
车辆盲区侦测方法.pdf

灵波****ng


1/10

2/10

3/10
4/10
5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

车辆盲区侦测方法.pdf
一种车辆盲区侦测方法,适用于耦接配置于车辆上的一或多个摄影机的电子装置,该方法包括:在该摄影机所取得的当前帧画面中设立捕获区域,并对进入该捕获区域的物体进行侦测,将符合捕获条件的该物体与该物体的位置信息被加入跟踪列表中;对在早于该当前帧画面的一至多个先前帧画面中加入该跟踪列表的既存物体进行跟踪运算以得到该既存物体在该当前帧画面中的新位置信息,并根据该既存物体的该新位置信息与该侦测范围判定是否继续将该既存物体保留在该跟踪列表中;以及依据该跟踪列表中保留的所有物体在该当前帧画面中的位置信息做出警示判断。本发明

车辆盲区侦测方法及装置.pdf
本发明实施例提供的车辆盲区侦测方法及装置,所述方法包括:实时获取预设的盲区区域的热像数据,对所述热像数据进行识别处理,获得每一帧图像的障碍特征;根据所述障碍特征确定是否发出报警信号。本发明实施例提供的车辆盲区侦测方法及装置,通过实时获取预设的盲区区域的热像数据,对所述热像数据进行识别处理,获得每一帧图像的障碍特征;根据所述障碍特征确定是否发出报警信号,实现对盲区区域内行人的侦测识别,避免出现安全事故。
一种车辆盲区侦测装置及其侦测方法.pdf
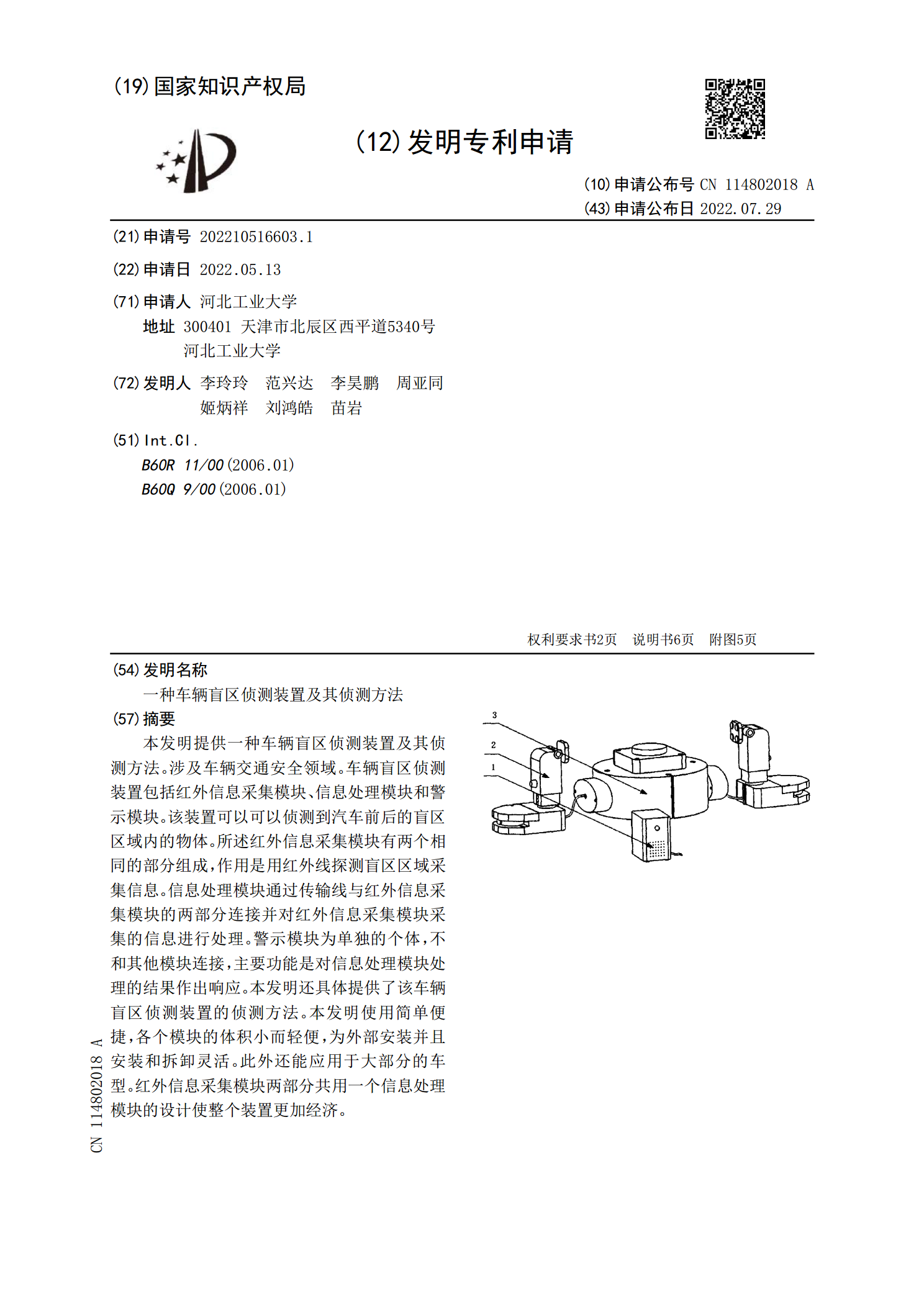
本发明提供一种车辆盲区侦测装置及其侦测方法。涉及车辆交通安全领域。车辆盲区侦测装置包括红外信息采集模块、信息处理模块和警示模块。该装置可以可以侦测到汽车前后的盲区区域内的物体。所述红外信息采集模块有两个相同的部分组成,作用是用红外线探测盲区区域采集信息。信息处理模块通过传输线与红外信息采集模块的两部分连接并对红外信息采集模块采集的信息进行处理。警示模块为单独的个体,不和其他模块连接,主要功能是对信息处理模块处理的结果作出响应。本发明还具体提供了该车辆盲区侦测装置的侦测方法。本发明使用简单便捷,各个模块的体

