
局部球坐标系下的三维盲水印嵌入和提取检测方法及装置.pdf

一吃****海逸

1/10
2/10

3/10

4/10
5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共23页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

局部球坐标系下的三维盲水印嵌入和提取检测方法及装置.pdf
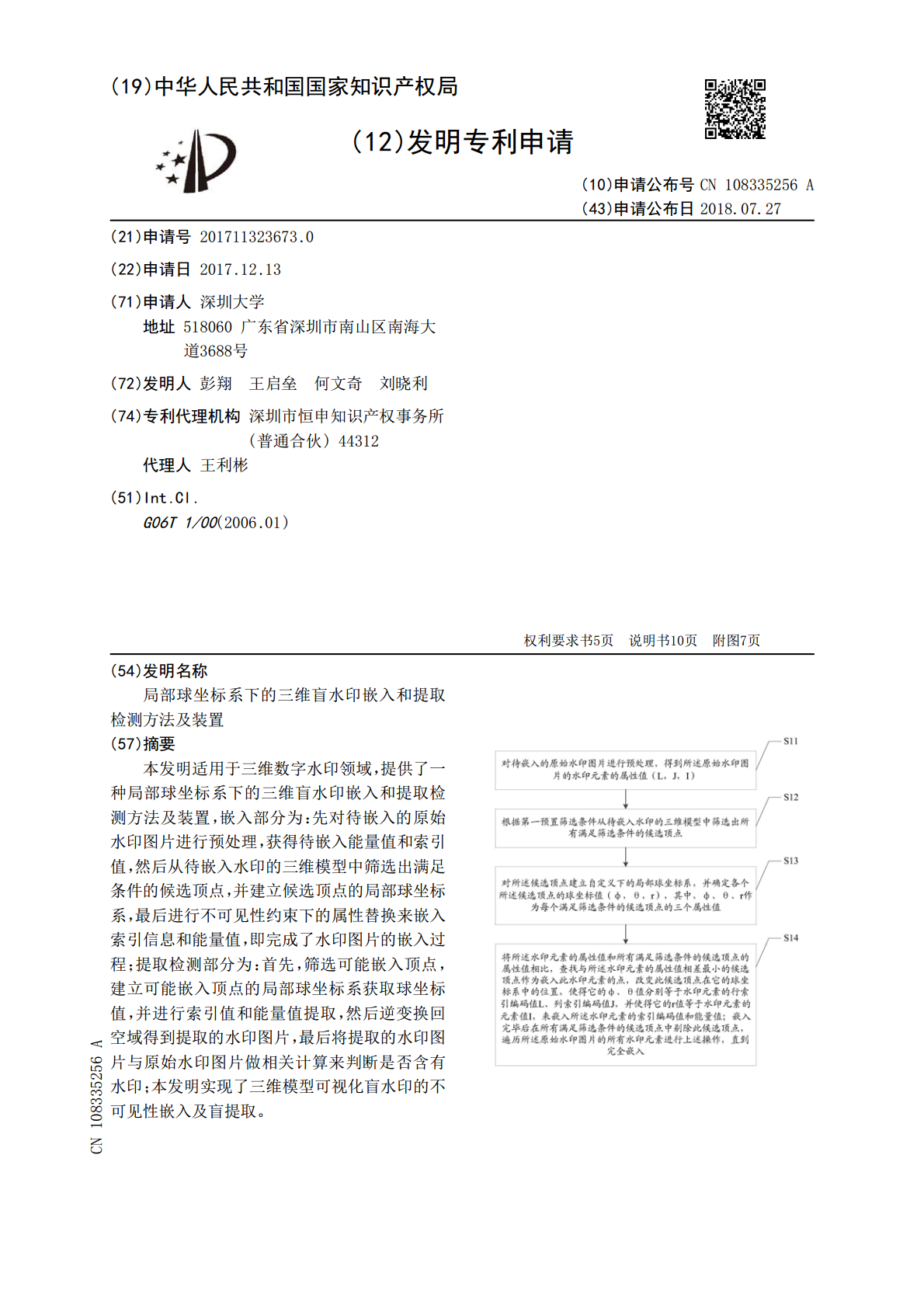
