
一种盲人交通出行安全监控智能导航方法及系统.pdf

秀华****魔王

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10

9/10
10/10
亲,该文档总共21页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种盲人交通出行安全监控智能导航方法及系统.pdf
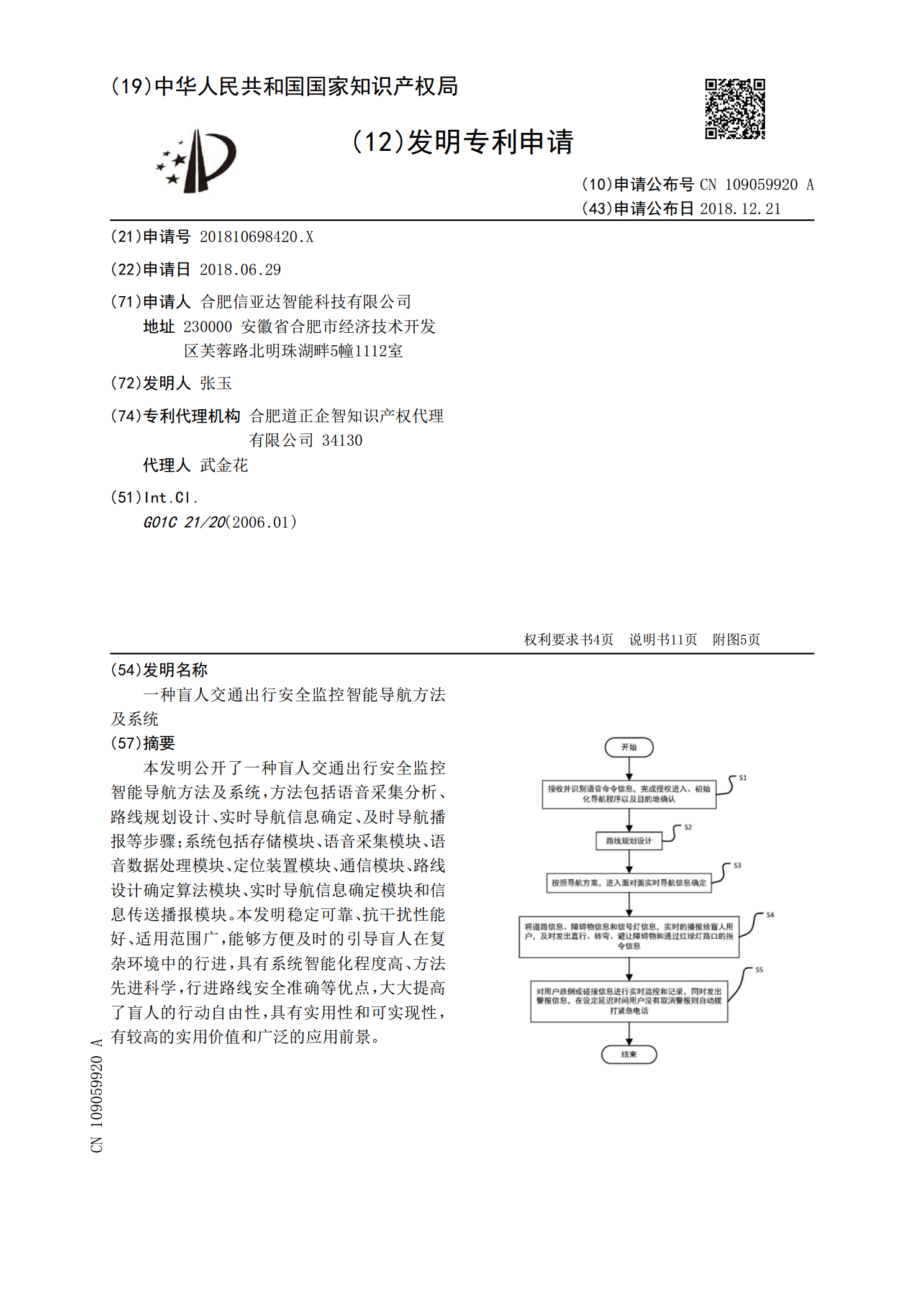
本发明公开了一种盲人交通出行安全监控智能导航方法及系统,方法包括语音采集分析、路线规划设计、实时导航信息确定、及时导航播报等步骤;系统包括存储模块、语音采集模块、语音数据处理模块、定位装置模块、通信模块、路线设计确定算法模块、实时导航信息确定模块和信息传送播报模块。