车辆盲区侦测系统.pdf
本发明提供一种车辆盲区侦测系统,适用于一车辆,该车辆盲区侦测系统包含有一盲区侦测装置、一控制器及一警示装置;该盲区侦测装置包含有一测距单元,该测距单元于一侦测范围内侦测一物体与该车辆的一横向相对距离及一直向相对距离;该控制器电连接该盲区侦测装置,该控制器根据该横向相对距离计算产生一横向危险参数,以及根据该直向相对距离计算产生一直向危险参数,并将该横向危险参数及该直向危险参数加总产生一危险等级总分,该控制器根据该危险等级总分判断是否产生一警示讯号;该警示装置电连接该控制器,该警示装置根据该警示讯号进行示警。
盲区侦测系统及其盲区侦测方法.pdf
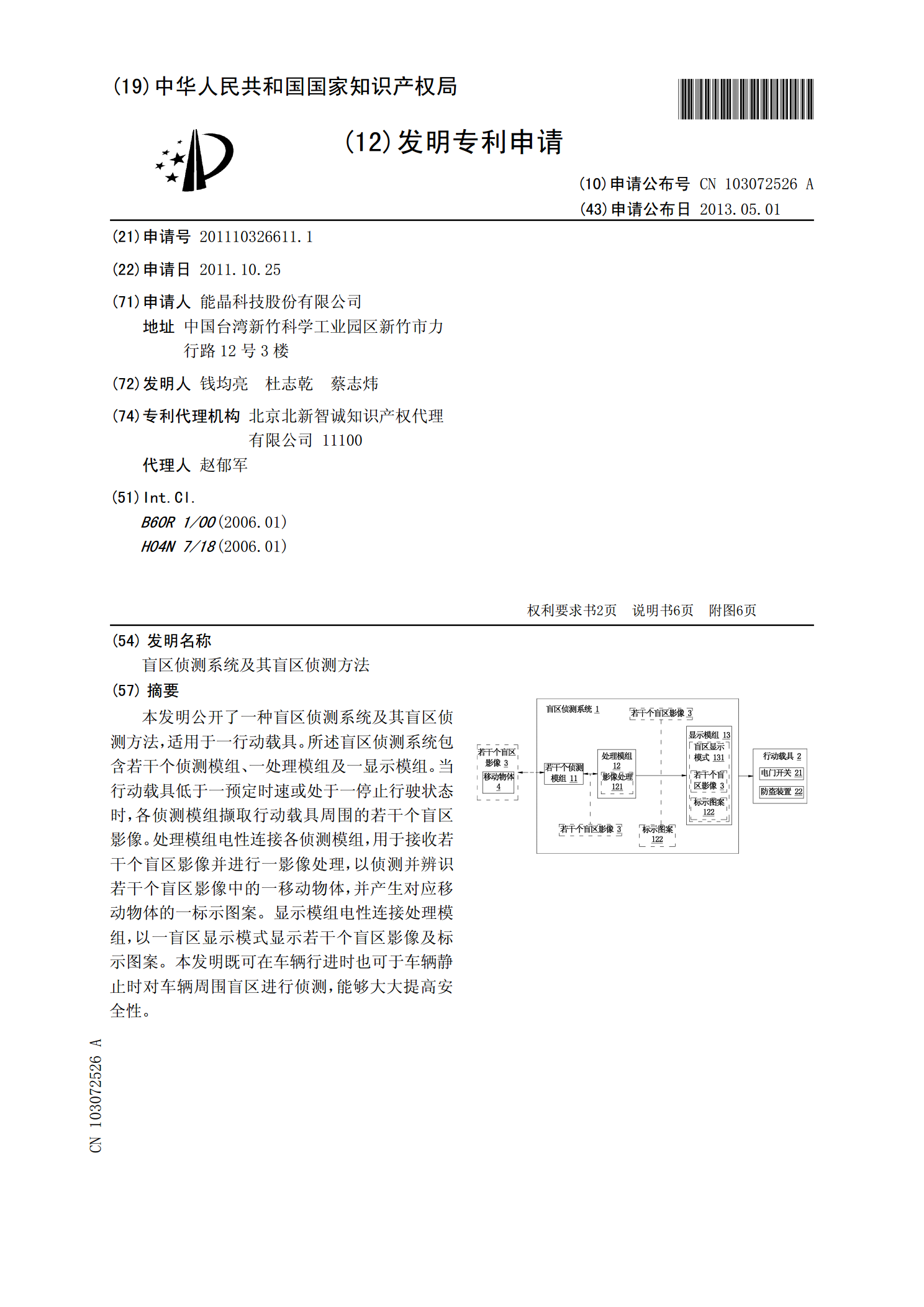
本发明公开了一种盲区侦测系统及其盲区侦测方法,适用于一行动载具。所述盲区侦测系统包含若干个侦测模组、一处理模组及一显示模组。当行动载具低于一预定时速或处于一停止行驶状态时,各侦测模组撷取行动载具周围的若干个盲区影像。处理模组电性连接各侦测模组,用于接收若干个盲区影像并进行一影像处理,以侦测并辨识若干个盲区影像中的一移动物体,并产生对应移动物体的一标示图案。显示模组电性连接处理模组,以一盲区显示模式显示若干个盲区影像及标示图案。本发明既可在车辆行进时也可于车辆静止时对车辆周围盲区进行侦测,能够大大提高安全性