
基于密度和压缩感知的齿轮振动信源欠定盲源分离方法.pdf

是立****92

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于密度和压缩感知的齿轮振动信源欠定盲源分离方法.pdf
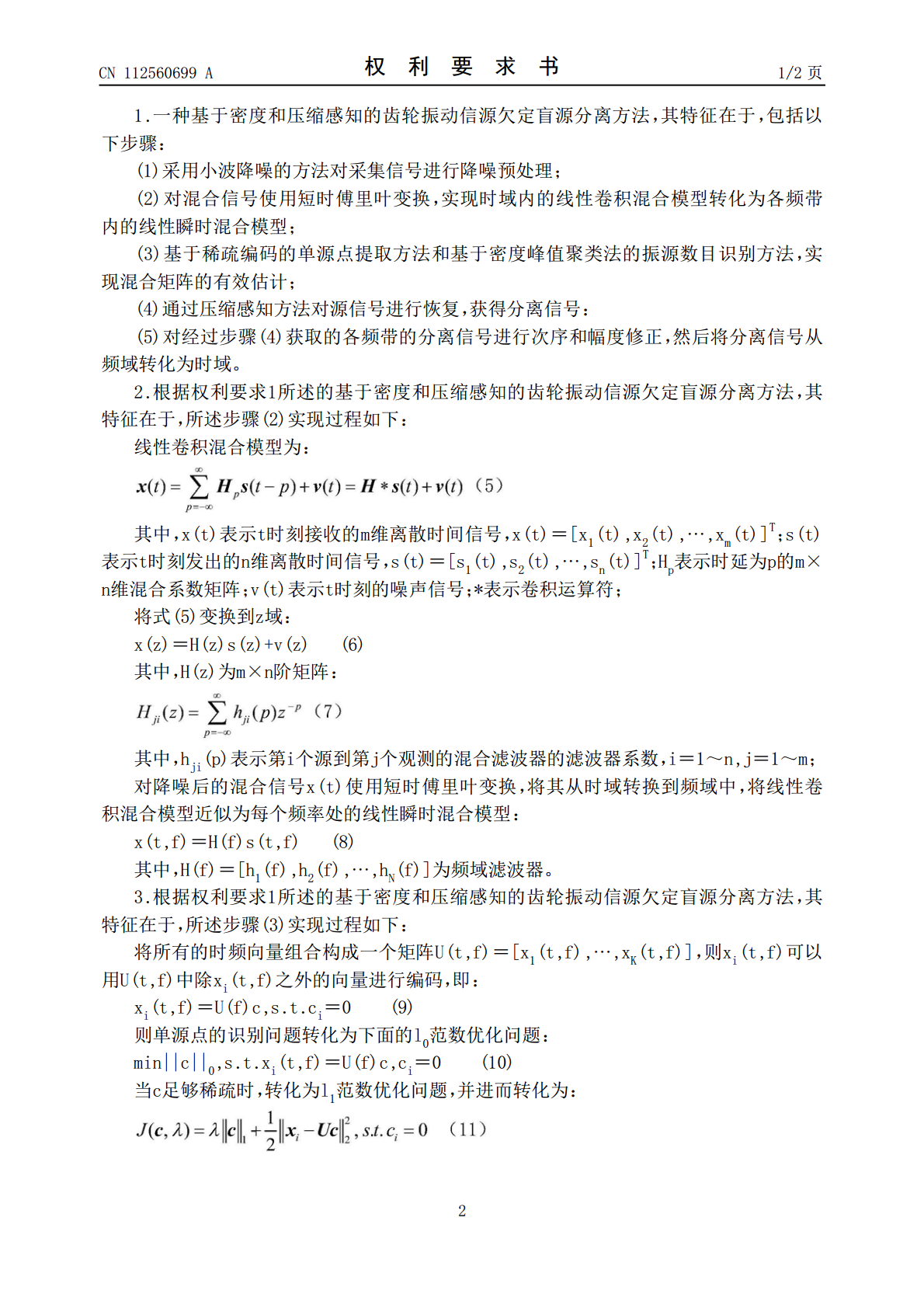
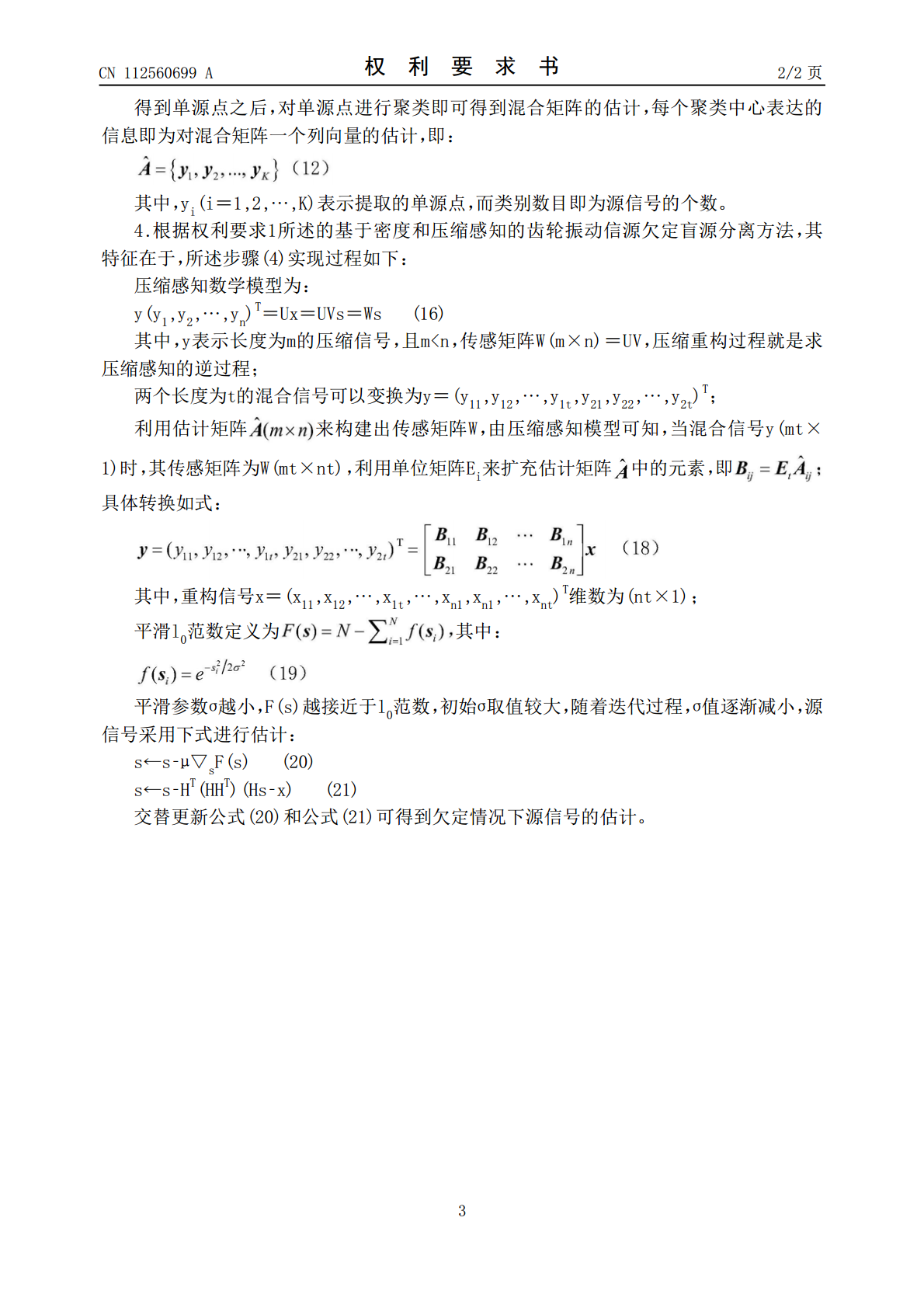
