
一种基于视觉和盲源分离的振动检测方法.pdf

Wi****m7

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于视觉和盲源分离的振动检测方法.pdf
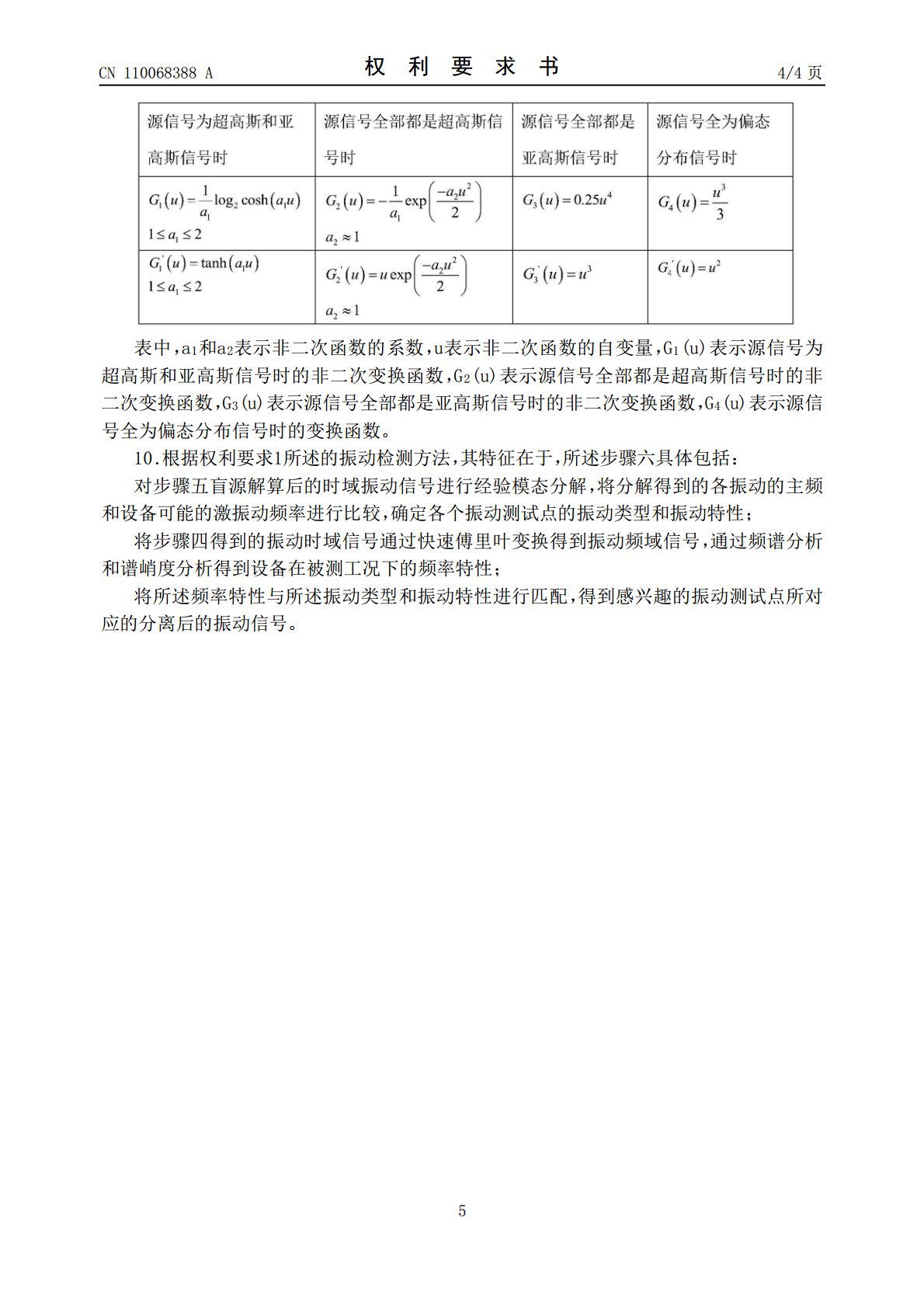
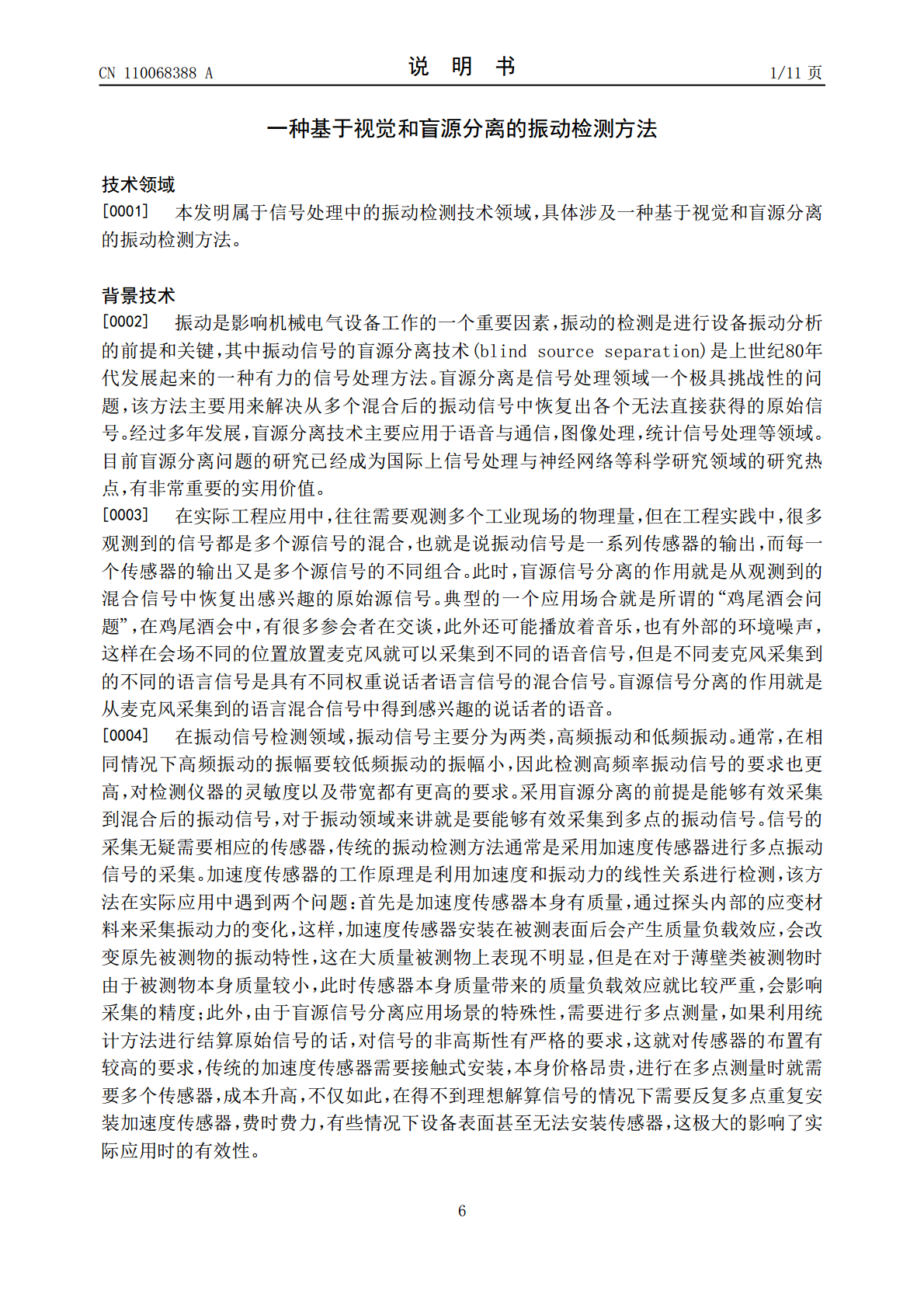
