
一种室内高精度盲人导航系统.pdf

一吃****永贺


1/8

2/8

3/8

4/8

5/8

6/8

7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种室内高精度盲人导航系统.pdf
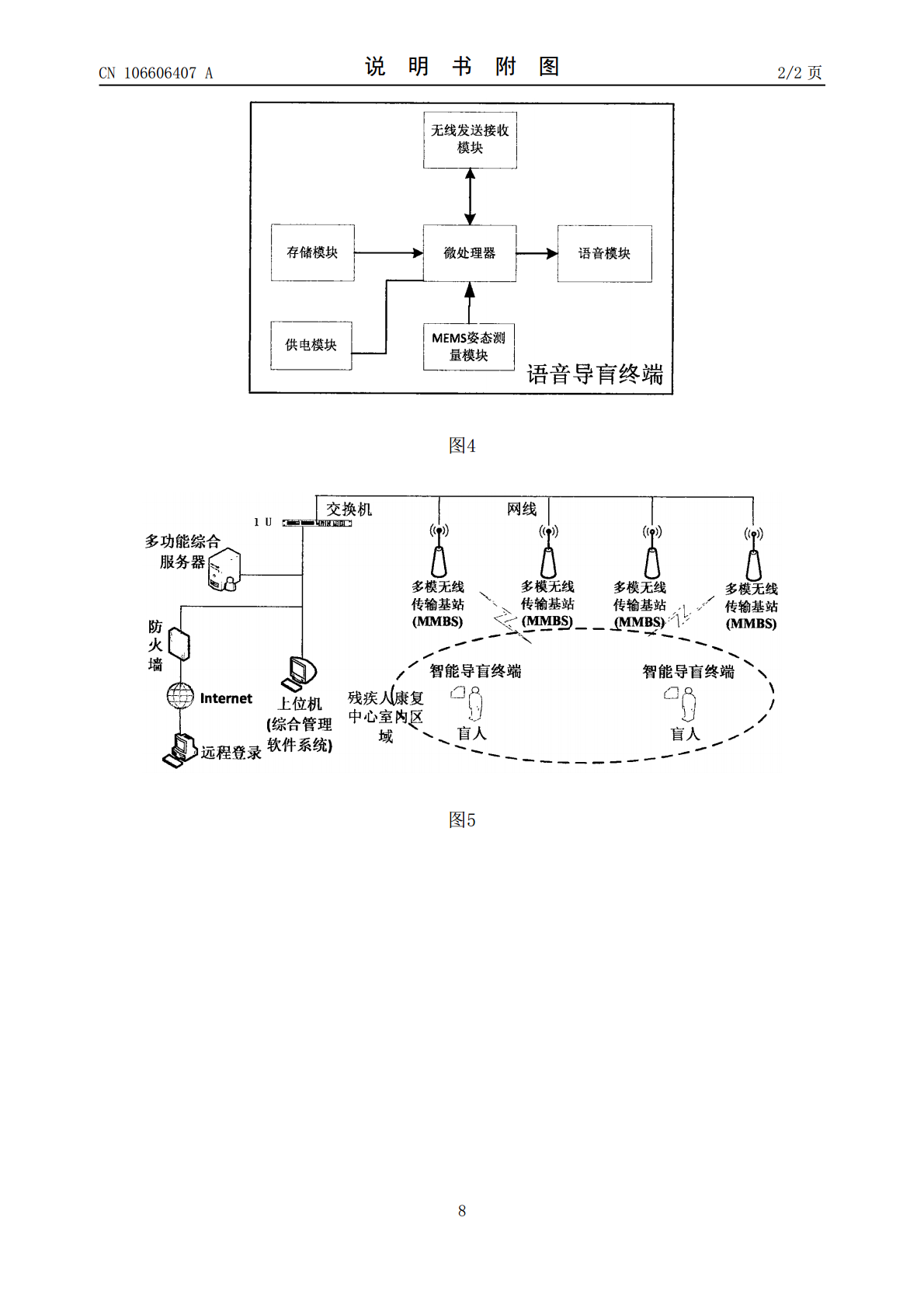
一种室内盲人导航系统,系统包括定位服务器、导盲基站、导盲终端、上位机综合管理软件;导盲终端集成了MEMS惯性测量组件,能过测量载体三轴加速度、角加速度信息,并实时传给定位服务器;实时