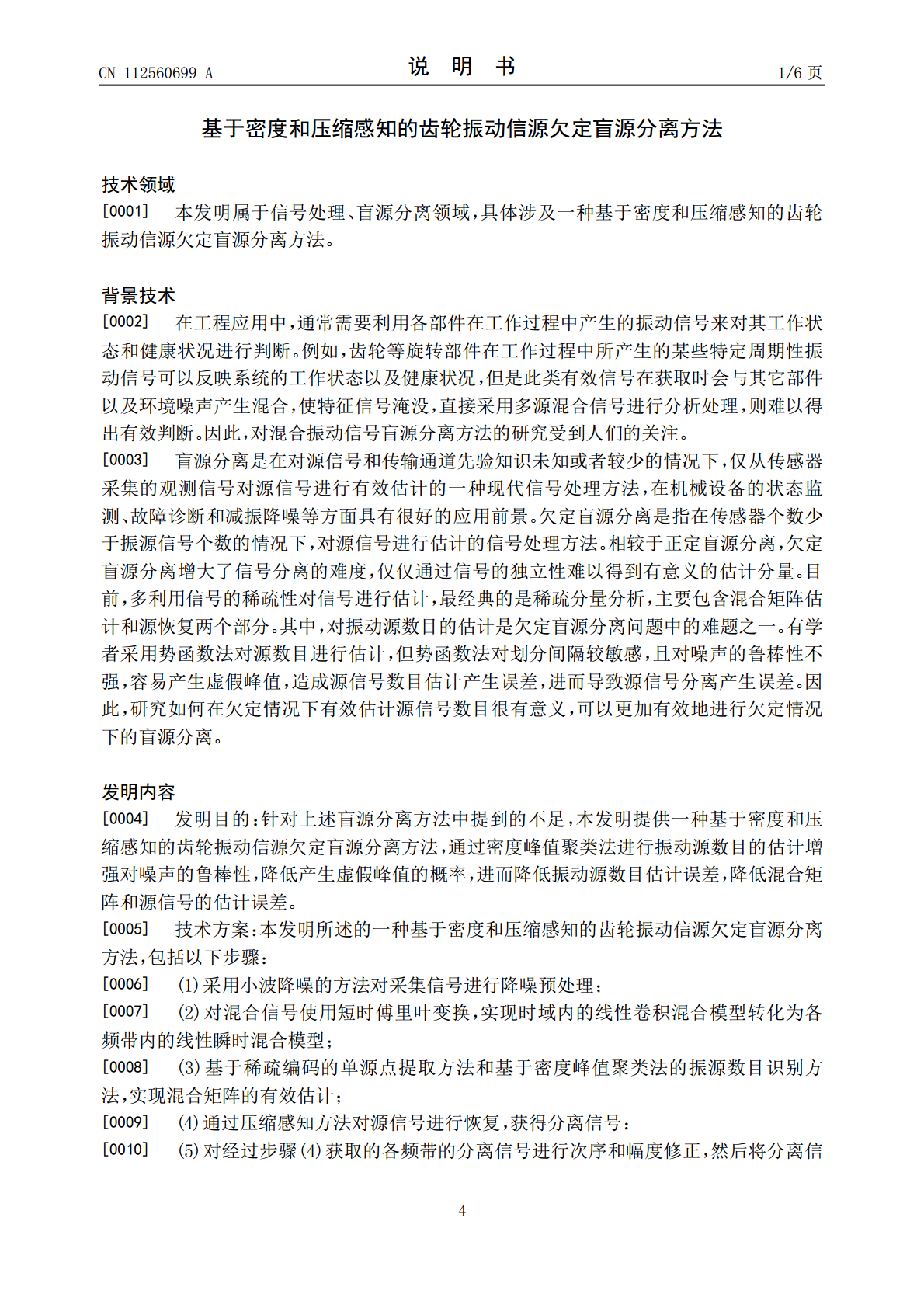
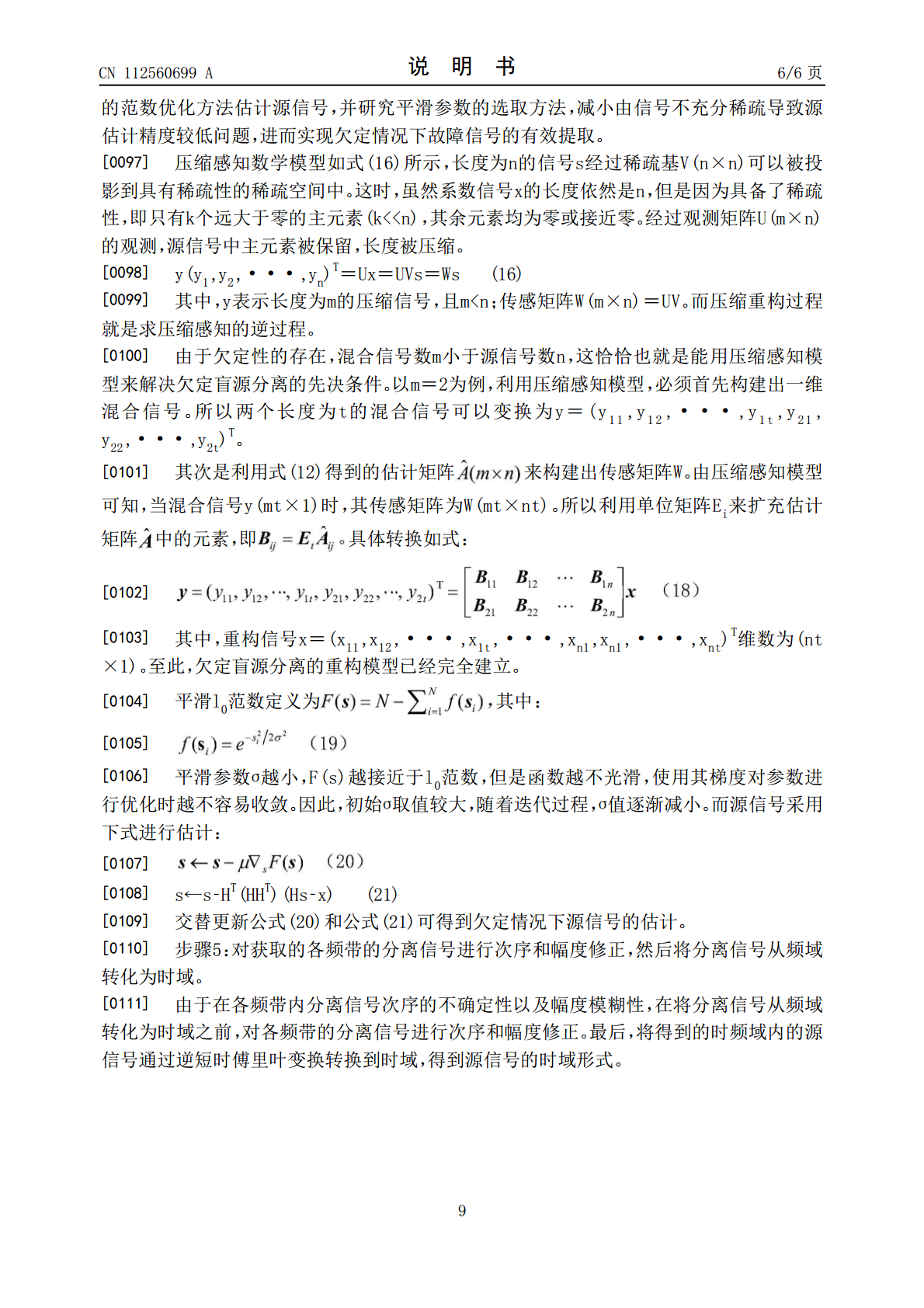
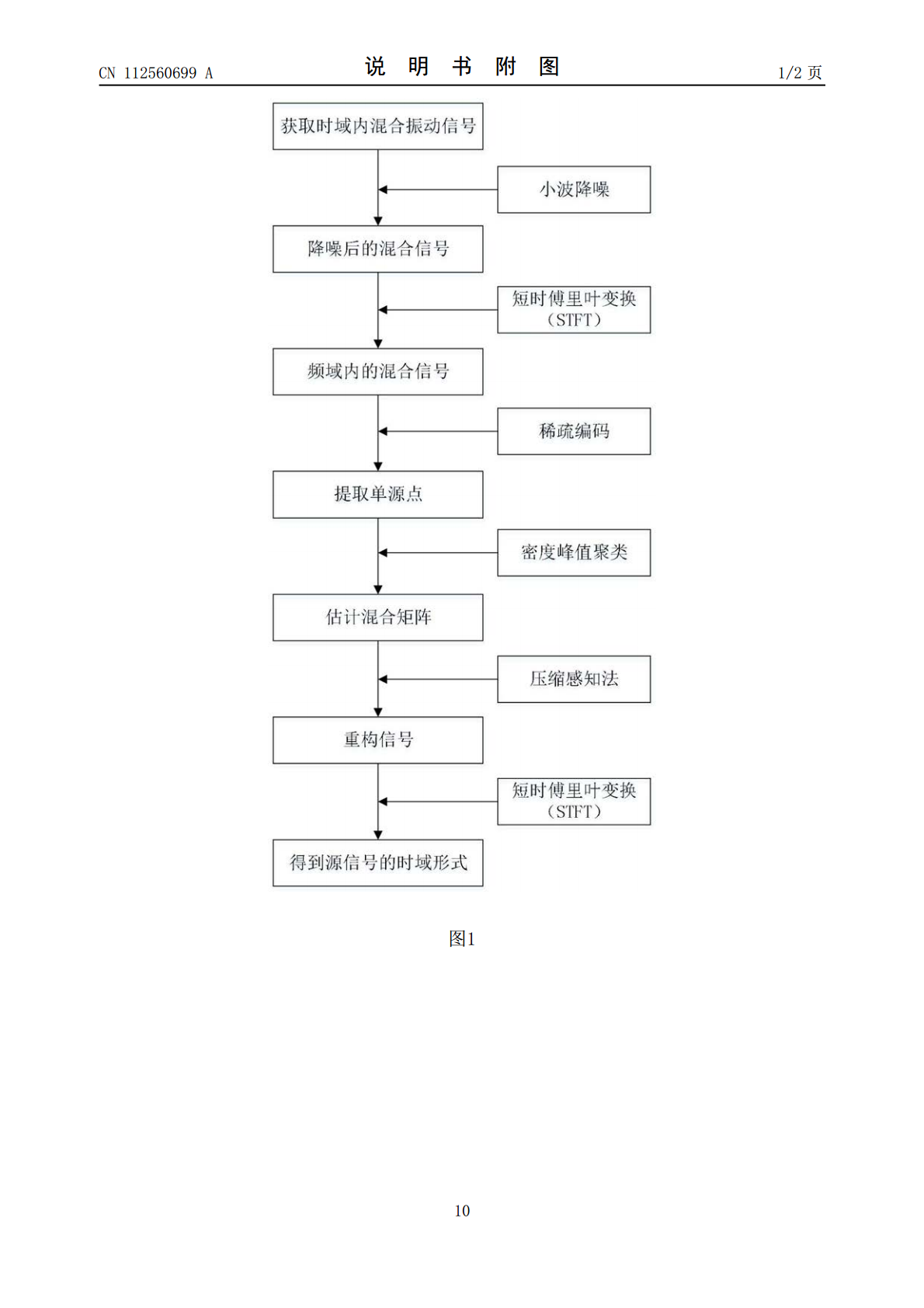
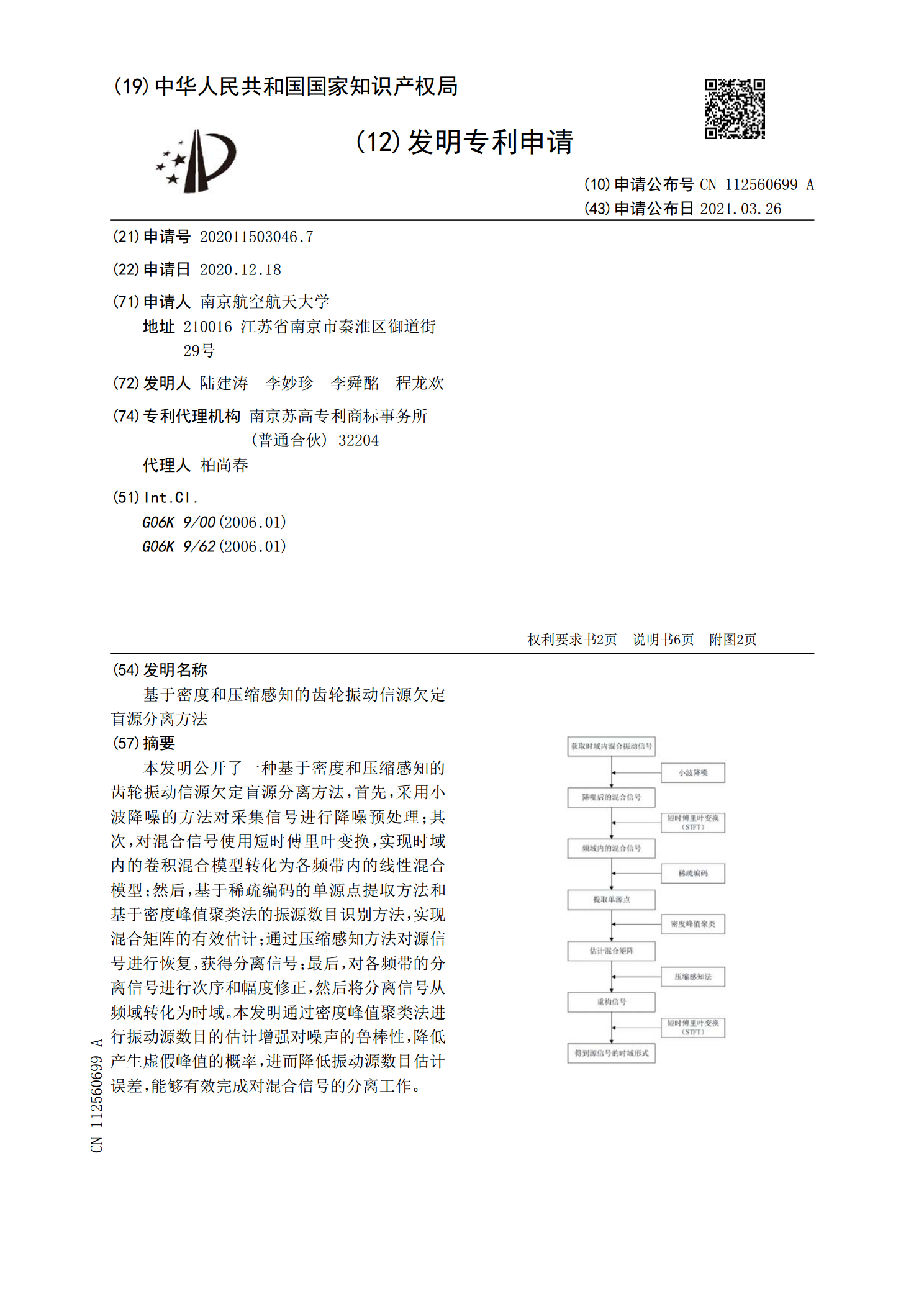
本发明公开了一种基于密度和压缩感知的齿轮振动信源欠定盲源分离方法,首先,采用小波降噪的方法对采集信号进行降噪预处理;其次,对混合信号使用短时傅里叶变换,实现时