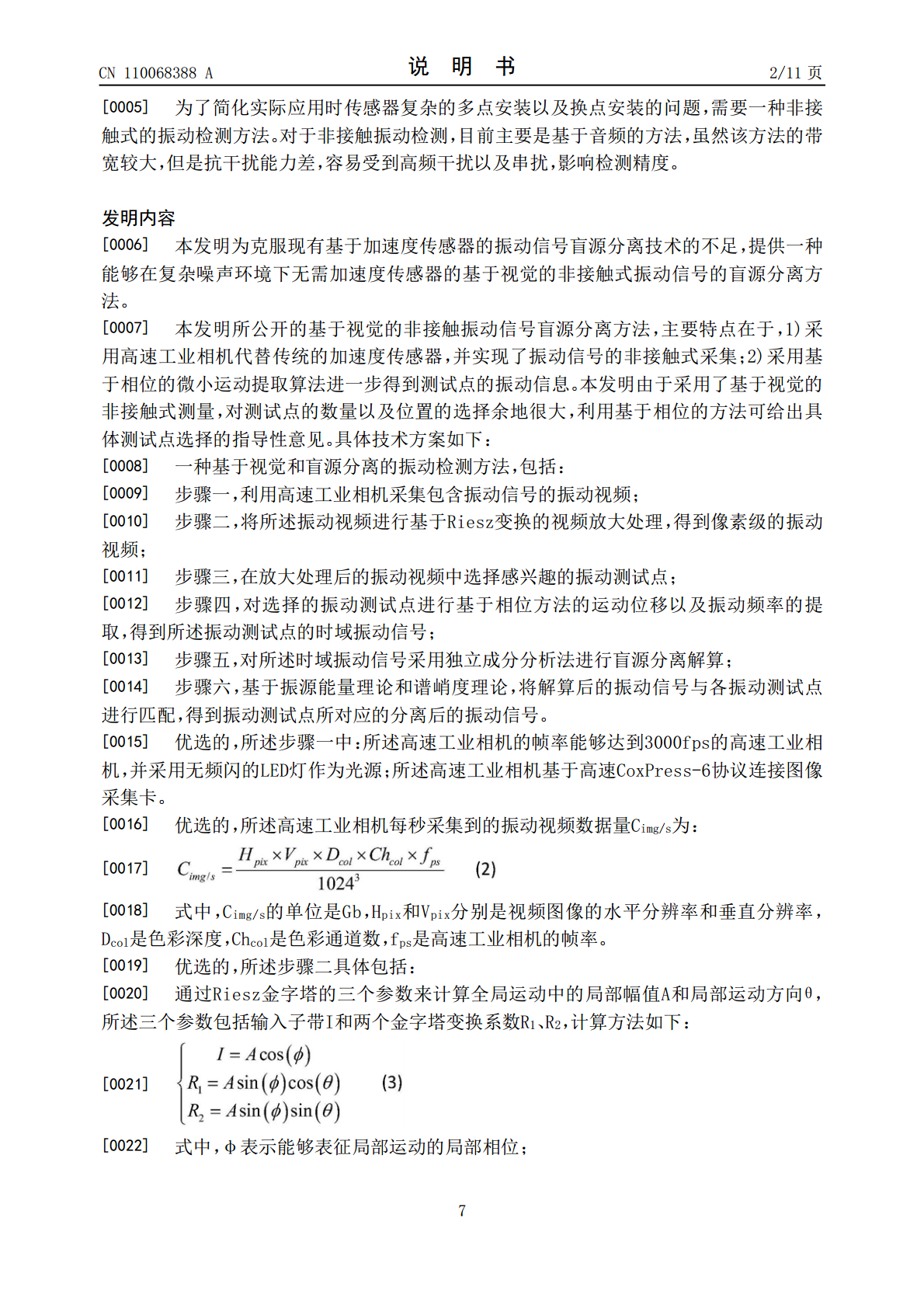
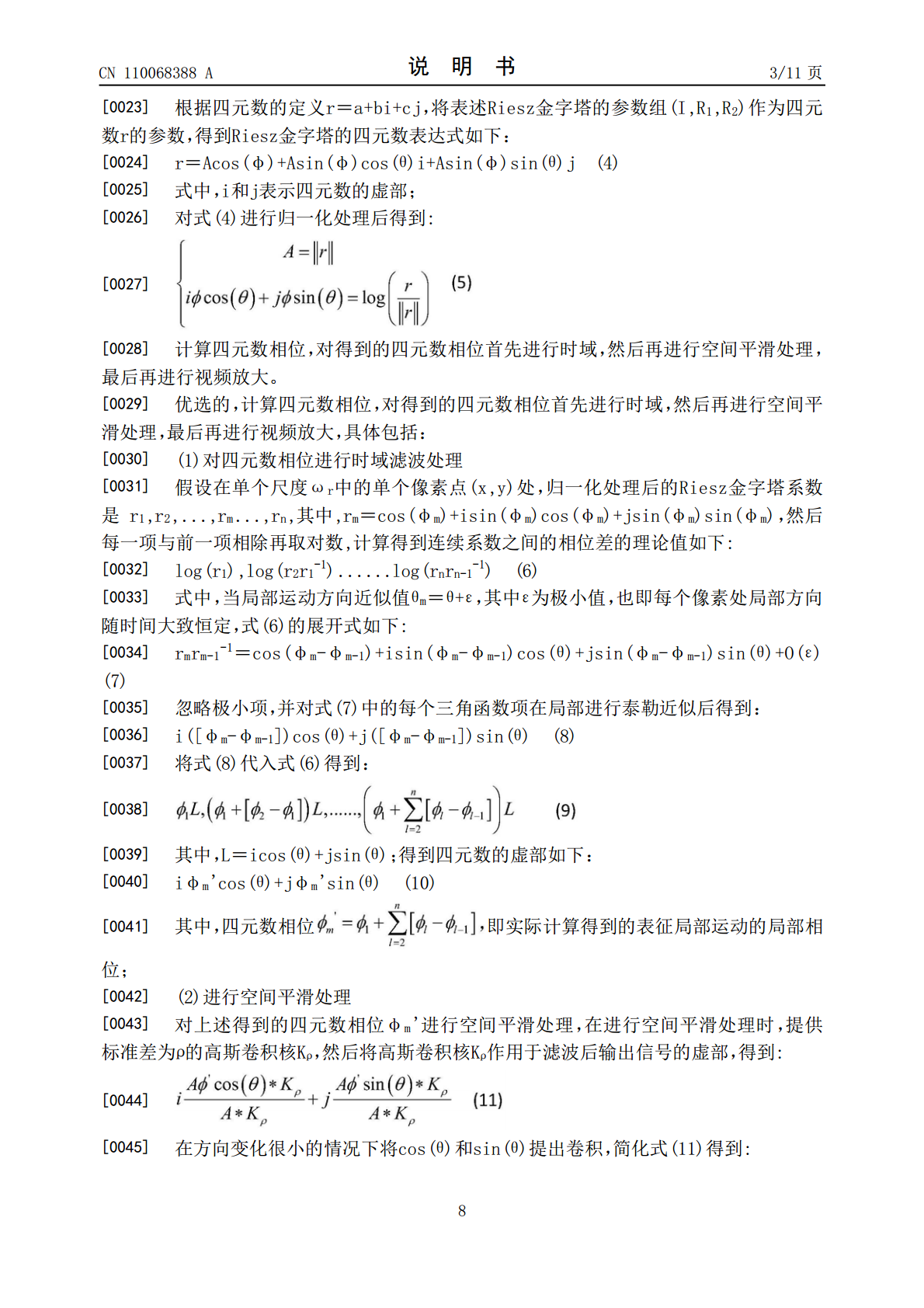
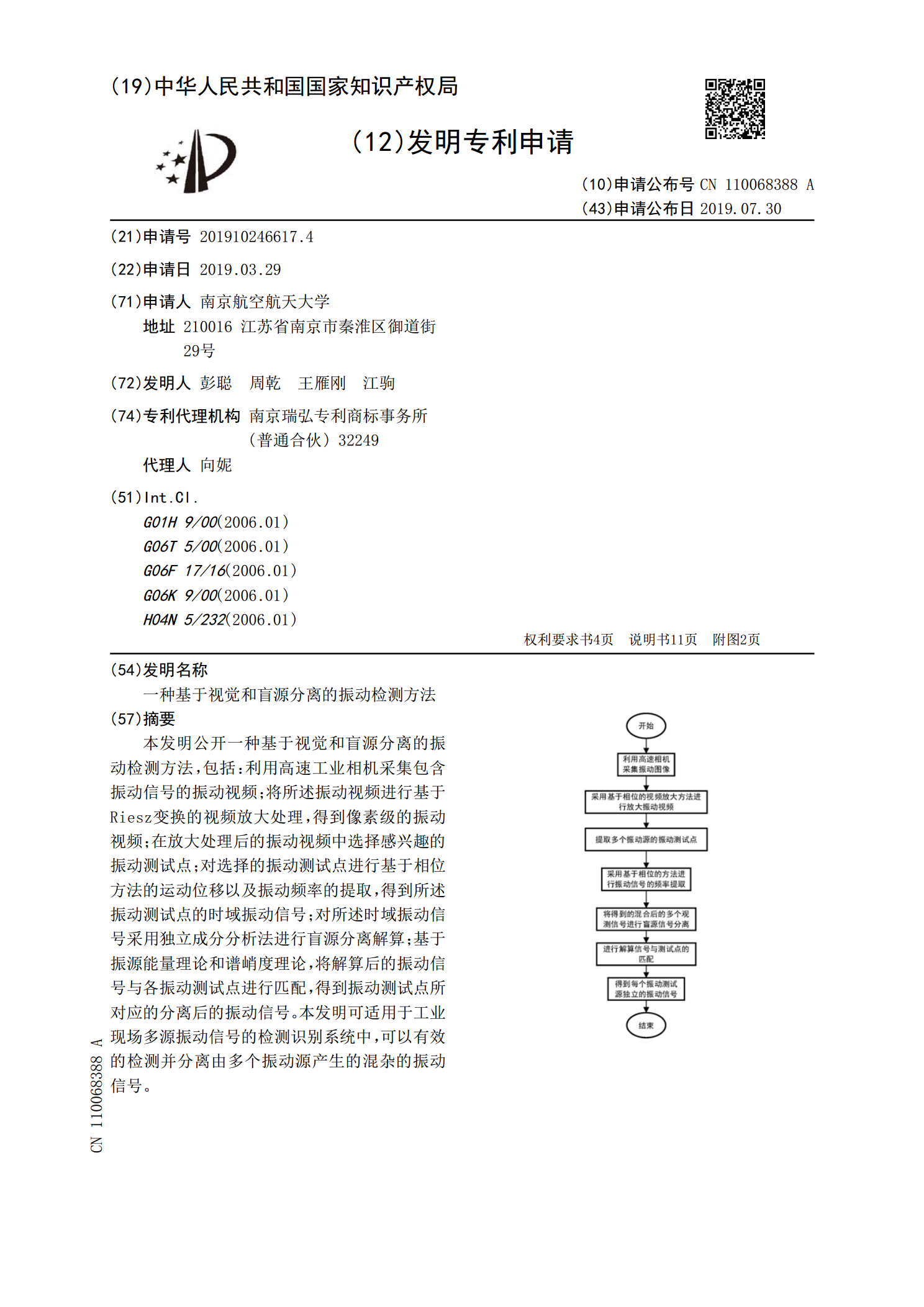
本发明公开一种基于视觉和盲源分离的振动检测方法,包括:利用高速工业相机采集包含振动信号的振动视频;将所述振动视频进行基于Riesz变换的视频放大处理,得到像素级的振动视频;在放大处理后的振动视频中选择感兴趣