
一种盲人导航方法、装置及系统.pdf

一条****贺6

1/9
2/9

3/9

4/9
5/9

6/9

7/9
8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种盲人导航方法、装置及系统.pdf
本发明公开了一种盲人导航方法、装置及系统,属于盲人导航技术领域。本发明实施例提供的盲人导航方法,其特征在于,包括以下步骤:确定当前的地理位置;获取所述当前的地理位置的路况信息,其中,所述路况信息通过多用户群智感知数据确定;根据所述路况信息,进行导航。本发明实施例提出的盲人导航方法、装置及系统,用于将群智感知技术应用到盲人导航中,提高了盲人导航的准确性。
盲人导航方法及盲人导航装置.pdf
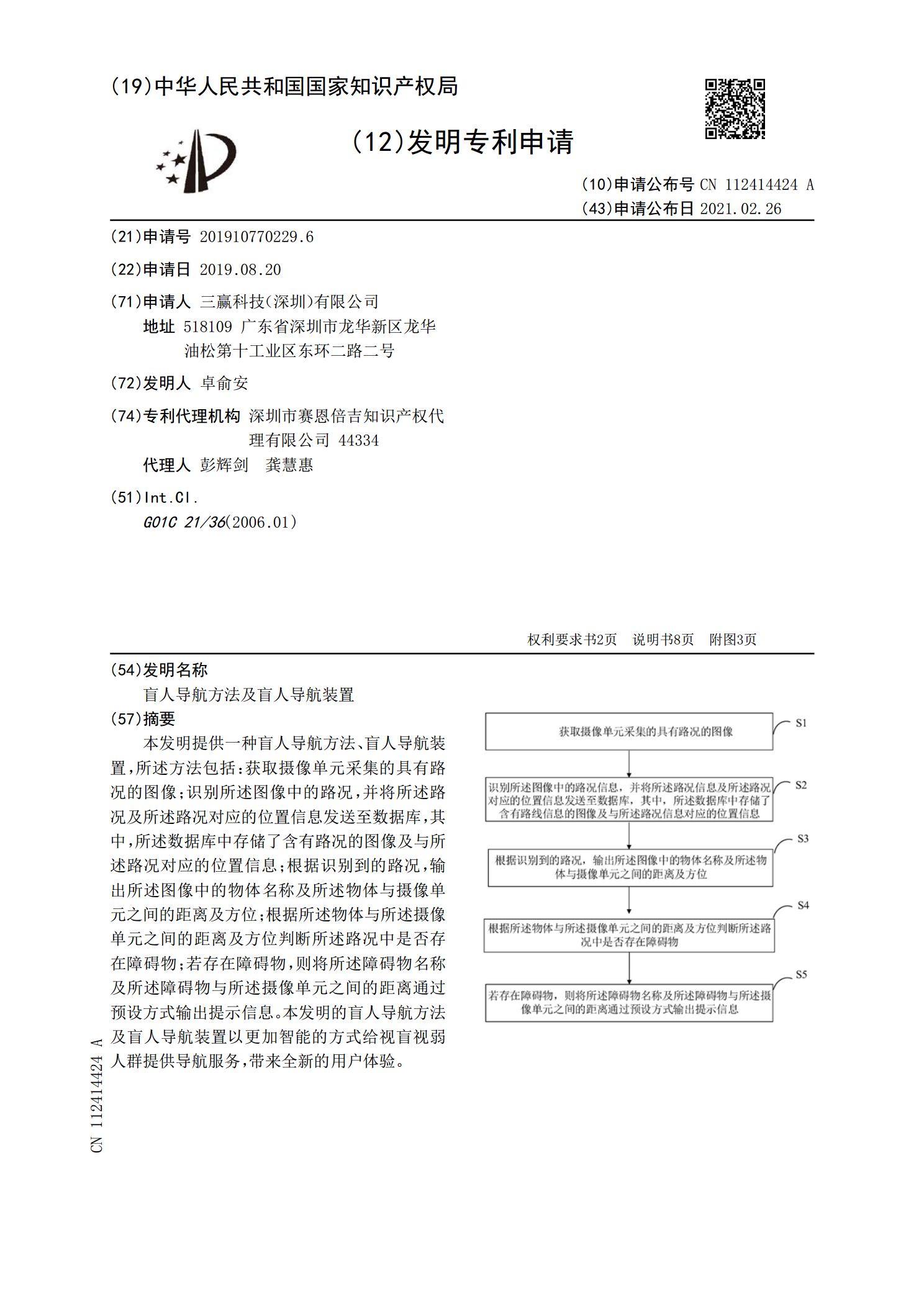
本发明提供一种盲人导航方法、盲人导航装置,所述方法包括:获取摄像单元采集的具有路况的图像;识别所述图像中的路况,并将所述路况及所述路况对应的位置信息发送至数据库,其中,所述数据库中存储了含有路况的图像及与所述路况对应的位置信息;根据识别到的路况,输出所述图像中的物