本发明适用于三维数字水印领域,提供了一种局部球坐标系下的三维盲水印嵌入和提取检测方法及装置,嵌入部分为:先对待嵌入的原始水印图片进行预处理,获得待嵌入能量值和索引值,然后从待嵌入水印的三维模型中筛选出满足条件的候选顶点,并建立候选顶点的局部球坐标系,最后进行不可见性约束下的属性替换来嵌入索引信息和能量值,即完成了水印图片的嵌入过程;提取检测部分为:首先,筛选可能嵌入顶点,建立可能嵌入顶点的局部球坐标系获取球坐标值,并进行索引值和能量值提取,然后逆变换回空域得到提取的水印图片,最后将提取的水印图片与原始水印
盲水印嵌入方法和装置、盲水印检测方法和装置.pdf
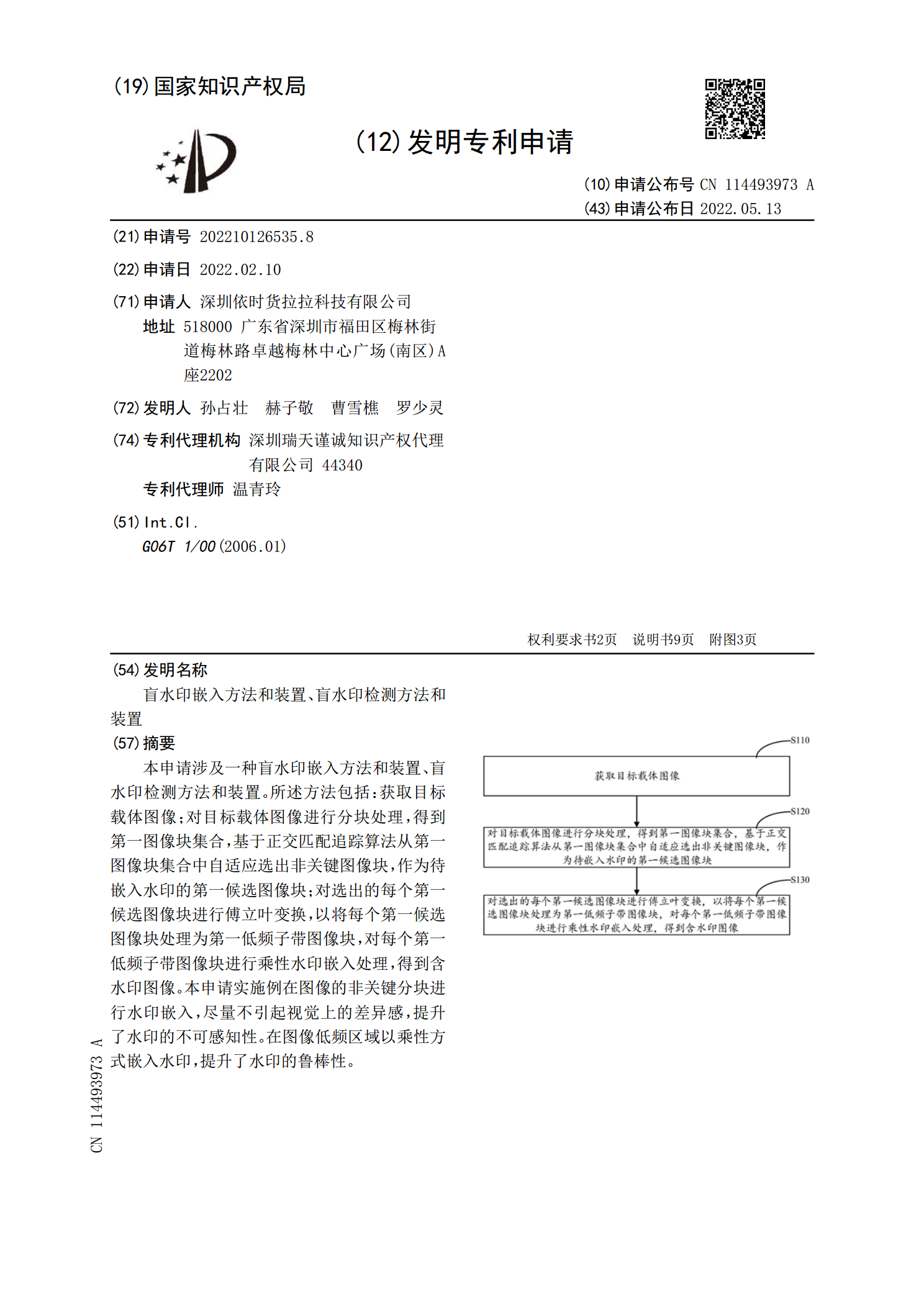