的振动测试点;对选择的振动测试点进行基于相位方法的运动位移以及振动频率的提取,得到所述振动测试点的时域振动信号;对所述时域振动信号采用独立成分分析法进行盲源分离解算;基于振源能量理论和谱峭度理论,将解算后的振动信号与各振动测试点进行匹配,得到振动测试点所对应的分离后的振动信号。本发明可适用于工业现场多源
一种基于稀疏盲源分离的卫星微振动源定量识别方法.pdf
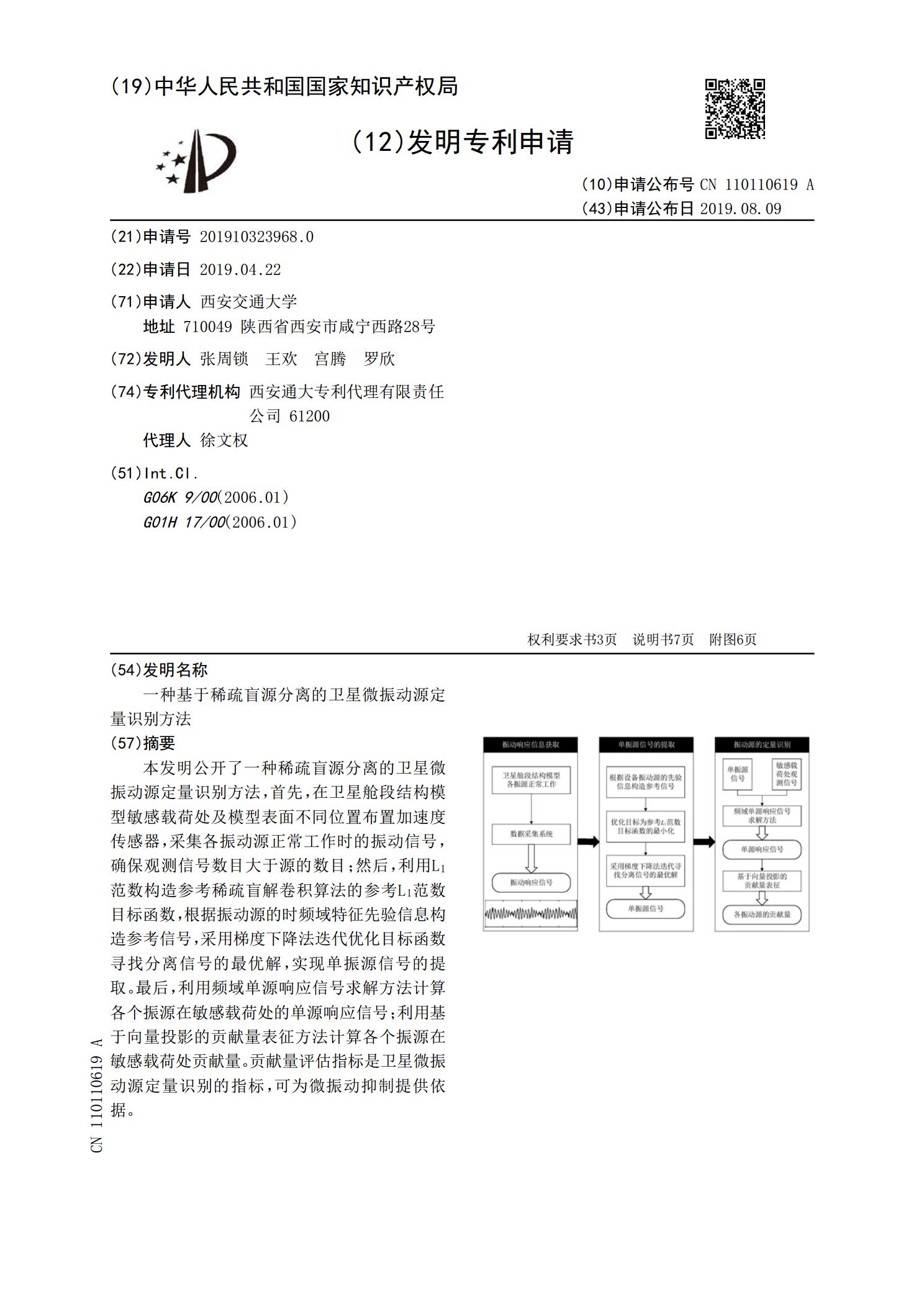
