
一种基于特征矩阵联合对角化的多目标主瓣抗干扰方法.pdf

努力****幻翠

1/10

2/10
3/10

4/10

5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于特征矩阵联合对角化的多目标主瓣抗干扰方法.pdf
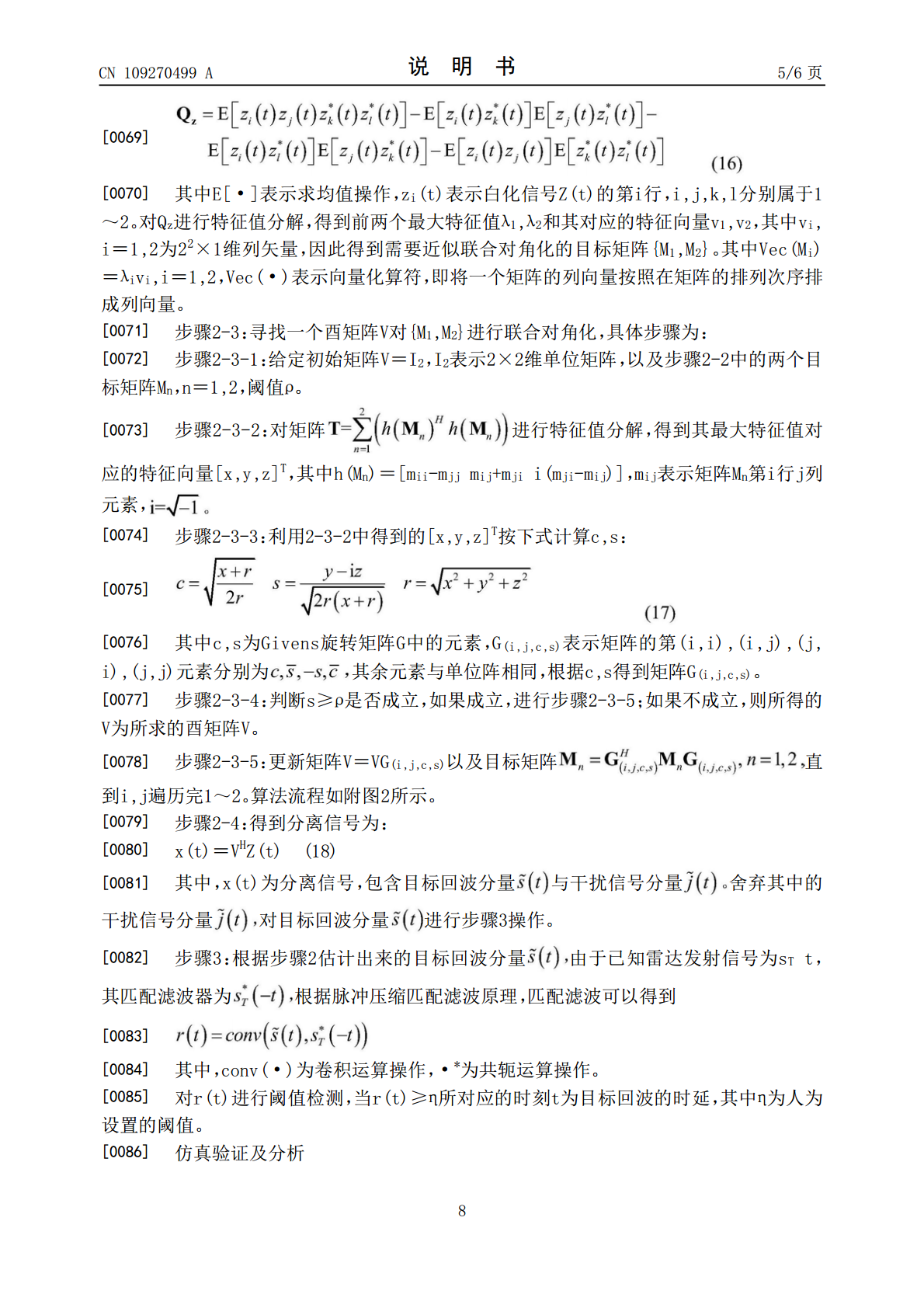
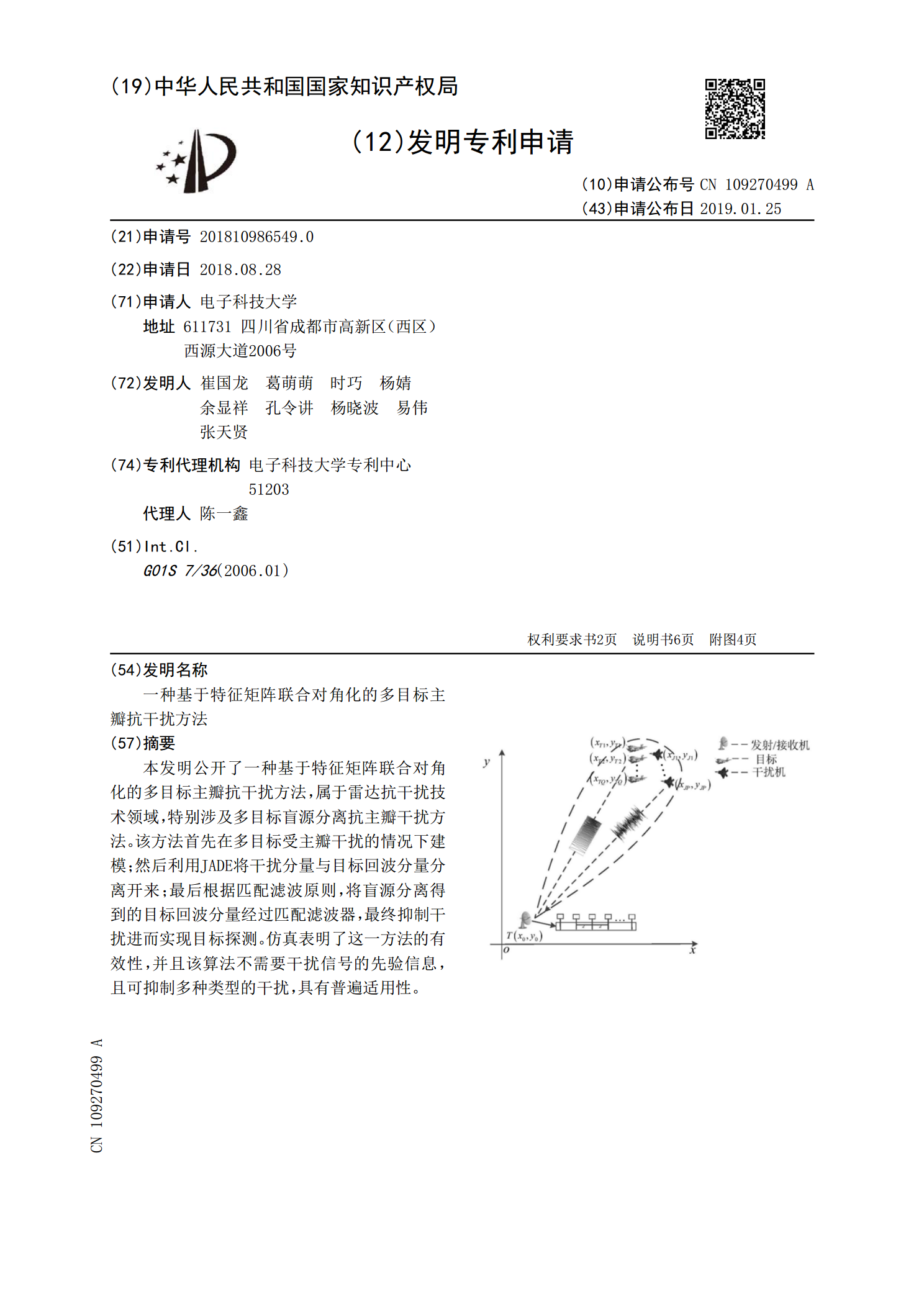
本发明公开了一种基于特征矩阵联合对角化的多目标主瓣抗干扰方法,属于雷达抗干扰技术领域,特别涉及多目标盲源分离抗主瓣干扰方法。