本发明稳定可靠、抗干扰性能好、适用范围广,能够方便及时的引导盲人在复杂环境中的行进,具有系统智能化程度高、方法先进科学,行进路线安全准确等优点,大大提高了盲人的行动自由性,具有实用性和可实现性,有较高的实用价值和广泛的应用前景。
一种盲人出行智能导航系统及方法.pdf
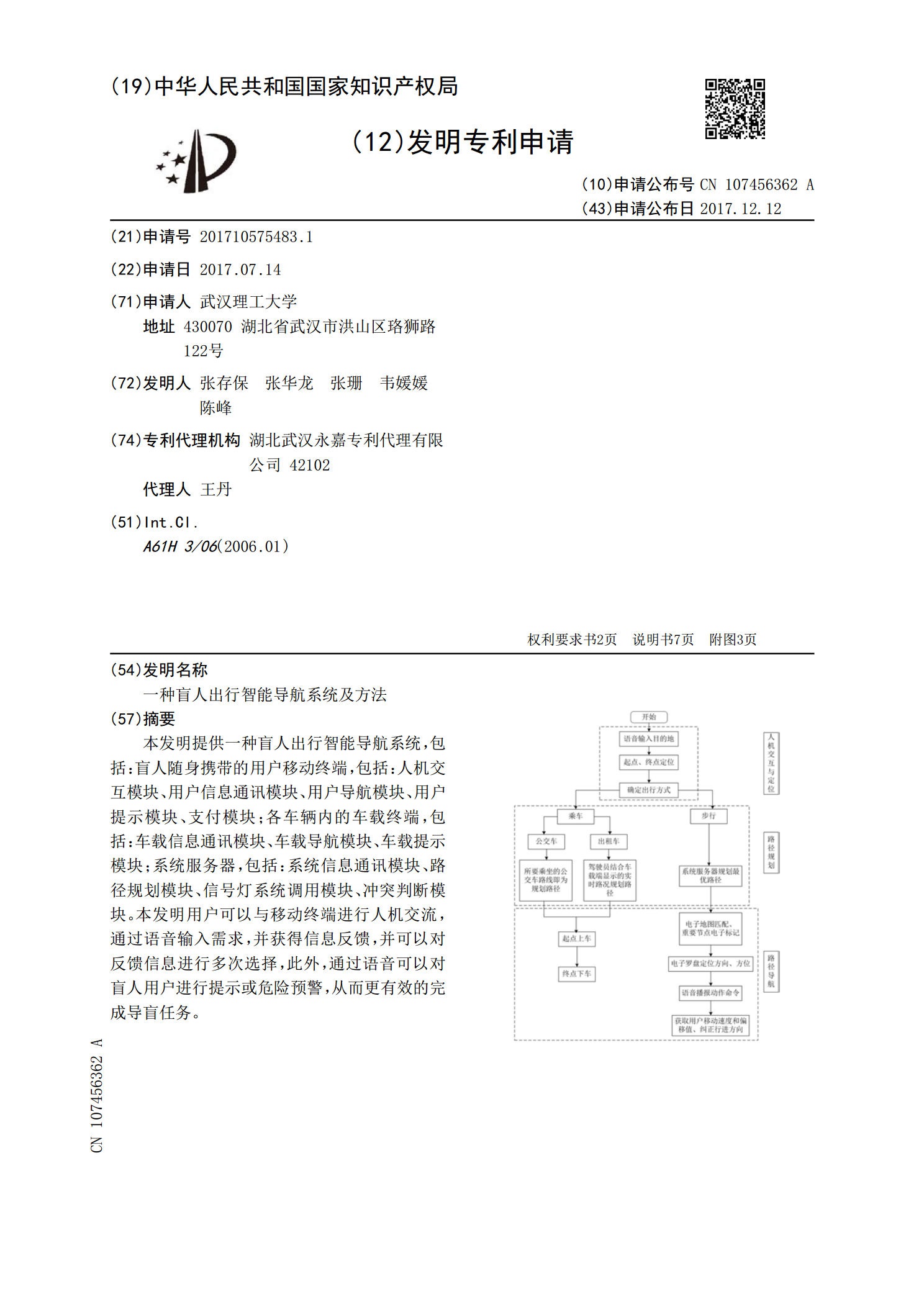
本发明提供一种盲人出行智能导航系统,包括:盲人随身携带的用户移动终端,包括:人机交互模块、用户信息通讯模块、用户导航模块、用户提示模块、支付模块;各车辆内的车载终端,包括:车载信息通讯模块、车载导航模块、车载提示模块;系统服务器,包括:系统信息通讯模块、路径规划模块、信号灯系统调用模块、冲突判断模块。