本申请涉及一种盲水印嵌入方法和装置、盲水印检测方法和装置。所述方法包括:获取目标载体图像;对目标载体图像进行分块处理,得到第一图像块集合,基于正交匹配追踪算法从第一图像块集合中自适应选出非关键图像块,作为待嵌入水印的第一候选图像块;对选出的每个第一候选图像块进行傅立叶变换,以将每个第一候选图像块处理为第一低频子带图像块,对每个第一低频子带图像块进行乘性水印嵌入处理,得到含水印图像。本申请实施例在图像的非关键分块进行水印嵌入,尽量不引起视觉上的差异感,提升了水印的不可感知性。在图像低频区域以乘性方式嵌入水印
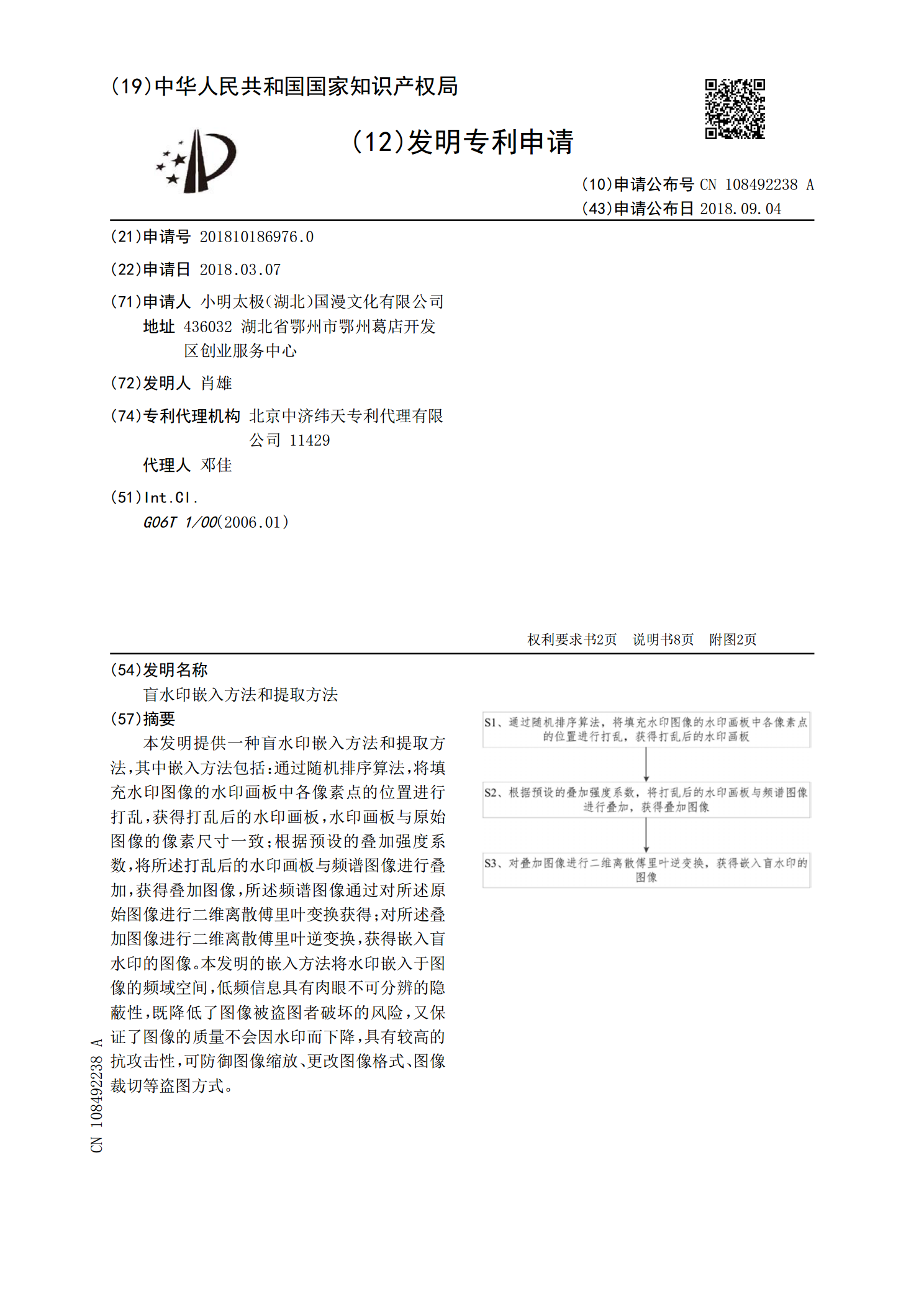