本发明公开了一种稀疏盲源分离的卫星微振动源定量识别方法,首先,在卫星舱段结构模型敏感载荷处及模型表面不同位置布置加速度传感器,采集各振动源正常工作时的振动信号,确保观测信号数目大于源的数目;然后,利用L
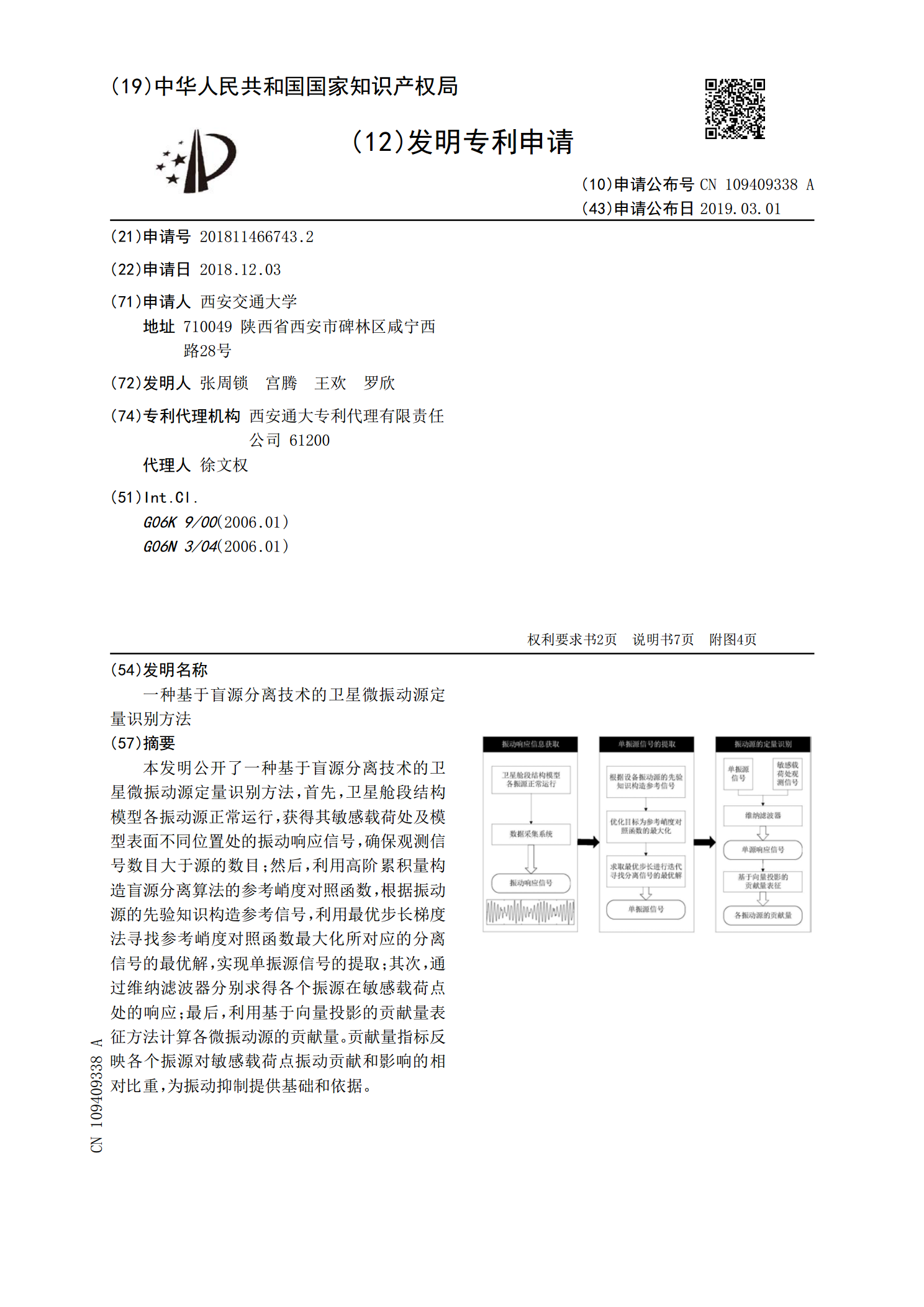
一种基于盲源分离技术的卫星微振动源定量识别方法.pdf
