
一种管道清洗机器人.pdf

小长****6淑


1/10
2/10

3/10

4/10
5/10

6/10
7/10
8/10

9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种管道清洗机器人.pdf
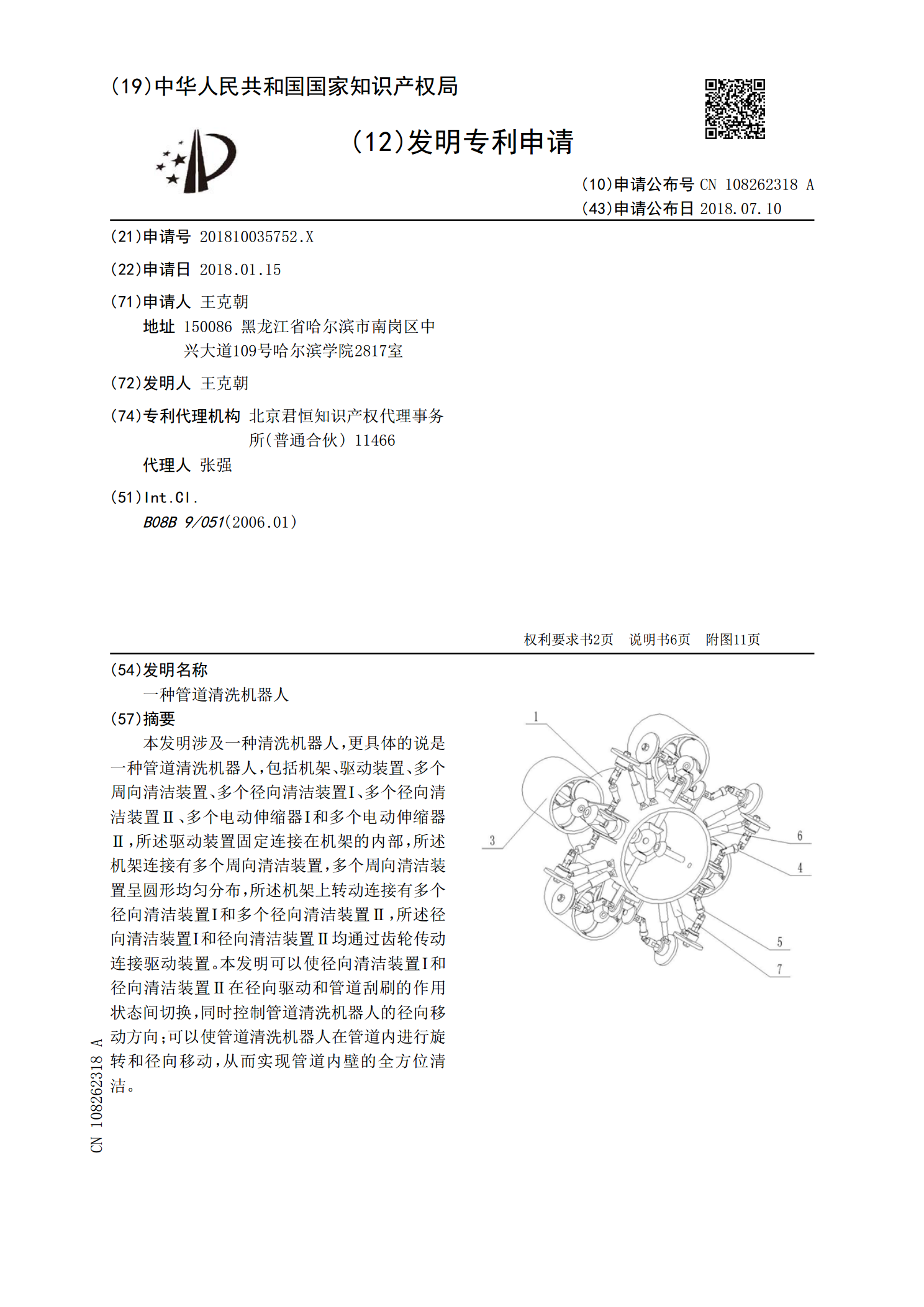
本发明涉及一种清洗机器人,更具体的说是一种管道清洗机器人,包括机架、驱动装置、多个周向清洁装置、多个径向清洁装置Ⅰ、多个径向清洁装置Ⅱ、多个电动伸缩器Ⅰ和多个电动伸缩器Ⅱ,所述驱动装置固定连接在机架的内部,所述机架连接有多个周向清洁装置,多个周向清洁装置呈圆形均匀分布,所述机架上转动连接有多个径向清洁装置Ⅰ和多个径向清洁装置Ⅱ,所述径向清洁装置Ⅰ和径向清洁装置Ⅱ均通过齿轮传动连接驱动装置。本发明可以使径向清洁装置Ⅰ和径向清洁装置Ⅱ在径向驱动和管道刮刷的作用状态间切换,同时控制管道清洗机器人的径向移动方向;