体名称及所述物体与摄像单元之间的距离及方位;根据所述物体与所述摄像单元之间的距离及方位判断所述路况中是否存在障碍物;若存在障碍物,则将所述障碍物名称及所述障碍物与所述摄像单元之间的距离通过预设方式输出提示信息。本发明的盲人导航方法及盲人导航装置以
一种盲人导航提醒装置及导航方法.pdf
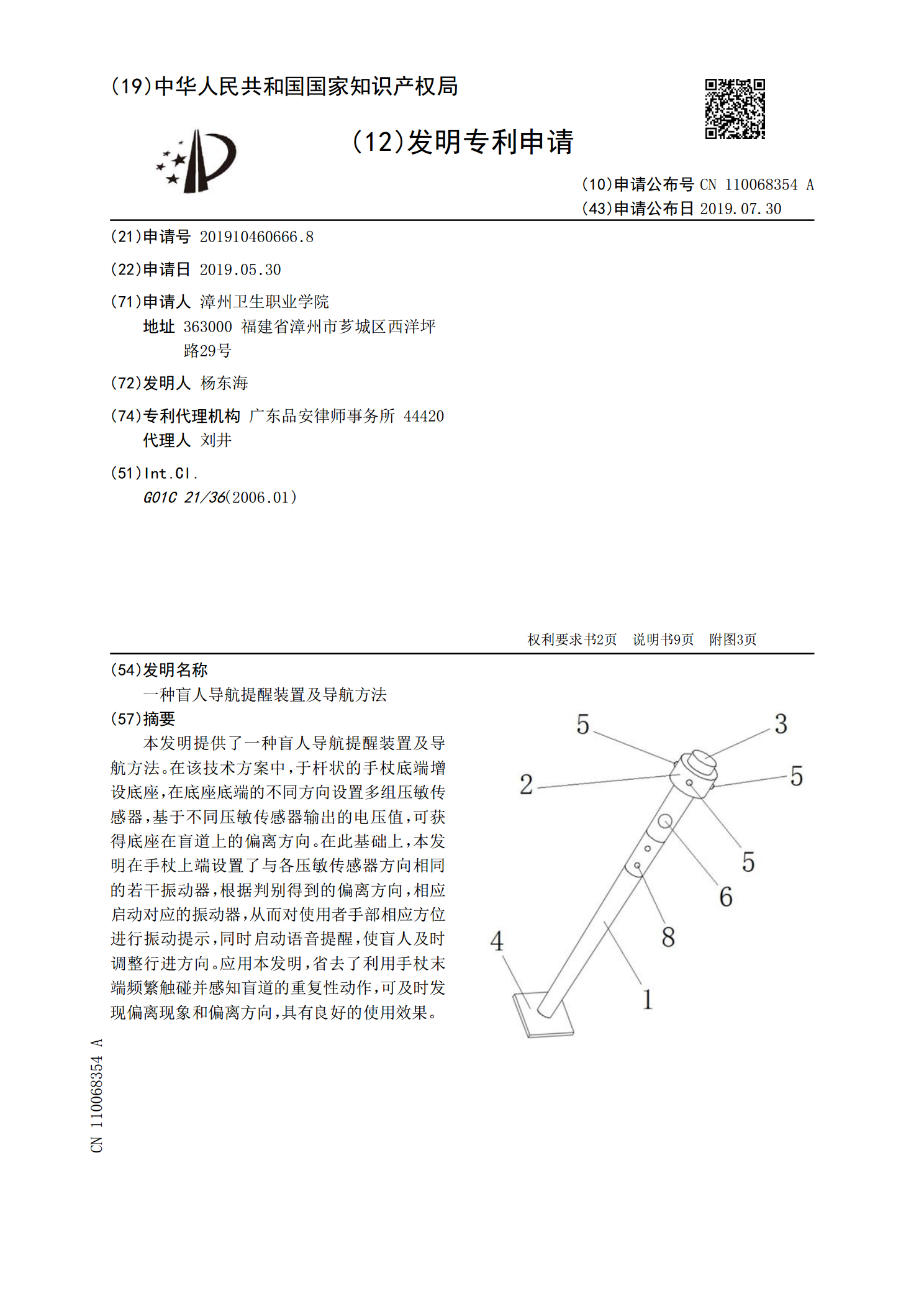
本发明提供了一种盲人导航提醒装置及导航方法。在该技术方案中,于杆状的手杖底端增设底座,在底座底端的不同方向设置多组压敏传感器,基于不同压敏传感器输出的电压值,可获得底座在盲道上的偏离方向。在此基础上,本发明在手杖上端设置了与各压敏传感器方向相同的若干振动器,根据判别得到的偏离方向,相应启动对应的振动器,从而对使用者手部相应方位进行振动提示,同时启动语音提醒,使盲人及时调整行进方向。应用本发明,省去了利用手杖末端频繁触碰并感知盲道的重复性动作,可及时发现偏离现象和偏离方向,具有良好的使用效果。
一种盲人导航方法及装置.pdf
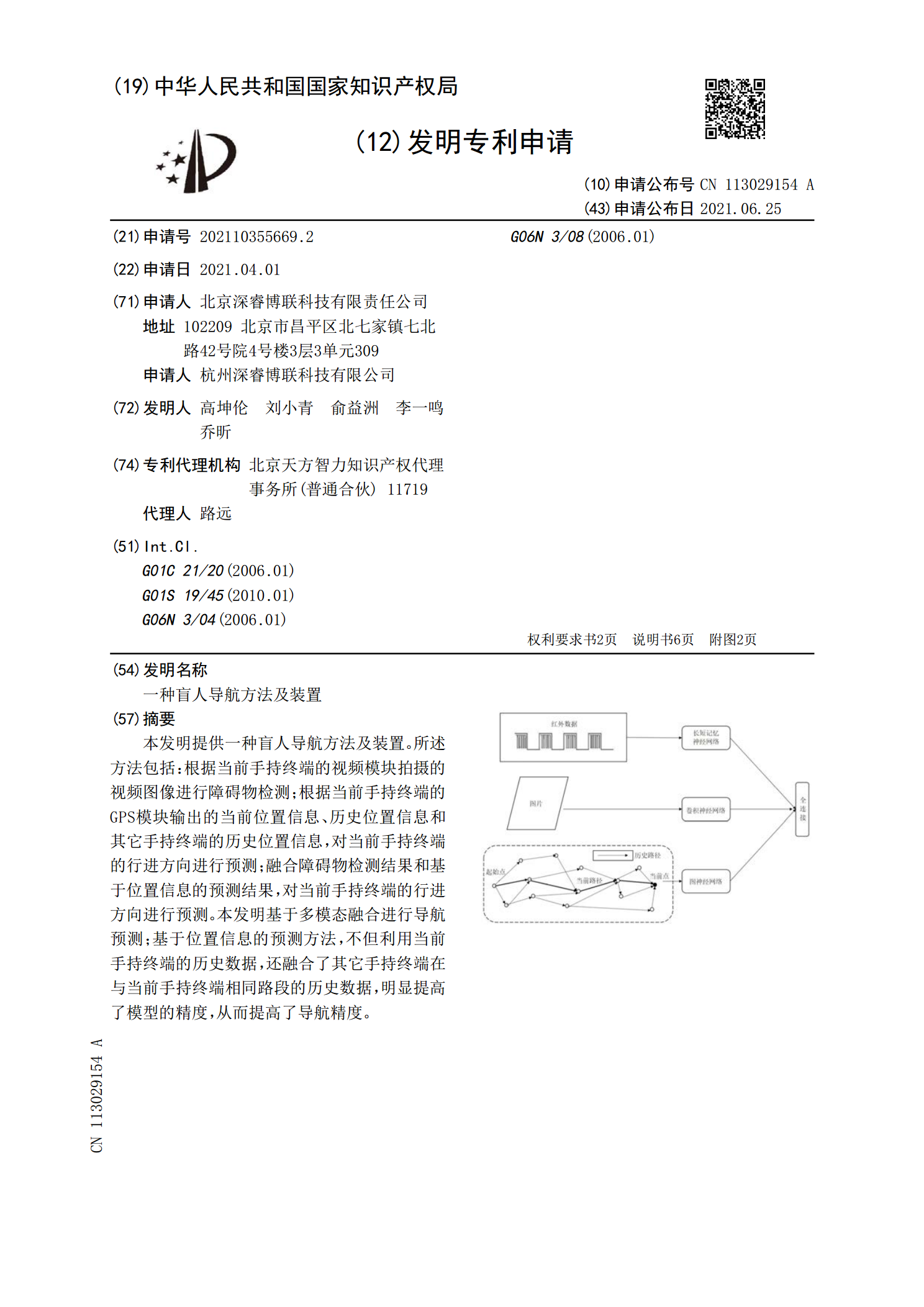
