
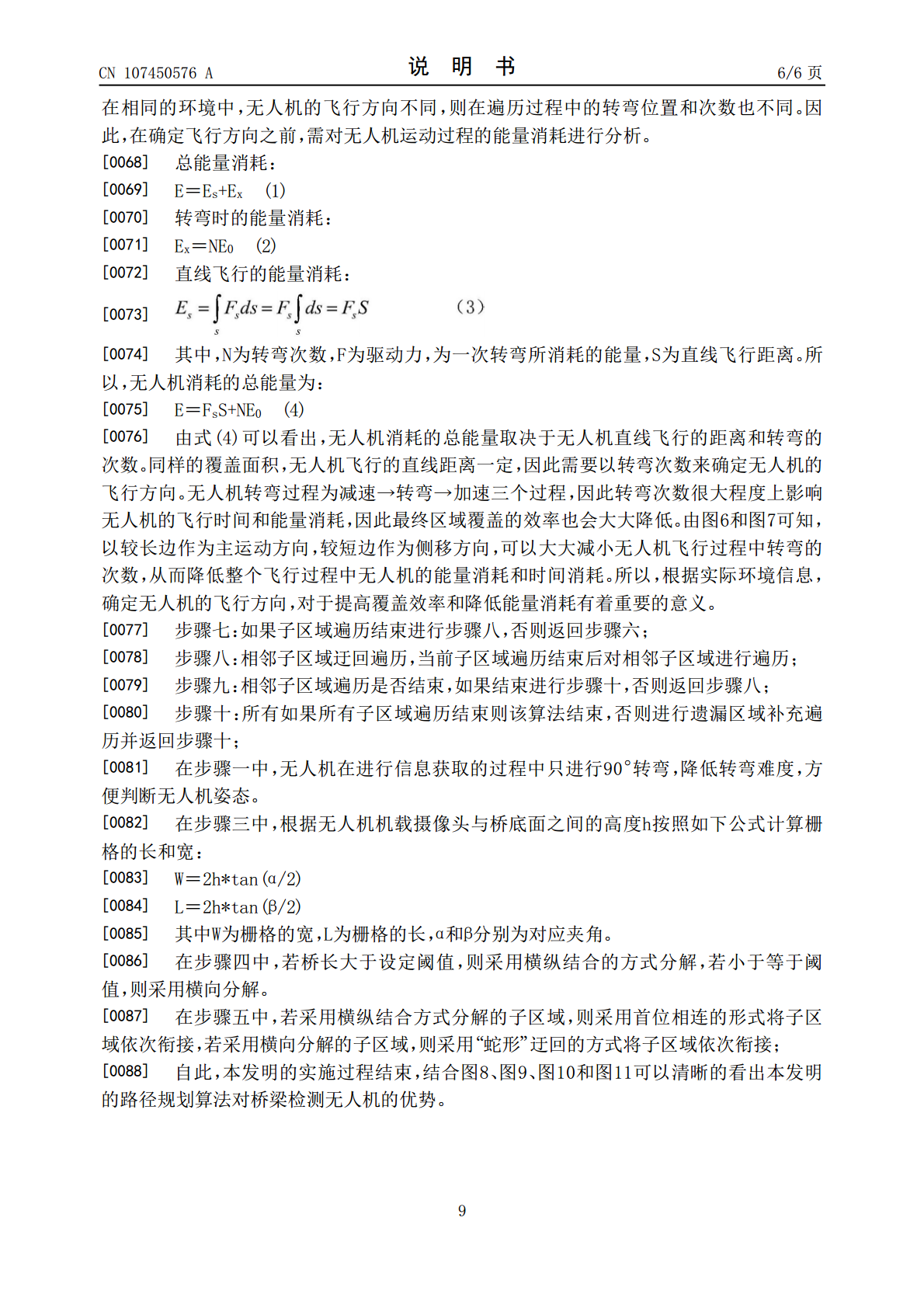
一种桥梁检测无人机路径规划的方法.pdf

是来****文章

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种桥梁检测无人机路径规划的方法.pdf
本发明公开了一种桥梁检测无人机路径规划的方法,属于无人机路径规划技术领域。它具体包括以下主要过程:利用沿边飞行的方法获取桥梁的轮廓信息,基于栅格法的环境模型构建,目标区域分解,相邻子区域的衔接,子区域最优路径的遍历,桥底面的全覆盖遍历。本发明算法理论上重复率低,覆盖率高,不存在检测盲区;算法简单,容易实现。本发明算法能够较好的满足无人机对桥底面进行全覆盖遍历路径规划的任务。

一种无人机路径规划方法.pdf
本发明提供了一种无人机路径规划方法,包括以下步骤:步骤1,设定无人机需要执行的任务点为从点A到点B,按照voronoi图方法生成包围住障碍点的多边形;步骤2,将多边形顶点坐标筛选;步骤3,从A点开始,依次向外探寻最短路径。本发明提供了一种无人机在两点之间飞行时,如何巧妙地避开障碍点并以最短路径到达下一任务点的飞行路径方法,为后续在多机避障飞行和任务规划奠定基础。