定位子系统采用基于MEMS惯性器件的个人导航算法,采用融合室内地图的回溯粒子滤波算法修正惯性导航中的航向漂移;在特殊点采用无线电定位,当检测到盲人到达特殊点时,用特定点的坐标修正惯导的位置漂移;结合位置信息以及目的地信息,定位服务器规划一条最优的路径,并将这一路径的控制指令实时的发给求助者;求助者携带的导盲终端收到控制指令后在
一种盲人室内导航系统.pdf
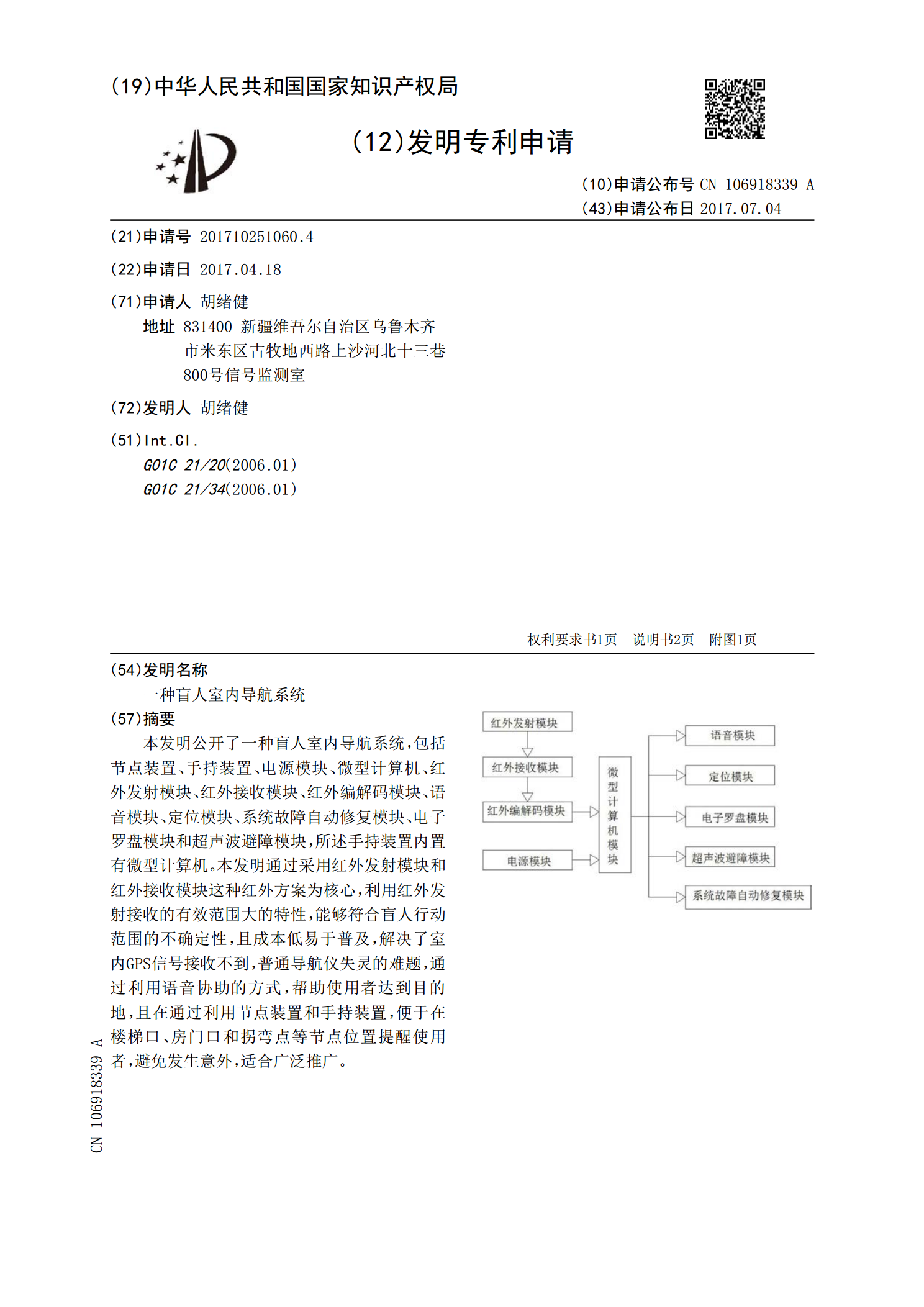
本发明公开了一种盲人室内导航系统,包括节点装置、手持装置、电源模块、微型计算机、红外发