域内的卷积混合模型转化为各频带内的线性混合模型;然后,基于稀疏编码的单源点提取方法和基于密度峰值聚类法的振源数目识别方法,实现混合矩阵的有效估计;通过压缩感知方法对源信号进行恢复,获得分离信号;最后,对各频带的分离信号进行次序和幅度修正,然后将分离信号从频域转化为时域。本发明通过密度峰值聚类法进行振动源数目的估计增强对噪声的鲁棒性,降低产生虚假峰值的

基于势函数与压缩感知的欠定盲源分离.docx
基于势函数与压缩感知的欠定盲源分离基于势函数与压缩感知的欠定盲源分离摘要:欠定盲源分离是指从混合信号中分离出多个源信号,且混合矩阵未知的问题。本论文提出了一种基于势函数与压缩感知的方法用于欠定盲源分离。首先,通过构造势函数来描述混合矩阵的结构;其次,利用压缩感知算法对混合信号进行稀疏表示;最后,通过优化算法来估计混合矩阵以及源信号。实验证明,该方法能够有效地分离出混合信号中的源信号,并且具有较好的鲁棒性和实时性。关键词:欠定盲源分离;势函数;压缩感知;稀疏表示;优化算法;源信号1.引言欠定盲源分离是一种重
基于密度的欠定盲源分离方法.pdf
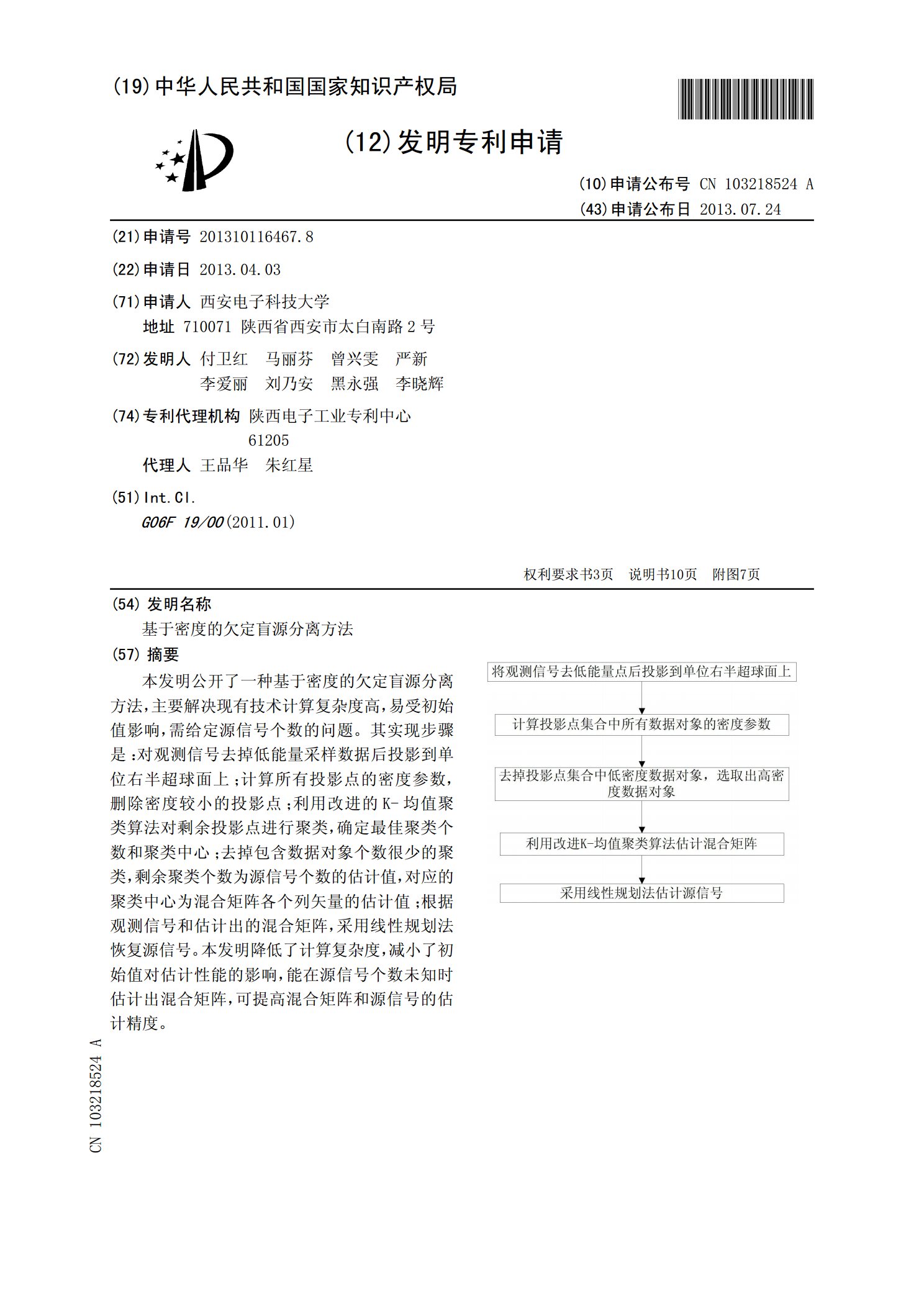
本发明公开了一种基于密度的欠定盲源分离方法,主要解决现有技术计算复杂度高,易受初始值影响,需给定源信号个数的问题。其实现步骤是:对观测信号去掉低能量采样数据后投影到单位右半超球面上;计算所有投影点的密度参数,删除密度较小的投影点;利用改进的K-均值聚类算法对剩余投影点进行聚类,确定最佳聚类个数和聚类中心;去掉