本发明公开了一种基于盲源分离技术的卫星微振动源定量识别方法,首先,卫星舱段结构模型各振动源正常运行,获得其敏感载荷处及模型表面不同位置处的振动响应信号,确保观测信号数目大于源的数目;然后,利用高阶累积量构造盲源分离算法的参考峭度对照函数,根据振动源的先验知识构造参考信号,利用最优步长梯度法寻找参考峭度对照函数最大化所对应的分离信号的最优解,实现单振源信号的提取;其次,通过维纳滤波器分别求得各个振源在敏感载荷点处的响应;最后,利用基于向量投影的贡献量表征方法计算各微振动源的贡献量。贡献量指标反映各个振源对敏
一种单通道振动信号盲源分离方法.pdf
本发明公开了一种单通道振动信号盲源分离方法,包括以下步骤:S1:将各途径到达的多途原始单通道振动观测信号同相叠加,然后对叠加后的原始单通道振动观测信号进行降噪处理,得到降噪后的单通道振动观测叠加信号;S2:利用小波分解与重构将降噪后的单通道振动观测叠加信号转化为多通道振动观测信号;S3:利用基于时频分析的盲源分离算法分析多通道振动观测信号,得到原始单通道振动观测信号的估计信号,实现了单通道振动信号盲源分离。本发明能够增强原始单通道振动观测信号的信号能量,且能够降低噪音,使得盲源分离效果较好,有效的提高了信
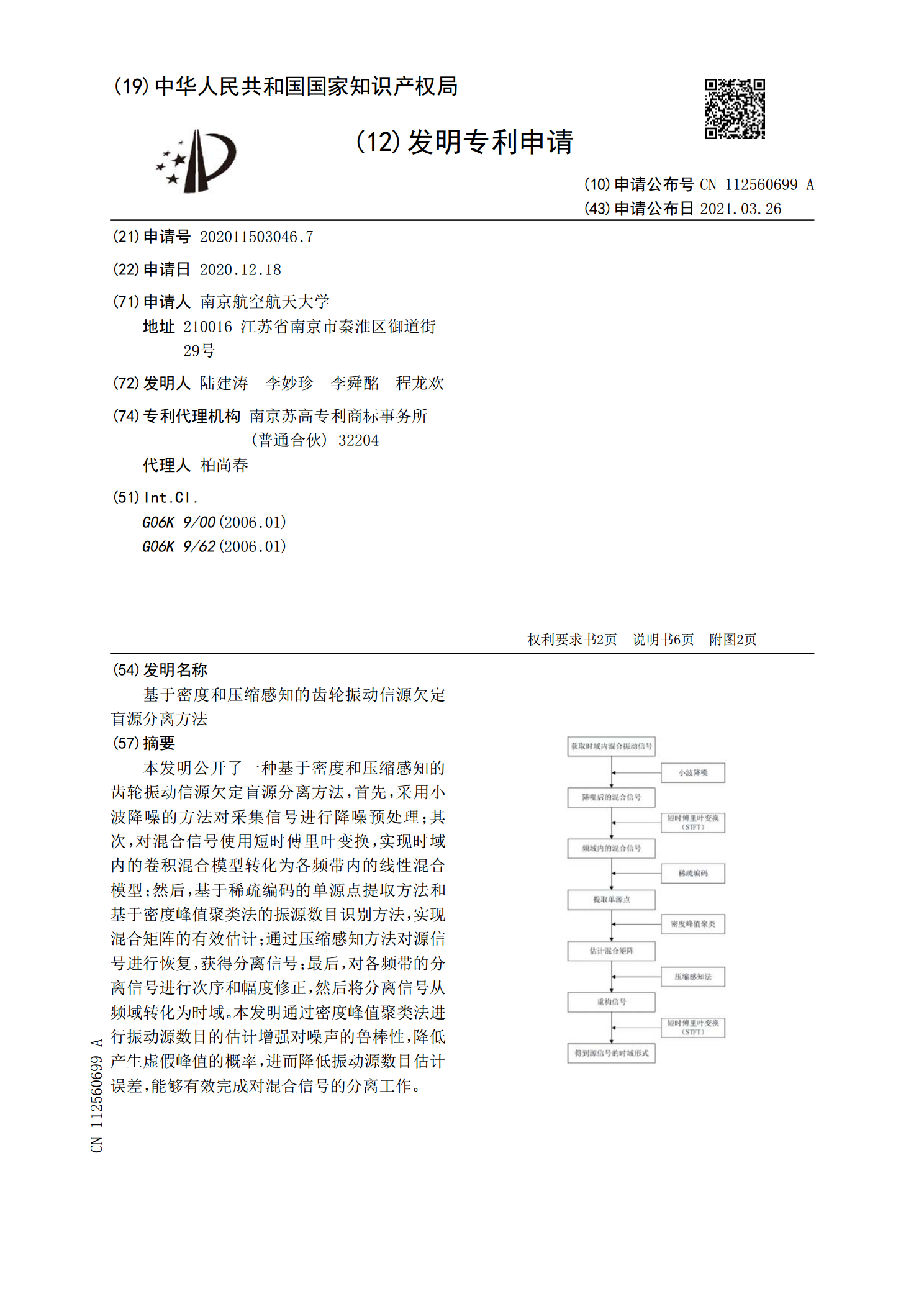
基于密度和压缩感知的齿轮振动信源欠定盲源分离方法.pdf
本发明公开了一种基于密度和压缩感知的齿轮振动信源欠定盲源分离方法,首先,采用小波降噪的方法对采集信号进行降噪预处理;其次,对混合信号使用短时傅里叶变换,实现时域内的卷积混合模型转化为各频带内的线性混合模型;然后,基于稀疏编码的单源点提取方法和基于密度峰值聚类法的振源数目识别方法,实现混合矩阵的有效估计;通过压缩感知方法对源信号进行恢复,获得分离信号;最后,对各频带的分离信号进行次序和幅度修正,然后将分离信号从频域转化为时域。本发明通过密度峰值聚类法进行振动源数目的估计增强对噪声的鲁棒性,降低产生虚假峰值的