射模块、红外接收模块、红外编解码模块、语音模块、定位模块、系统故障自动修复模块、电子罗盘模块和超声波避障模块,所述手持装置内置有微型计算机。本发明通过采用红外发射模块和红外接收模块这种红外方案为核心,利用红外发射接收的有效范围大的特性,能够符合盲人行动范围的不确定性,且成本低易于普及,解决了室内GPS信号接收不到,普通导航仪失灵的难题,通过利用语音协助的方式,帮助使用者达到目的地,且在通过利用节点装置和手持装置,便于在楼
一种盲人室内无线导航系统.pdf
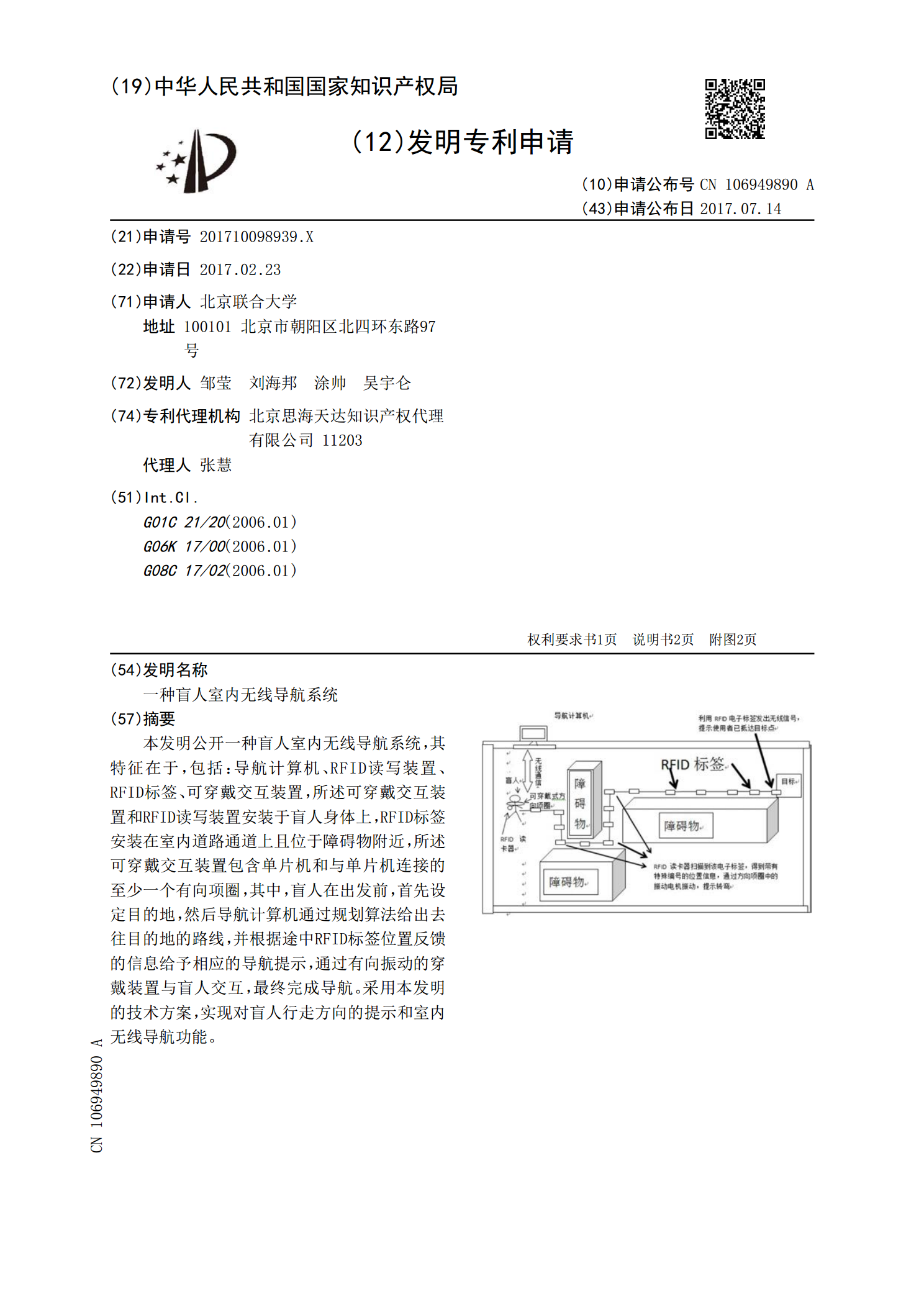
本发明公开一种盲人室内无线导航系统,其特征在于,包括:导航计算机、RFID读写装置、RFID标签、可穿戴交互装置,所述可穿戴交互装置和RFID读写装置安装于盲人身体上,RFID标签安装在室内道路通道上且位于障碍物附近,所述可穿戴交互装置包含单片机和与单片机连接的至少一个有向项圈,其中,盲人在出发前,首先设定目的地,然后导航计算机通过规划算法给出去往目的地的路线,并根据途中RFID标签位置反馈的信息给予相应的导航提示,通过有向振动的穿戴装置与盲人交互,最终完成导航。采用本发明的技术方案,实现对盲人行走方向的

