
物料表面刮平机器人及刮平物料的方法.pdf

一条****涛k


1/10

2/10
3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

物料表面刮平机器人及刮平物料的方法.pdf
本发明公开了一种物料表面刮平机器人及刮平物料的方法,物料表面刮平机器人包括主机架,子机架,刮平机构和升降机构,子机架滑动设于主机架上表面,升降机构的内侧与子机架连接,外侧与刮平机构固定连接,刮平机构包括对目标墙面进行刮平处理的上抹板,以及对目标墙面进行二次刮平处理和收尾的下抹板。刮平物料的方法是采用物料表面刮平机器人刮平目标墙面的方法。本发明的优点是对目标墙面进行抹平时,不存在盲区,无需人工二次收边,保证了工作效率,降低了人工成本。
刮平抹平机器人.pdf
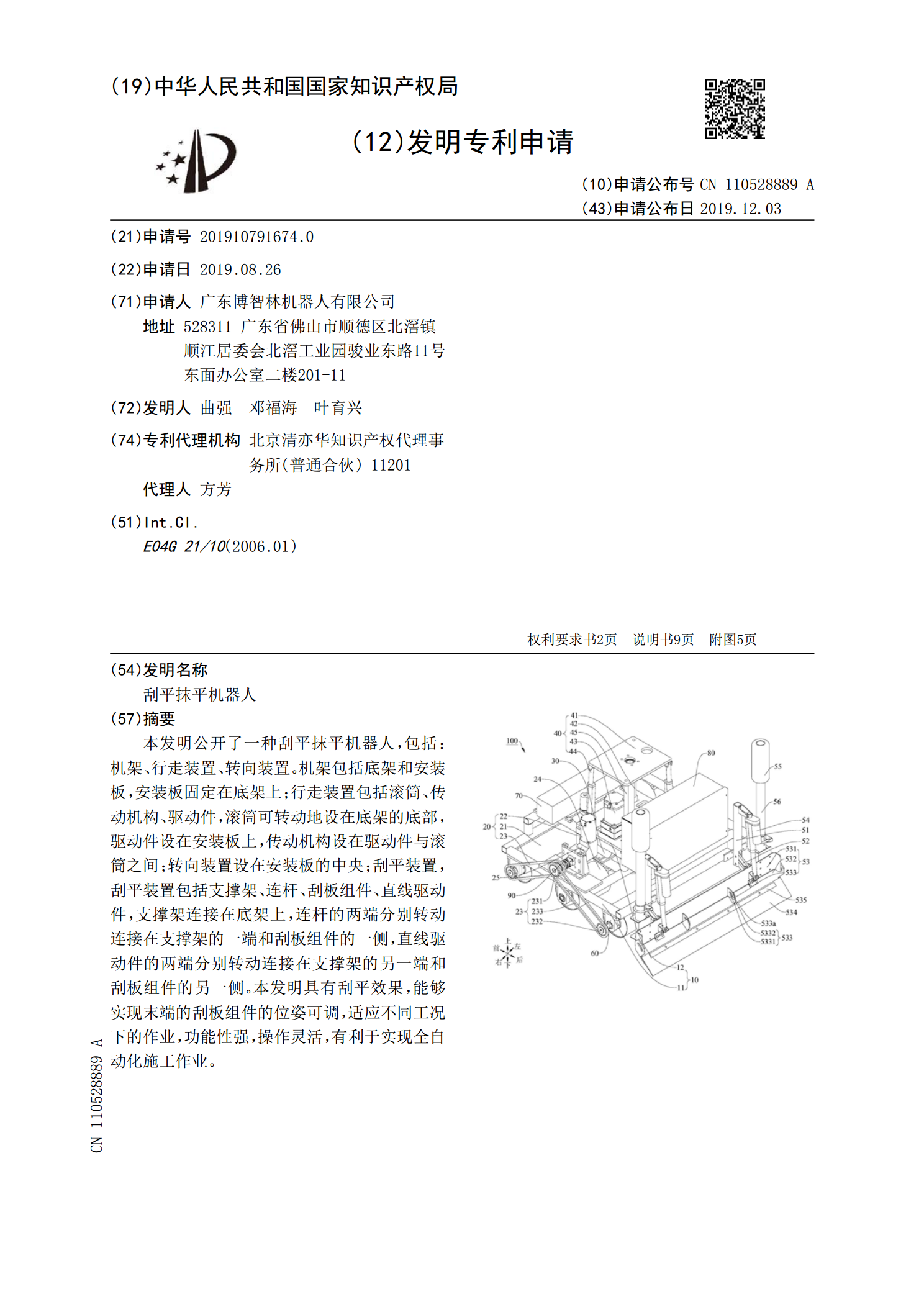
本发明公开了一种刮平抹平机器人,包括:机架、行走装置、转向装置。机架包括底架和安装板,安装板固定在底架上;行走装置包括滚筒、传动机构、驱动件,滚筒可转动地设在底架的底部,驱动件设在安装板上,传动机构设在驱动件与滚筒之间;转向装置设在安装板的中央;刮平装置,刮平装置包括支撑架、连杆、刮板组件、直线驱动件,支撑架连接在底架上,连杆的两端分别转动连接在支撑架的一端和刮板组件的一侧,直线驱动件的两端分别转动连接在支撑架的另一端和刮板组件的另一侧。本发明具有刮平效果,能够实现末端的刮板组件的位姿可调,适应不同工况下

建筑墙面砂浆刮平机器人.pdf
本发明涉及一种建筑墙面砂浆刮平机器人,属于建筑施工机械。本发明采用的技术方案是:建筑墙面砂浆刮平机器人,所述包括可移动的底盘,底盘上设竖向的主架,设有砂浆刮平装置的升降架设置在主架上并可沿主架上下升降,所述主架的顶部设有前伸定距装置;所述底盘的下侧面设有升降定位轮,所述主架的底端设有可伸缩的底部定位头,所述主架的顶部设有弹性定位头。

刮平机00.doc
内蒙古赤峰市松山区临河路北段第二标段施工安全技术交底施工单位:河南省地矿建设工程(集团)有限公司工程名称松山区临河路北段第二标段施工部位交底要求刮平机安全操作规范分项部位刮平机1凹凸相差较大地面时,应先用推土机推平,然后用武装警察刮平机平整。2作业区的水准点及导线控制桩的位置、数据必须清楚,放线验线工作应在之前基本完成。3检查并紧固各部连接螺栓及轮胎气压,离合器、操纵杆、变速杆均放在空档位置,检查传动系统、工作装置等应完好,液压系统油路、油缸、操纵阀等无泄漏现象。4确认机械周围无障碍物及行人时,应先鸣号,

双物料刮板输送机.pdf
一种双物料刮板输送机,包括机壳和驱动装置,在机壳内设有第一输送槽和第二输送槽,第一输送槽和第二输送槽之间设有隔离板,在第一输送槽和第二输送槽内均设有送料括板,送料括板与传动链条连接。在机壳两端分别设有两套头轮和尾轮,分别与第一输送槽和第二输送槽内送料括板上的传动链条相配合,传动链条与驱动装置连接。本发明提供的双物料刮板输送机,机壳采用双槽密封结构,机壳内的两个输送槽完全隔开,实现单机多物料同时输送,充分利用如隧道等处的狭小空间,提高了输送效率,降低了故障率、能耗和成本,且后期维修方便。