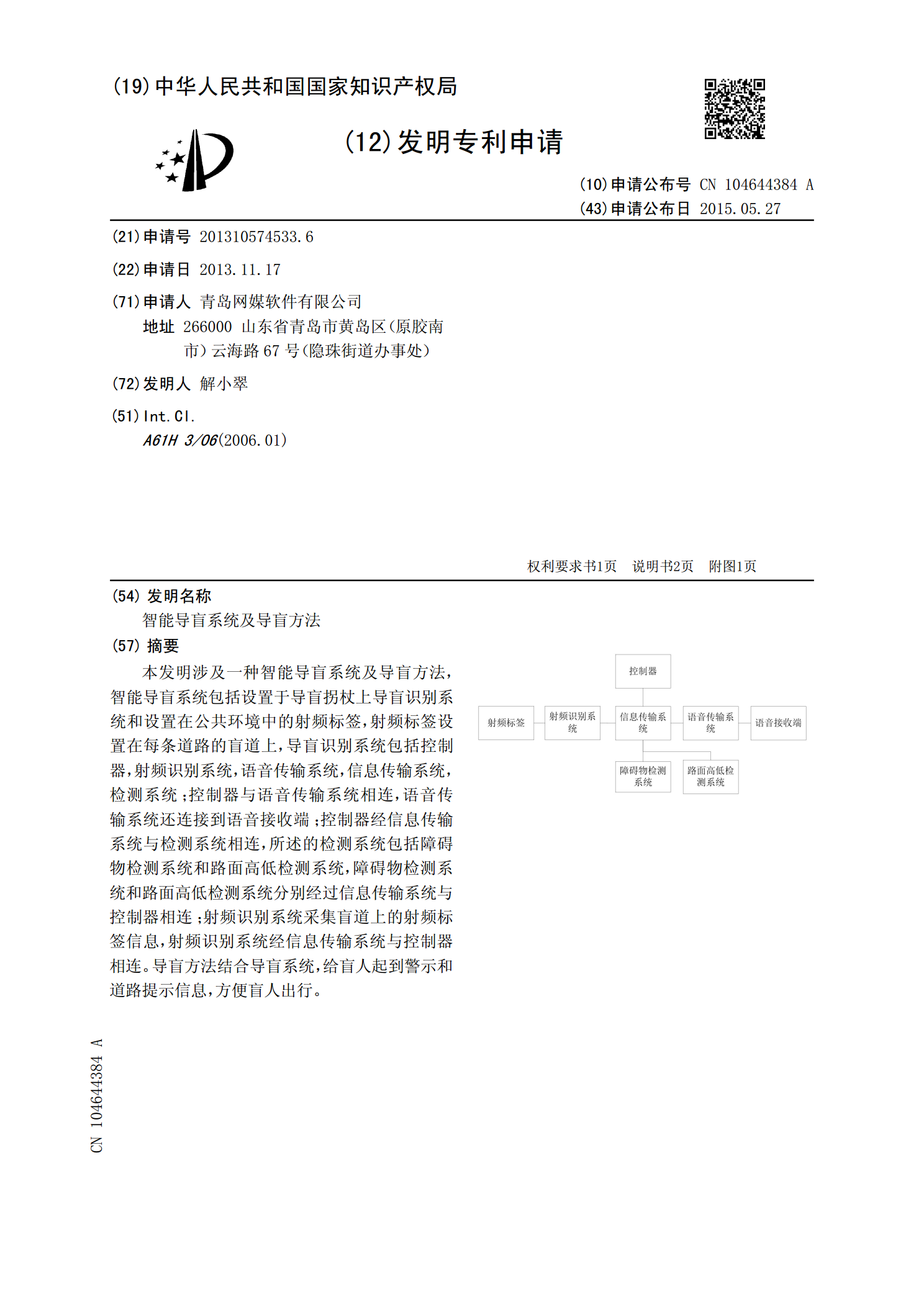
本发明涉及一种智能导盲系统及导盲方法,智能导盲系统包括设置于导盲拐杖上导盲识别系统和设置在公共环境中的射频标签,射频标签设置在每条道路的盲道上,导盲识别系统包括控制器,射频识别系统,语音传输系统,信息传输系统,检测系统;控制器与语音传输系统相连,语音传输系统还连接到语音接收端;控制器经信息传输系统与检测系统相连,所述的检测系统包括障碍物检测系统和路面高低检测系统,障碍物检测系统和路面高低检测系统分别经过信息传输系统与控制器相连;射频识别系统采集盲道上的射频标签信息,射频识别系统经信息传输系统与控制器相连。

一种智能导盲杖及其导盲方法.pdf
本发明公开一种智能导盲杖及其导盲方法,包括把手部、连接于把手部一端的伸缩部以及连接于伸缩部一端的触地部;所述把手部设有控制模块、超声波测距模块以及震动模块,所述控制模块与超声波测距模块电性连接,所述震动模块与控制模块电性连接。本发明通过超声波测距可以远距离探测使用者行走路径周围是否存在障碍物;当探测到障碍物时,可以通过震动的方式及时反馈给使用者,提醒使用者进行躲避;当出现应急情况时,可以通过拨号呼叫进行紧急呼叫,及时有效地联系家人。