
一种简单镜头成像的多通道PSF标定方法.pdf

Ch****75

1/8
2/8
3/8

4/8
5/8
6/8
7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种简单镜头成像的多通道PSF标定方法.pdf
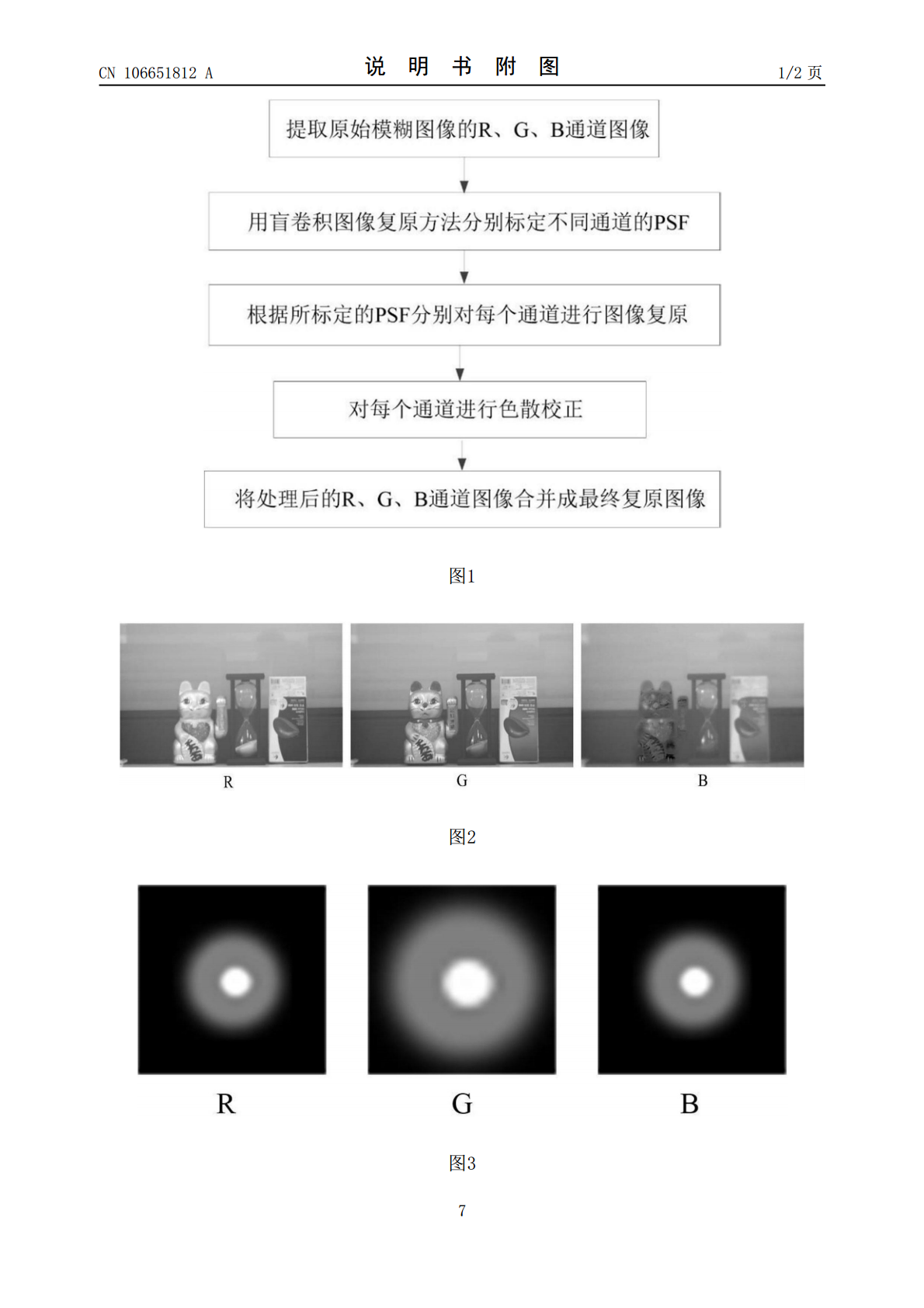
本发明公开了一种简单镜头成像的多通道PSF标定方法,涉及图像复原技术领域,包括:提取彩色模糊图像的R、G、B通道图像;利用盲卷积图像复原算法分别估计R、G、B通道图像对应的PSF;基于每个通道的PSF对每个通道图像做去模糊处理;对每个通道单独做色散校正;将处理之后的R、G、B通道图像进行融合得到最终的清晰复原图像。本方法不同于传统方法对三个通道使用同一个PSF,分通道估计的PSF更加准确,去模糊效果更好,同时有效解决了色散在传统去模糊过程进一步加剧的问题,很好地提高最终图像复原质量。

一种多通道时域荧光层析成像系统标定方法.pdf
本发明属于组织光学测量技术领域,涉及一种时域荧光层析成像系统标定方法,该方法用于标定系统各个通道传输因子,步骤如下:搭建用于替代成像系统中的成像腔的标定装置;将源光纤和探测光纤分别插在成像腔体上;在插槽内放置一些镜头纸,将探测光纤与第一通道相连;把780nm激光器打开,对与该通道相应的滤波轮上的所有中性滤光片的衰减率进行标定;把780nm激光器关掉,把830nm激光器打开,对该通道相应的滤波轮上的830nm长通滤光片的透过率的进行标定;重复上述步骤,完成对各个通道的滤波轮上所有中性滤光片的相对衰减率和83
一种亮度通道引导的简单镜头成像模糊去除方法.pdf
本发明公开了一种亮度通道引导的简单镜头成像模糊去除方法,涉及图像复原技术领域,包括:将RGB彩色图像转换成YUV格式图像,并提取亮度Y图像,以亮度Y作为引导图像,利用盲卷积图像复原算法进行简单镜头的PSF标定,然后再利用非盲卷积图像复原算法对模糊图像进行去模糊处理,得到最终的清晰图像。本方法不同于传统方法直接利用RGB图像进行PSF标定,亮度Y通道并不包含色度信息,以亮度Y通道为引导可以避免简单透镜的色散对PSF标定精度的影响,从而提高最终图像复原质量。

多镜头成像装置及多镜头成像系统.pdf
本发明涉及一种多镜头成像装置及多镜头成像系统,前者具有光传感器、镜头以及棱镜,光传感器具有一个,镜头具有至少两个,各个镜头采集到的光线经过棱镜后射向光传感器;后者包括具有多个控制单元的主控板和前者,其中,控制单元包括:光线感应单元、视频编码单元以及拼接渲染单元。本发明能够在棱镜的作用下,将多个镜头采集到的光射向同一个光传感器,然后经过后续的视频编码和图像拼接生成图像,与现有技术相比,本发明具有能够提高成像一致性、简化图像生成过程、降低硬件成本等有益效果。

一种用于多药筒烟花爆竹检测的多镜头成像方法.pdf
本发明公开了一种用于多药筒烟花爆竹检测的多镜头成像方法,在用于托持运输烟花爆竹的传送带的上方装设有成像装置,所述成像装置用于对烟花爆竹拍摄成像。相比让工作人员跟随流水线检测,本发明的方法更加节省人力,且工作人员不仅检测的速度更快,还有更多的时间判断和记录结果,检测结果也更加准确,同时图像也能作为一种可保留的之后对检测结果校对的证据;并且整个成像过程时间短,提高了爆竹检测的效率。