桥梁检测无人机路径规划算法研究的开题报告.docx
桥梁检测无人机路径规划算法研究的开题报告一、项目背景桥梁是交通运输的重要组成部分,对保障交通的安全性和流畅性起着关键作用。在桥梁的设计、施工和维护过程中,检测是至关重要的一环。传统的桥梁检测方式包括人工巡查和使用高空作业车进行检测,但这些方式存在安全隐患和操作复杂、效率低下的问题。近年来,无人机在桥梁检测领域得到广泛应用,该技术不仅可以提高检测精度,还可以减少工人的受伤风险。然而,无人机的有效飞行路径规划是桥梁检测的核心任务之一。路径规划应该能够确保无人机具有最佳的拍摄角度,同时避开桥梁结构可能存在的障碍
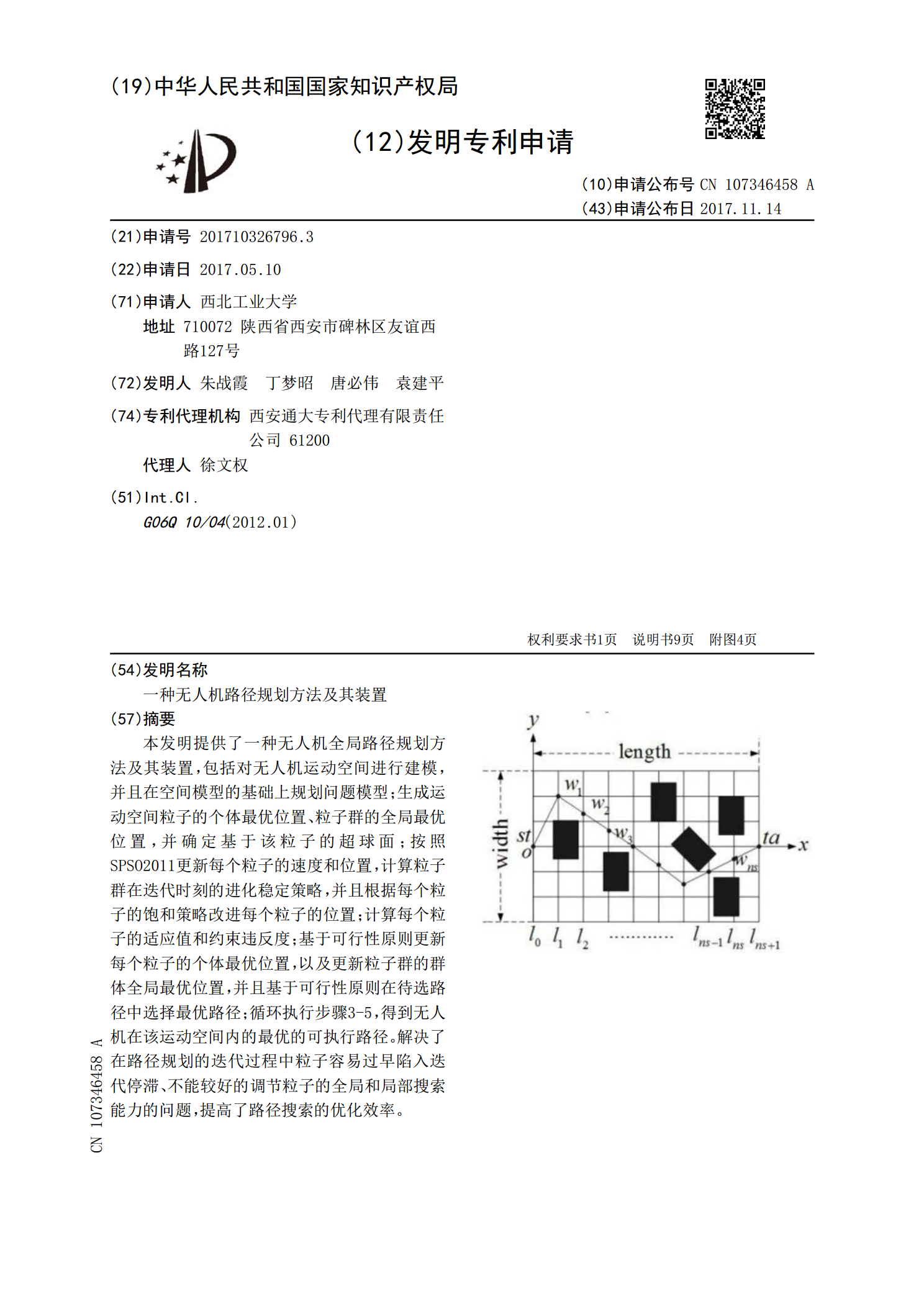
一种无人机路径规划方法及其装置.pdf
本发明提供了一种无人机全局路径规划方法及其装置,包括对无人机运动空间进行建模,并且在空间模型的基础上规划问题模型;生成运动空间粒子的个体最优位置、粒子群的全局