盲水印嵌入方法和提取方法.pdf
本发明提供一种盲水印嵌入方法和提取方法,其中嵌入方法包括:通过随机排序算法,将填充水印图像的水印画板中各像素点的位置进行打乱,获得打乱后的水印画板,水印画板与原始图像的像素尺寸一致;根据预设的叠加强度系数,将所述打乱后的水印画板与频谱图像进行叠加,获得叠加图像,所述频谱图像通过对所述原始图像进行二维离散傅里叶变换获得;对所述叠加图像进行二维离散傅里叶逆变换,获得嵌入盲水印的图像。本发明的嵌入方法将水印嵌入于图像的频域空间,低频信息具有肉眼不可分辨的隐蔽性,既降低了图像被盗图者破坏的风险,又保证了图像的质量
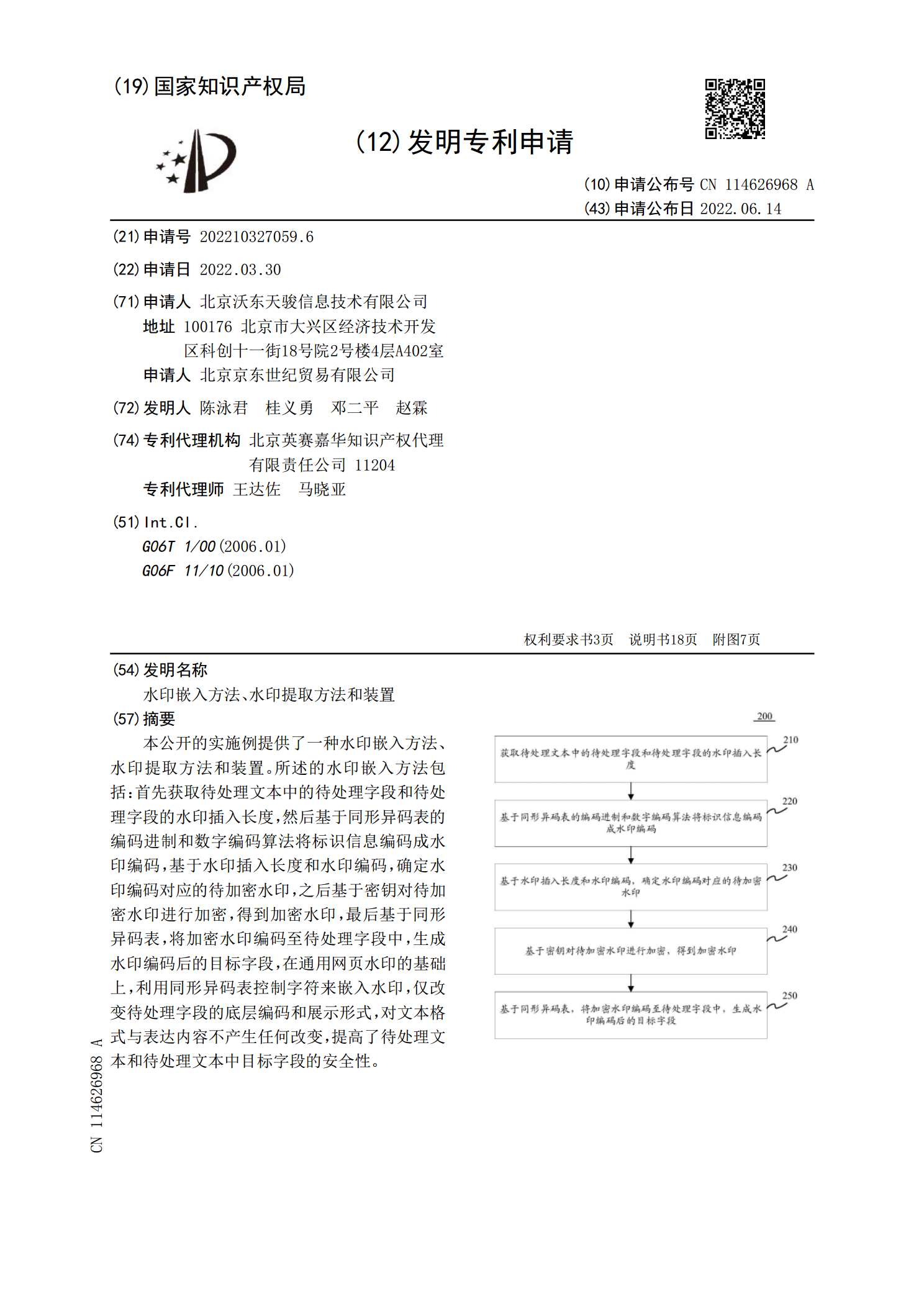