本发明用户可以与移动终端进行人机交流,通过语音输入需求,并获得信息反馈,并可以对反馈信息进行多次选择,此外,通过语音可以对盲人用户进行提示或危险预警,从而更有效的完成导盲任务。
一种盲人智能导航避障出行辅助方法及系统.pdf
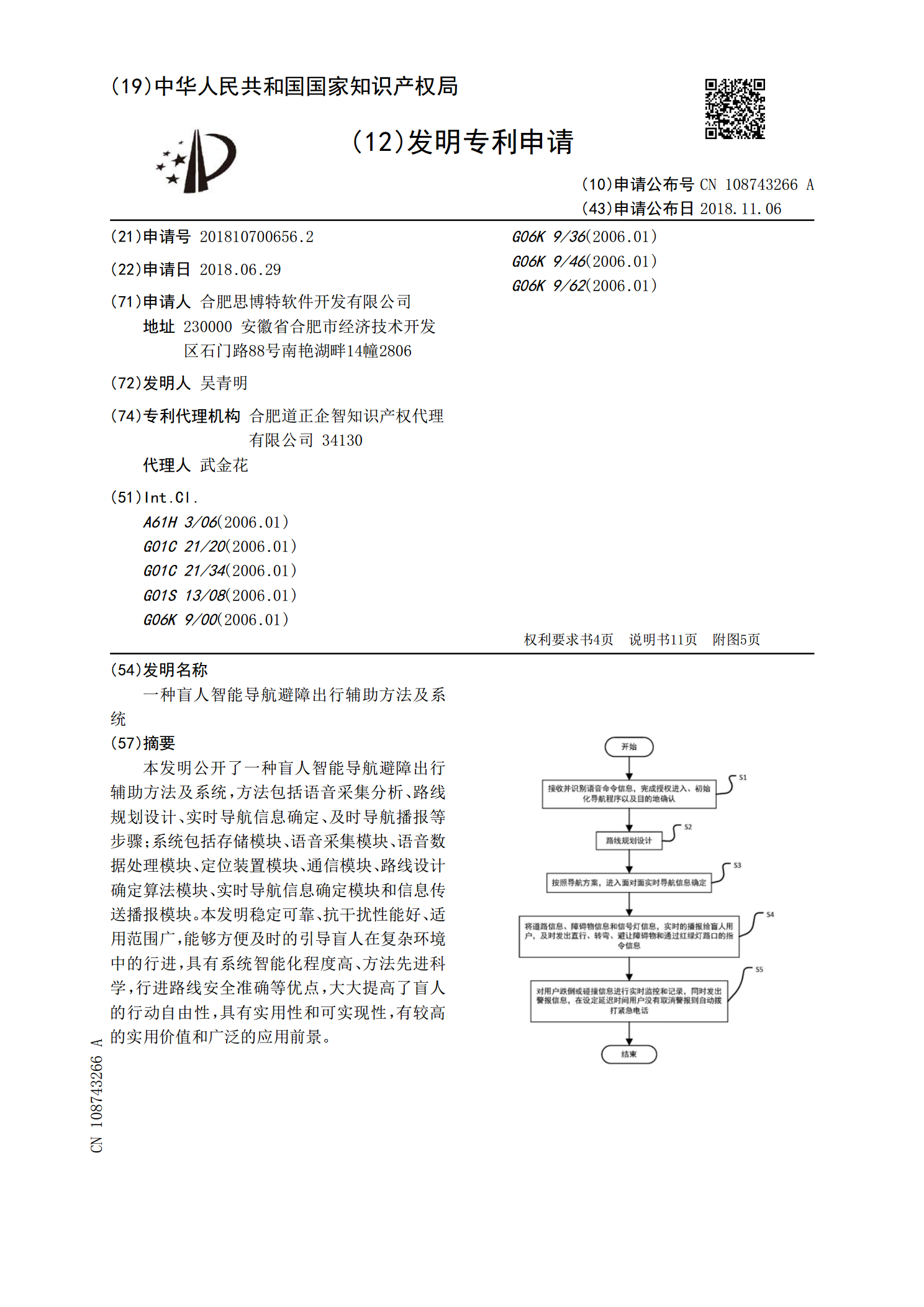
本发明公开了一种盲人智能导航避障出行辅助方法及系统,方法包括语音采集分析、路线规划设计、实时导航信息确定、及时导航播报等步骤;系统包括存储模块、语音采集模块、语音数据处理模块、定位装置模块、通信模块、路线设计确定算法模块、实时导航信息确定模块和信息传送播报模块。