本发明提供一种盲人导航方法及装置。所述方法包括:根据当前手持终端的视频模块拍摄的视频图像进行障碍物检测;根据当前手持终端的GPS模块输出的当前位置信息、历史位置信息和其它手持终端的历史位置信息,对当前手持终端的行进方向进行预测;融合障碍物检测结果和基于位置信息的预测结果,对当前手持终端的行进方向进行预测。本发明基于多模态融合进行导航预测;基于位置信息的预测方法,不但利用当前手持终端的历史数据,还融合了其它手持终端在与当前手持终端相同路段的历史数据,明显提高了模型的精度,从而提高了导航精度。

一种盲人导航系统及导航方法.pdf
本发明涉及基于公共场所的盲人导航方法及其导航系统。该盲人导航方法,包括:步骤S1,在公共场所的不同区域设置标签,并建立相应的标签拓扑数据结构;步骤S2,在接入点设备上确定最近标签及目的标签;步骤S3,在接入点设备上根据最近标签、目的标签及标签拓扑数据结构形成标签拓扑路径;步骤S4,接入点设备与标签拓扑路径中的各个标签依序建立通信,接入点设备根据其与各个标签之间的距离进行提示以引导盲人依序到达标签拓扑路径中的各个标签。本发明提出了一种导航方法,有助于盲人在一公共场所内进行导航,方便到达指定位置。