水印嵌入方法、水印提取方法和装置.pdf
本公开的实施例提供了一种水印嵌入方法、水印提取方法和装置。所述的水印嵌入方法包括:首先获取待处理文本中的待处理字段和待处理字段的水印插入长度,然后基于同形异码表的编码进制和数字编码算法将标识信息编码成水印编码,基于水印插入长度和水印编码,确定水印编码对应的待加密水印,之后基于密钥对待加密水印进行加密,得到加密水印,最后基于同形异码表,将加密水印编码至待处理字段中,生成水印编码后的目标字段,在通用网页水印的基础上,利用同形异码表控制字符来嵌入水印,仅改变待处理字段的底层编码和展示形式,对文本格式与表达内容不
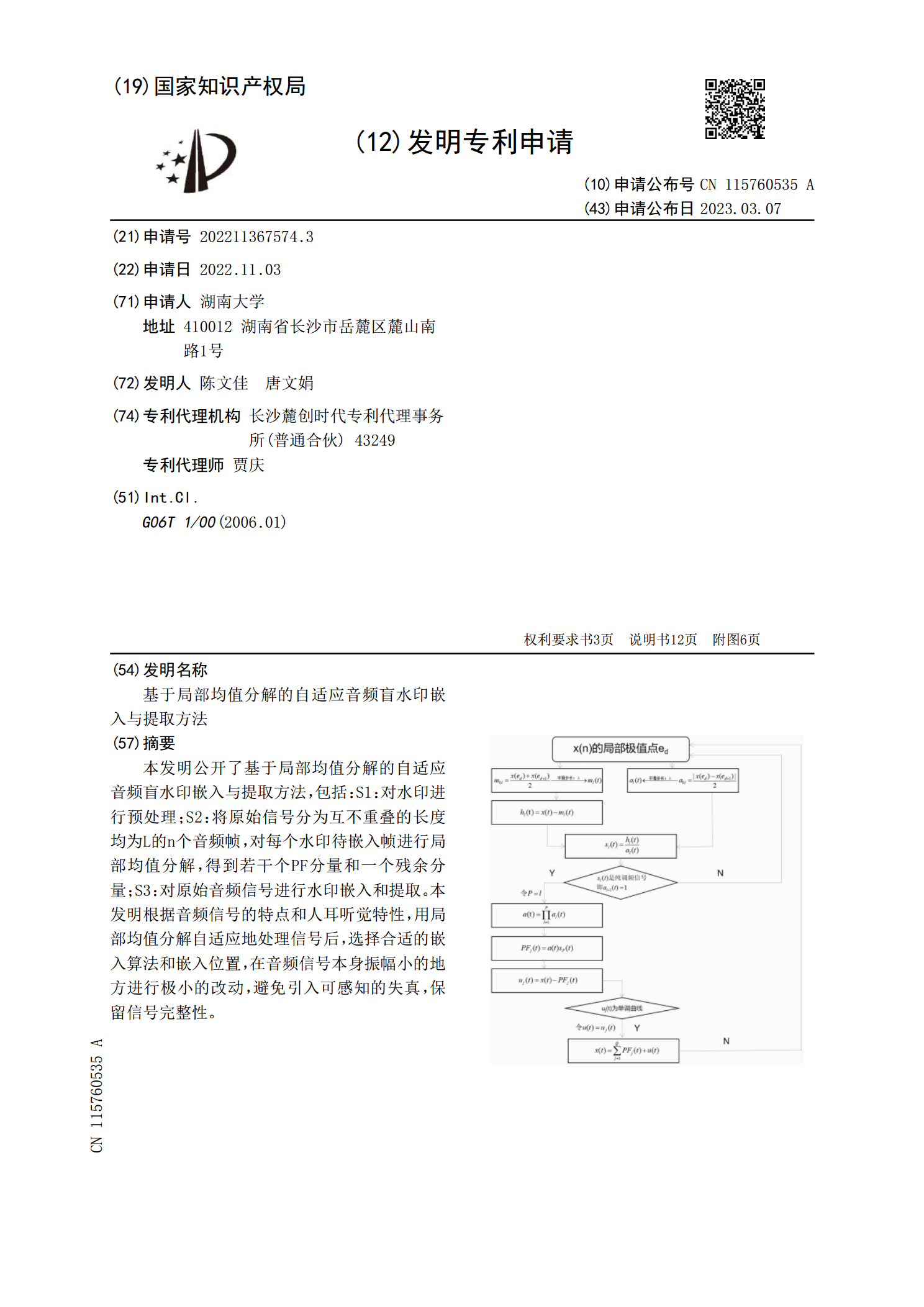
基于局部均值分解的自适应音频盲水印嵌入与提取方法.pdf
本发明公开了基于局部均值分解的自适应音频盲水印嵌入与提取方法,包括:S1:对水印进行预处理;S2:将原始信号分为互不重叠的长度均为L的n个音频帧,对每个水印待嵌入帧进行局部均值分解,得到若干个PF分量和一个残余分量;S3:对原始音频信号进行水印嵌入和提取。本发明根据音频信号的特点和人耳听觉特性,用局部均值分解自适应地处理信号后,选择合适的嵌入算法和嵌入位置,在音频信号本身振幅小的地方进行极小的改动,避免引入可感知的失真,保留信号完整性。