包含数据对象个数很少的聚类,剩余聚类个数为源信号个数的估计值,对应的聚类中心为混合矩阵各个列矢量的估计值;根据观测信号和估计出的混合矩阵,采用线性规划法恢复源信号。本发明降低了计算复杂度,减小了初始值

基于混合聚类和压缩感知的欠定盲源分离研究.docx
基于混合聚类和压缩感知的欠定盲源分离研究基于混合聚类和压缩感知的欠定盲源分离研究摘要:欠定盲源分离是信号处理领域中的热点问题之一,本文介绍了一种基于混合聚类和压缩感知的欠定盲源分离算法。该算法首先利用混合高斯模型对混合信号进行聚类,得到每个源信号的聚类中心(即簇),然后利用压缩感知理论对每个簇进行稀疏表示,进而实现对源信号的分离。实验结果表明,该算法在欠定情况下能够有效地分离混合信号,且具有较好的鲁棒性和稳定性。关键词:欠定盲源分离、混合聚类、压缩感知、簇、稀疏表示引言:欠定盲源分离是信号处理领域中的重要

基于混合聚类和压缩感知的欠定盲源分离研究的中期报告.docx
基于混合聚类和压缩感知的欠定盲源分离研究的中期报告一、研究背景和意义随着信息技术和通信技术的不断发展,人们对于多源混合信号的分离与恢复需求越来越高。欠定盲源分离是其中一个重要的研究方向。该任务目的在于从混合信号中提取出各源信号而无需知道源信号数目和信息。欠定盲源分离问题目前存在以下挑战:1.多源信号数目难以确定,且其相互影响不可忽略;2.数据量过大,数据存储与传输存在困难;3.多源信号具有高度复杂性,分离算法的复杂度高,耗时长。本文旨在研究基于混合聚类和压缩感知的欠定盲源分离方法,并探究其在多源混合信号分