最优位置,并确定基于该粒子的超球面;按照SPSO2011更新每个粒子的速度和位置,计算粒子群在迭代时刻的进化稳定策略,并且根据每个粒子的饱和策略改进每个粒子的位置;计算每个粒子的适应值和约束违反度;基于可行性原则更新每个粒子的个体最优位置,以及更新粒子群的群体全局最优位置,并且基于可行性原则在待选路径中选择最优路径;循环执行步骤3?5,得到无人机在该
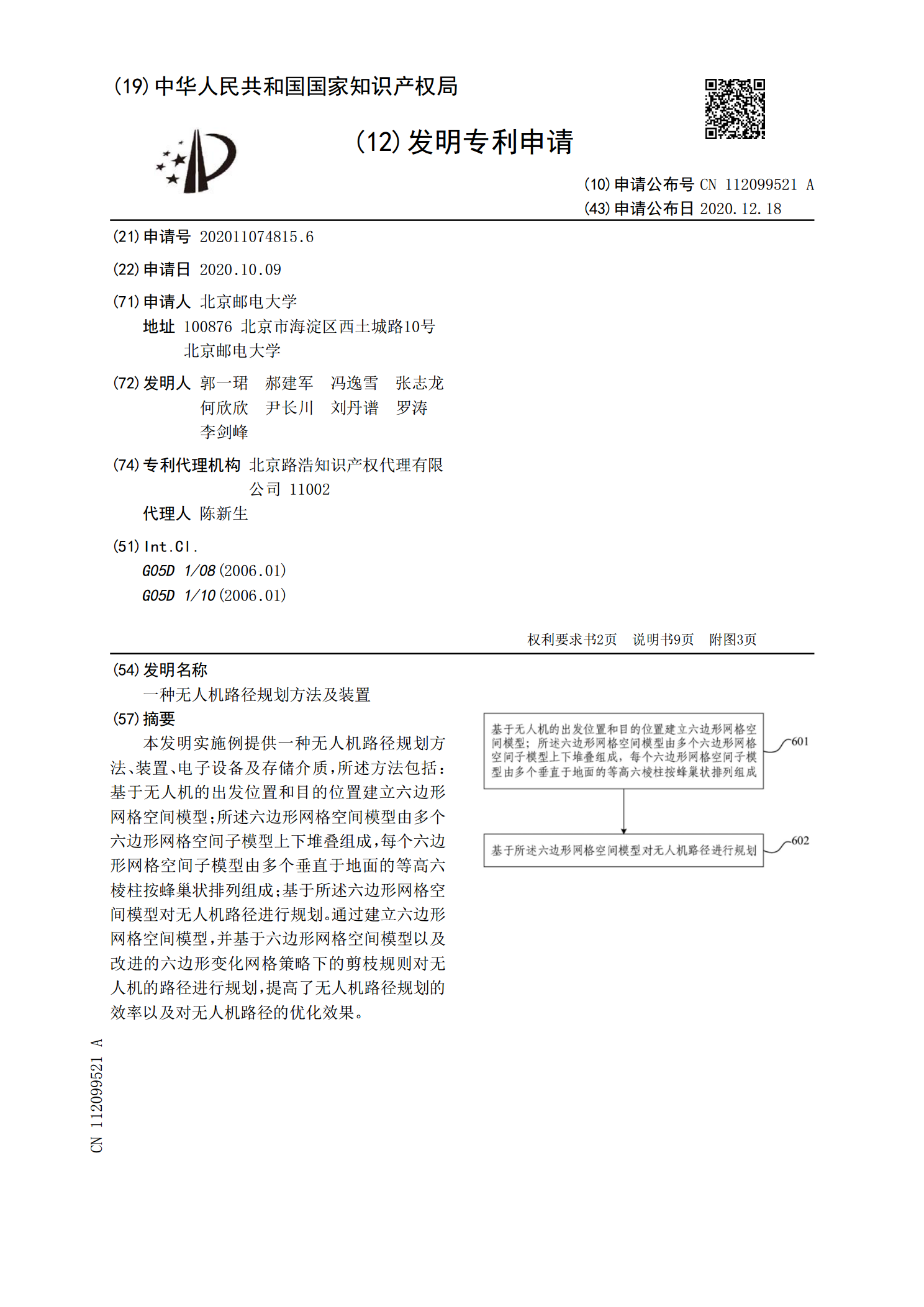
一种无人机路径规划方法及装置.pdf
本发明实施例提供一种无人机路径规划方法、装置、电子设备及存储介质,所述方法包括:基于无人机的出发位置和目的位置建立六边形网格空间模型;所述六边形网格空间模型由多个六边形网格空间子模型上下堆叠组成,每个六边形网格空间子模型由多个垂直于地面的等高六棱柱按蜂巢状排列组成;基于所述六边形网格空间模型对无人机路径进行规划。通过建立六边形网格空间模型,并基于六边形网格空间模型以及改进的六边形变化网格策略下的剪枝规则对无人机的路径进行规划,提高了无人机路径规划的效率以及对无人机路径的优化效果。