该方法首先在多目标受主瓣干扰的情况下建模;然后利用JADE将干扰分量与目标回波分量分离开来;最后根据匹配滤波原则,将盲源分离得到的目标回波分量经过匹配滤波器,最终抑制干扰进而实现目标探测。仿真表明了这一方法的有效性,并且该算法不需要干扰信号的先验信息,且可抑制多种类型的干扰,具有普遍适用性。

一种联合JADE和CLEAN的主瓣抗干扰方法.pdf
本发明公开了一种联合JADE和CLEAN的主瓣抗干扰方法,属于雷达抗干扰技术领域,特别涉及盲源分离抗主瓣干扰技术。本发明首先利用JADE算法估计出干扰信号的导向矢量和波形,进而重构出干扰阵列信号;然后计算重构得到的干扰阵列信号的MUSIC谱,得到仅包含干扰信号的MUSIC谱;最后在空域上利用CLEAN算法将干扰信号的MUSIC谱在接收信号的MUSIC谱上对消,从而得到目标信号的波达方向估计。仿真结果表明,本方法可以很好的完成干扰抑制,并将目标DOA估计出来。
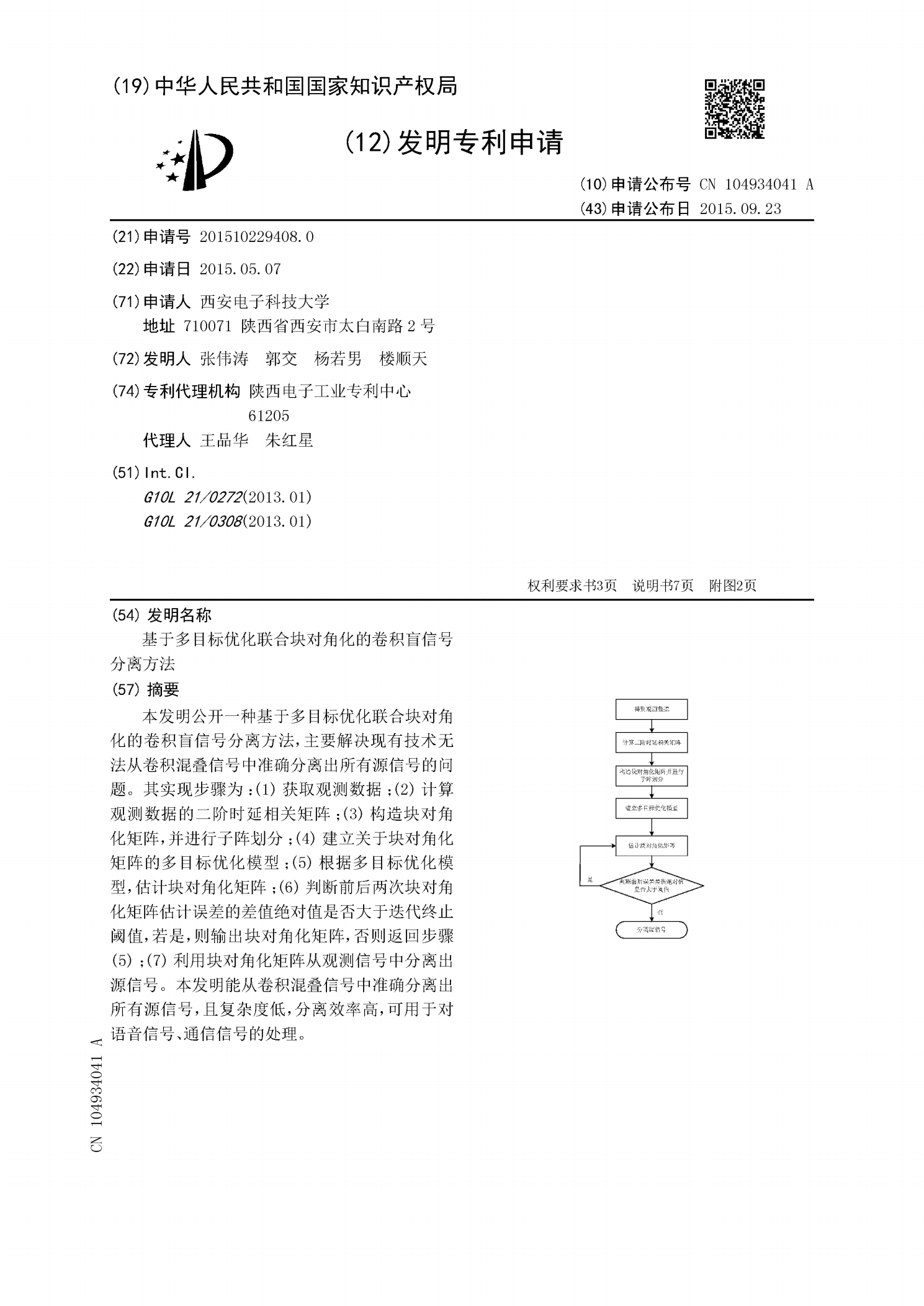
基于多目标优化联合块对角化的卷积盲信号分离方法.pdf
本发明公开一种基于多目标优化联合块对角化的卷积盲信号分离方法,主要解决现有技术无法从卷积混叠信号中准确分离出所有源信号的问题。其实现步骤为:(1)获取观测数据;(2)计算观测数据的二阶时延相关矩阵;(3)构造块对角化矩阵,并进行子阵划分;(4)建立关于块对角化矩阵的多目标优化模型;(5)根据多目标优化模型,估计块对角化矩阵;(6)判断前后两次块对角化矩阵估计误差的差值绝对值是否大于迭代终止阈值,若是,则输出块对角化矩阵,否则返回步骤(5);(7)利用块对角化矩阵从观测信号中分离出源信号。本发明能从卷积混叠