一种管道清洗机器人.pdf
本发明公开了一种管道清洗机器人,包括机壳、清洁机构、压轮机构、翻转移动机构、蓄电池和控制器,所述机壳倒角处设有第一万向轮,机壳内设有清洁室、蓄水室、翻转移动驱动室、控制室、第一压轮室和第二压轮室,所述清洁机构包括第一旋转电机、第一转轴、毛刷筒、刷毛、蓄水箱、水泵、抽水管、喷水管、喷头,所述翻转移动机构包括轴承座、步进电机、回转轴承、回转杆、第一从动皮带轮、第一主动皮带轮、第一传动皮带、回转盘、第三电动推杆、第三导向套管、第三推杆、第三导向杆、第三推板、支架、第二旋转电机、第二转轴、防滑轮、第二从动皮带轮、

一种管道清洗机器人.pdf
本申请提供一种管道清洗机器人,包括机身;机身上分别设有图像采集组件、管道清扫组件、行走组件和平衡组件;图像采集组件和管道清扫组件分别位于机身沿运动方向的两端处;行走机构和平衡机构分别设有多个,绕机身均匀排布。根据本申请实施例提供的技术方案,通过在机身的前端设置图像采集组件,可实时观察管道内的情况,配合尾端的管道清扫组件可进行有针对性的清扫,相较于现有技术的盲目清扫,不仅节省了资源,还提高了清扫质量。

一种管道清洗机器人.pdf
本发明提供了一种管道清洗机器人,属于机械技术领域。本管道清洗机器人,包括本体,本体的两侧均设有凹腔,凹腔内设有能够带动本体在管道内来回运动的驱动机构,本体内部的上端设有安装腔一,本体上端转动设有转轴一,转轴一的上端固连有转盘一,安装腔一中设有清洁剂输送泵以及能够驱动转轴一转动的驱动件一,本体上端还设有圆管一,圆管一的外壁上设有若干个喷嘴一,本体中设有用于存储清洁剂的储存腔一,喷嘴一通过清洁剂输送泵和储存腔一连通,转盘一的周向均匀设有若干个盲孔一,盲孔一中滑动设有连接杆一,连接杆一的一端延伸出盲孔一并且端部

一种管道清洗机器人.pdf
本发明涉及管道清洗技术领域,且公开了一种管道清洗机器人。该管道清洗机器人,包括底座、驱动电机、升降机构和行走机构,所述底座的两侧与行走机构的外壁固定连接,所述底座的顶部与升降机构的底部固定连接,所述驱动电机的外壁与电机腔的内壁固定连接。该管道清洗机器人,在使用时,通过将该管道清洗机器人放置到需要清洗的管道中,通过设置的升降机构,并在升降机构上设置液压缸工作,带动液压座工作,通过设置的液压座使液压杆升降,转动电机工作,带动转动轴转动,通过转动轴转动带动设置在其右端的毛刷轴转动,通过在毛刷轴上设置有毛刷,并带