
可自主避障的隧道衬砌检测装置.pdf

一只****呀9


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共22页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

可自主避障的隧道衬砌检测装置.pdf
本发明公开了一种可自主避障的隧道衬砌检测装置,包括:能够移动的作业平台(70);拱顶机械臂(10)的下端通过第一销轴(11)与作业平台(70)铰接,第一销轴(11)的轴线与作业平台(70)的进行方向平行,拱顶机械臂(10)的上端连接有地质雷达(60),拱顶机械臂(10)能够伸缩,拱顶机械臂(10)连接有能够驱动拱顶机械臂(10)以第一销轴(11)为轴摆动的顶臂摆转驱动机构。该可自主避障的隧道衬砌检测装置对于隧道衬砌大型机械化作业模式来说是一次本质的飞跃,其特点是全自动作业,检测速度大幅提升,相应速度快,检

车载隧道衬砌检测装置的实时避障方法及装置.pdf
本发明公开了一种车载隧道衬砌检测装置的实时避障方法及装置,涉及隧道衬砌自动检测技术领域,其中该方法包括:在车载隧道衬砌检测装置进行走行作业时,获取三维实时点云数据、实时隧道断面信息、车载隧道衬砌检测装置的实时坐标数据;利用同步定位与建图SLAM算法对这些数据进行实时建图,得到实时点云地图信息;根据实时点云地图信息,确定车载隧道衬砌检测装置的包络路径与隧道内障碍物位置之间的干涉路径信息;根据干涉路径信息,确定车载隧道衬砌检测装置的实时避障策略,根据实时避障策略,控制车载隧道衬砌检测装置进行实时避障。本发明可

自主避障代码.doc
intE1=5;intM1=4;intE2=6;intM2=7;intLightSensorPin=0;intLeftDistanceSensorPin=9;intRightDistanceSensorPin=8;intLEDPin=13;intspd=200;voidstop(void){analogWrite(E1,0);analogWrite(E2,0);}voidforward(chara,charb){analogWrite(E1,a);digitalWrite(M1,HIGH);analogW

隧道衬砌检测装置及方法.pdf
本发明公开了一种隧道衬砌检测装置及方法,其中该装置包括:控制模块,用于根据待检测隧道的类型,确定要开启的第一空气耦合型天线;初始根据第一空气耦合型天线与衬砌之间的距离,确定发射功率;接收到数据处理模块发送的信噪比时,根据信噪比、距离,更新发射功率;将发射功率、工作模式发送给第一空气耦合型天线;第一空气耦合型天线,用于根据发射功率发射电磁波,根据工作模式采集电磁波反射数据;将电磁波反射数据发送给数据处理模块;数据处理模块,用于对电磁波反射数据进行去直流、去背景、聚焦算法处理、奇异分解处理,得到电磁波反射数据
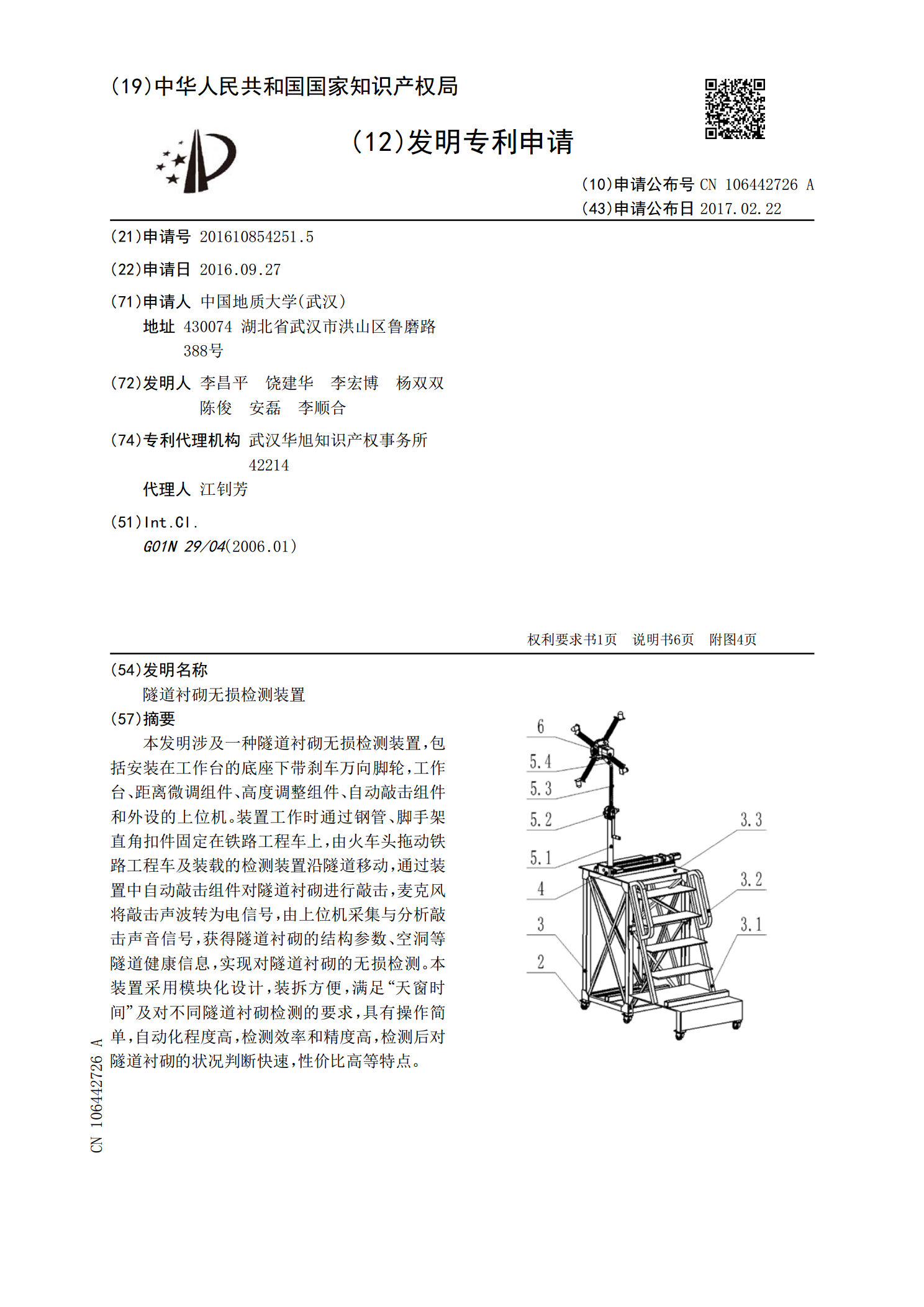
隧道衬砌无损检测装置.pdf
本发明涉及一种隧道衬砌无损检测装置,包括安装在工作台的底座下带刹车万向脚轮,工作台、距离微调组件、高度调整组件、自动敲击组件和外设的上位机。装置工作时通过钢管、脚手架直角扣件固定在铁路工程车上,由火车头拖动铁路工程车及装载的检测装置沿隧道移动,通过装置中自动敲击组件对隧道衬砌进行敲击,麦克风将敲击声波转为电信号,由上位机采集与分析敲击声音信号,获得隧道衬砌的结构参数、空洞等隧道健康信息,实现对隧道衬砌的无损检测。本装置采用模块化设计,装拆方便,满足“天窗时间”及对不同隧道衬砌检测的要求,具有操作简单,自动