将可对角化矩阵进行对角化的一种简洁方法.docx
将可对角化矩阵进行对角化的一种简洁方法简洁方法:约当标准型引言:在线性代数中,可对角化矩阵是一类特殊的矩阵,它可以通过合适的相似变换变为对角矩阵,对角矩阵的主对角线上的元素即是矩阵的特征值。一般地,通过求解特征向量矩阵和相似矩阵的逆矩阵,我们可以对可对角化矩阵进行对角化。然而,在某些情况下,求解特征向量矩阵和逆矩阵并不是一种十分方便的方法,特别当矩阵具有复杂的特征结构时。本论文将介绍一种简洁而高效的方法,即约当标准型,来对可对角化矩阵进行对角化。第一部分:可对角化矩阵的定义与性质1.1可对角化矩阵的定义1
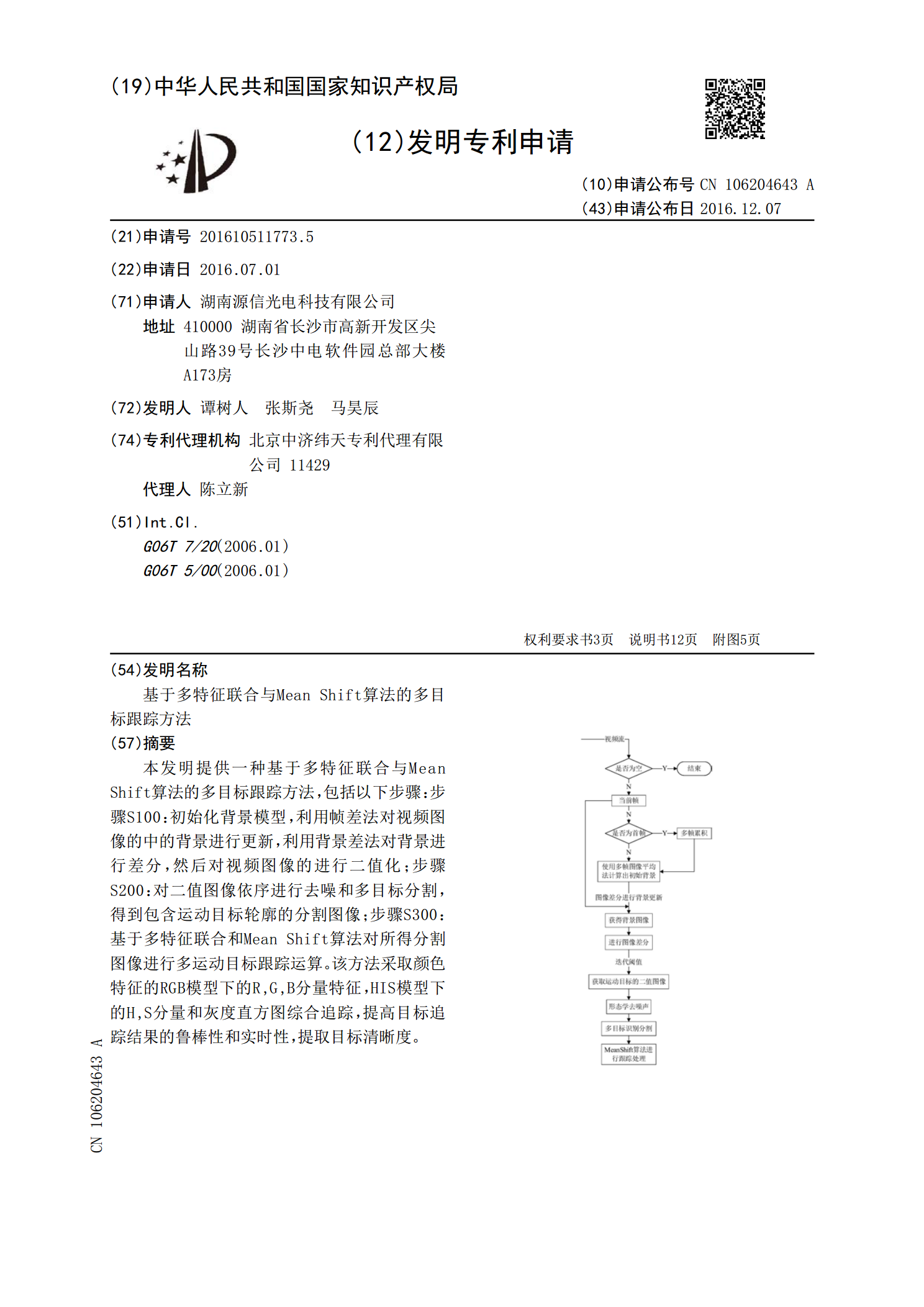
基于多特征联合与Mean Shift算法的多目标跟踪方法.pdf
本发明提供一种基于多特征联合与MeanShift算法的多目标跟踪方法,包括以下步骤:步骤S100:初始化背景模型,利用帧差法对视频图像的中的背景进行更新,利用背景差法对背景进行差分,然后对视频图像的进行二值化;步骤S200:对二值图像依序进行去噪和多目标分割,得到包含运动目标轮廓的分割图像;步骤S300:基于多特征联合和MeanShift算法对所得分割图像进行多运动目标跟踪运算。该方法采取颜色特征的RGB模型下的R,G,B分量特征,HIS模型下的H,S分量和灰度直方图综合追踪,提高目标追踪结果的鲁棒性