本发明稳定可靠、抗干扰性能好、适用范围广,能够方便及时的引导盲人在复杂环境中的行进,具有系统智能化程度高、方法先进科学,行进路线安全准确等优点,大大提高了盲人的行动自由性,具有实用性和可实现性,有较高的实用价值和广泛的应用前景。
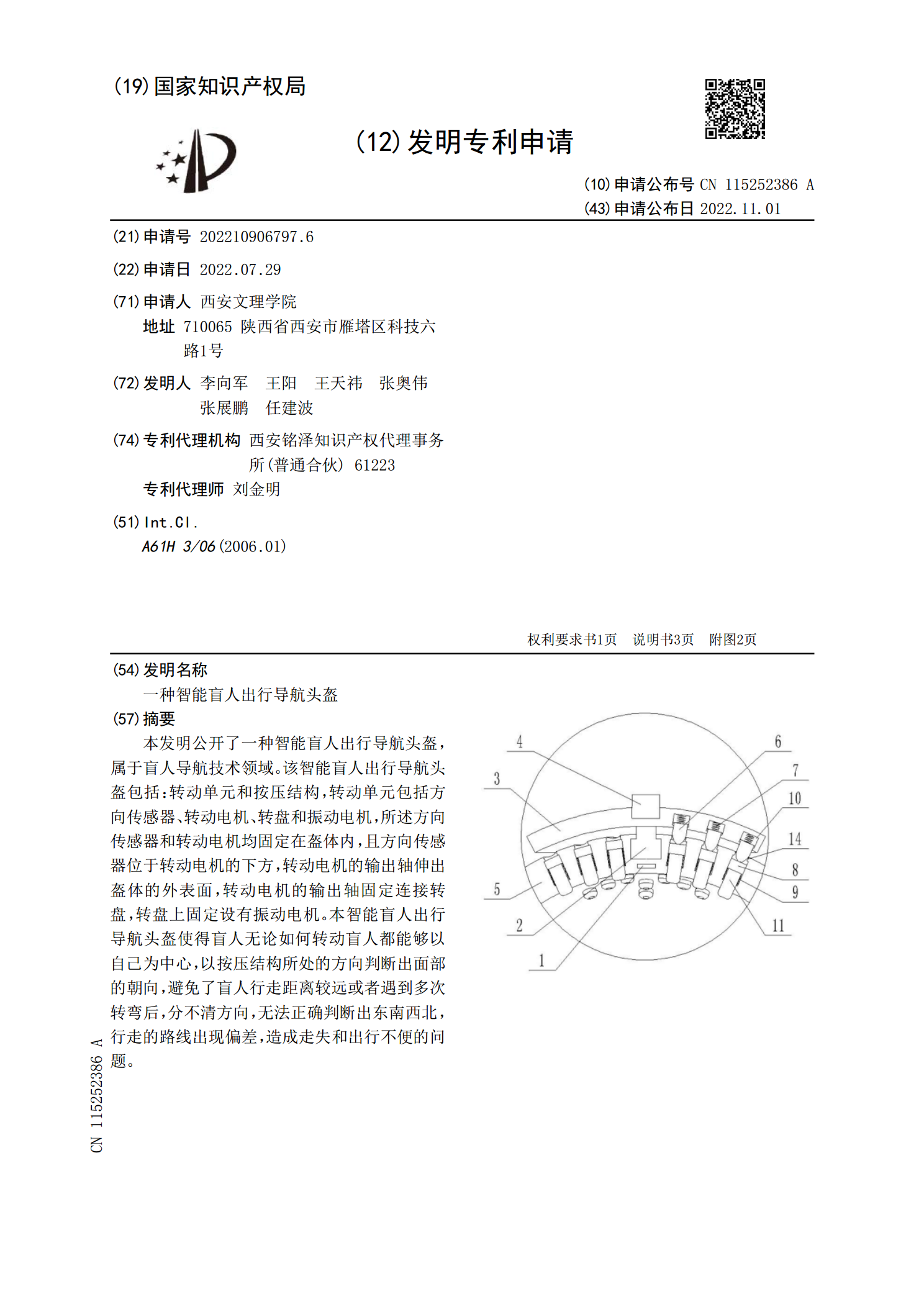
一种智能盲人出行导航头盔.pdf
本发明公开了一种智能盲人出行导航头盔,属于盲人导航技术领域。该智能盲人出行导航头盔包括:转动单元和按压结构,转动单元包括方向传感器、转动电机、转盘和振动电机,所述方向传感器和转动电机均固定在盔体内,且方向传感器位于转动电机的下方,转动电机的输出轴伸出盔体的外表面,转动电机的输出轴固定连接转盘,转盘上固定设有振动电机。本智能盲人出行导航头盔使得盲人无论如何转动盲人都能够以自己为中心,以按压结构所处的方向判断出面部的朝向,避免了盲人行走距离较远或者遇到多次转弯后,分不清方向,无法正确判断出东南西北,行走的路线
一种智能盲人出行导航头盔.pdf
本发明涉及一种智能盲人出行导航头盔,包括头盔主体,头盔主体由头盔佩戴环、弧形顶部支撑和前额部安装架组成,头盔佩戴环为圆形或椭圆形环状结构,弧形顶部支撑的两端连接在头盔佩戴环上,前额部安装架上端固定于头盔佩戴环前部下端面,前额部安装架内侧为弧面;头盔佩戴环两侧固定有耳机、麦克风和震动传感器;前额部安装架前侧面固定有双目摄像头,前额部安装架顶面固定有红外测距传感器;弧形顶部支撑顶部安装处理器和GPS接收天线。本发明的盲人导航头盔集成影像探路、测距探路、导航定位、路线指引、语音提示、物体识别及震动警示等多项功能