一种室内盲人定位导航系统及其方法.pdf
本发明公开了一种室内盲人定位导航系统及其方法,包括UWB单元、中央处理模块、语音识别转换模块和Apriltag单元,UWB单元的输出端与中央处理模块的输入端连接,语音识别转换模块的输出端与中央处理模块的输入端连接,Apriltag单元的输出端与中央处理模块的输入端连接,涉及导航技术领域。该室内盲人定位导航系统及其方法,可以利用UWB对信道衰落不敏感、发射信号功率谱密度低、能提供厘米级的定位精度等优点实现盲人精准定位、利用Apritag来识别障碍物信息和优选择最优路线,当盲人独自在家时,可以减轻服务人员的实
一种盲人跨室内外步行导航系统及方法.pdf
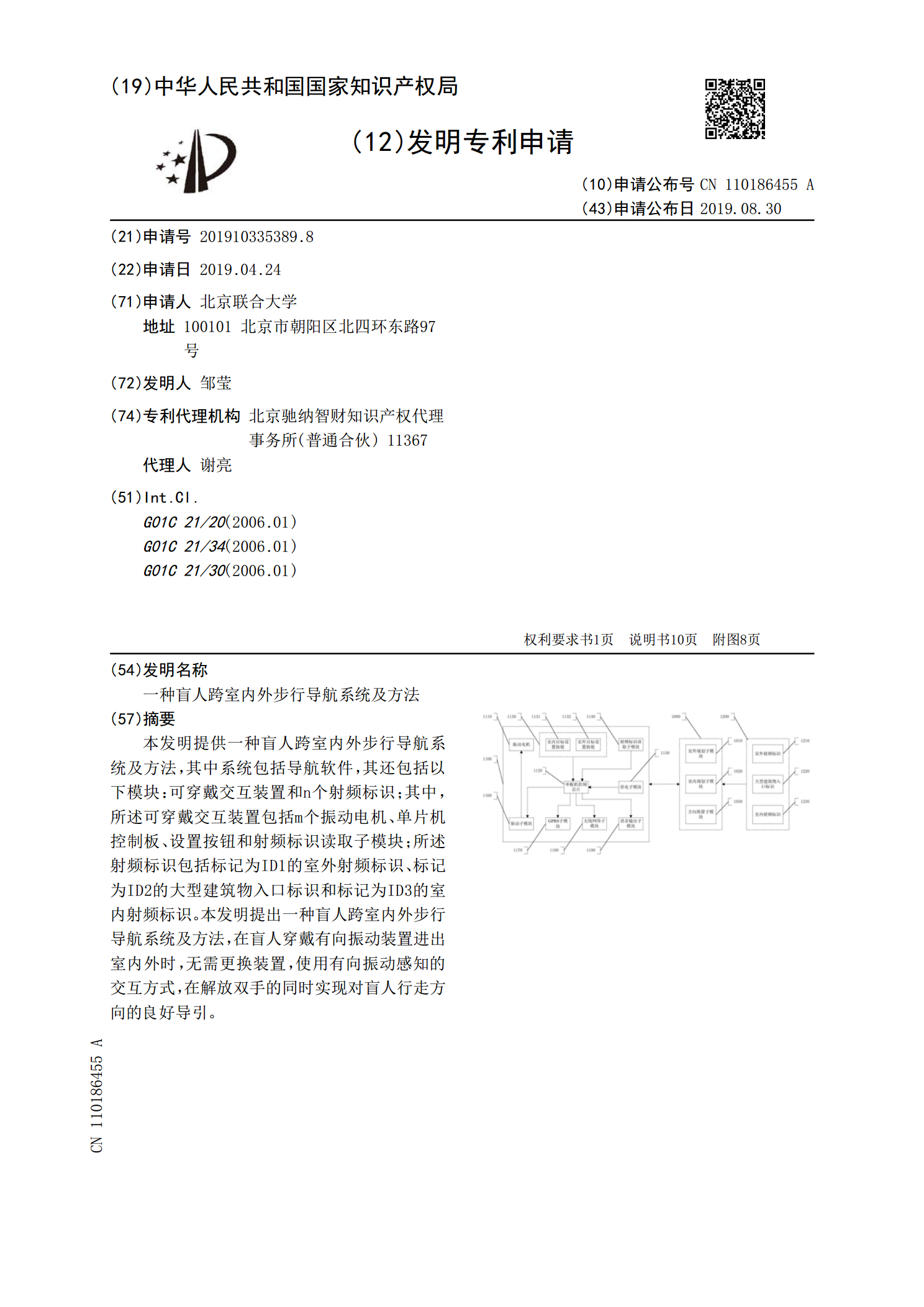
本发明提供一种盲人跨室内外步行导航系统及方法,其中系统包括导航软件,其还包括以下模块:可穿戴交互装置和n个射频标识;其中,所述可穿戴交互装置包括m个振动电机、单片机控制板、设置按钮和射频标识读取子模块;所述射频标识包括标记为ID1的室外射频标识、标记为ID2的大型建筑物入口标识和标记为ID3的室内射频标识。本发明提出一种盲人跨室内外步行导航系统及方法,在盲人穿戴有向振动装置进出室内外时,无需更换装置,使用有向振动感知的交互方式,在解放双手的同时实现对盲人行走方向的良好导引。